
通过Clarke变换后所得到的α、β静止坐标系上的分量,我们要注意现在得到的还是正弦信号,既不是阶跃信号,也不是斜坡信号。
目前的主要控制方法是以PI控制器为主。然而PI控制器只能实现直流信号的无稳态误差的跟踪,当它跟踪正弦波信号时,必然出现不稳定的稳态误差。那么为了实现对α、β轴分量的无稳态误差控制,主要有两种方向:
一是设计一种能够对正弦波信号无稳态误差的控制器(明显有研究深度,较困难);
二是将正弦波信号转化为直流信号,从而可以继续采用PI控制器(难度降低);
显然我们的前辈对PI控制器的参数整定方法已经比较熟悉,因此采用第二种方式将一个新问题转为已解决的问题,可大大简化设计难题,于是Robert H. Park提出了park变换。

如上图所示,合成矢量Vδ在α、β坐标系下的投影 Vα,Vβ 的幅值是正弦变换的。设计 d、q 坐标系,当它与Vδ以相同的角速度旋转时,在d、q轴上的投影Vd,Vq的幅值是恒定的,即相对于选择矢量而言,Vd,Vq为直流量,这样就可沿用PI控制策略进行设计。
具体矩阵算法如下;

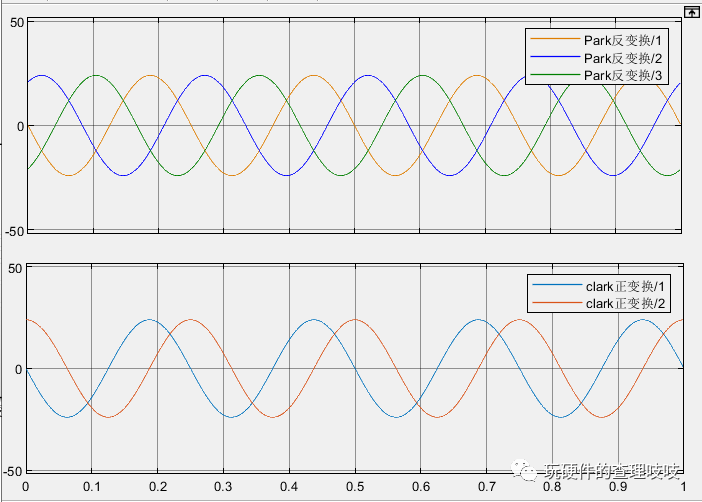
依据公式搭建matlab模型,设定矢量旋转的电磁角度θ=0.25s/2pi,仿真出波形如下;

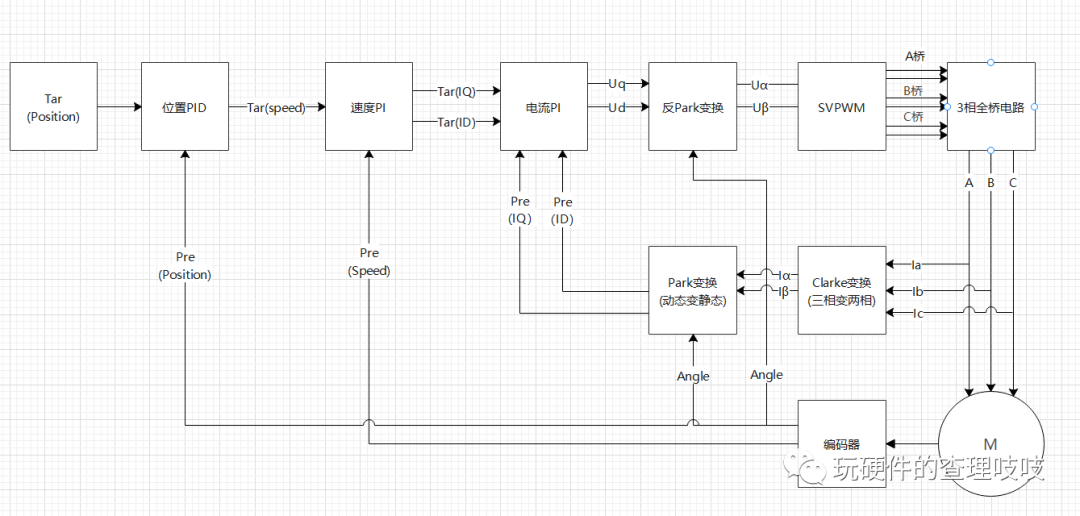
综上介绍了SVPWM的坐标变换,我认为矢量控制的本质即有功和无功的单独控制。而坐标变换,是其实现解耦的方法。矢量控制即“磁场定向控制”,意思就是把磁场方向,定向在一个坐标轴D轴上(人为定义),而转矩的方向与磁场正好垂直,它也就恰好被定向到了Q轴上(人为定义与D轴垂直)。把电机的电流也同样解耦在该DQ坐标轴上,就可以分别转矩与磁场分别解耦控制。









