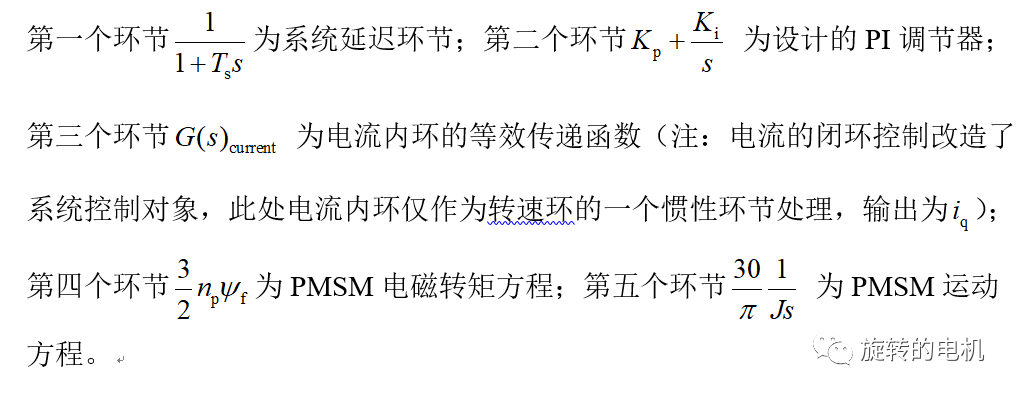
前言
本章节采用工程设计的方法,推导转速环PI调节器参数的计算公式,由此来设计永磁同步电机磁场定向控制的转速外环PI调节器参数,并通过Matlab/Simulink对设计的PI调节器进行Bode图分析,最后通过一个设计实例进行仿真验证。
一、调节器的工程设计方法
要实现调节器的工程设计方法,首先要简化问题,突出设计的主要矛盾。简化的基本思路就是把调节器的设计过程分成两步:
1、选择调节器的结构,以确保系统稳定,同时满足所需要的稳态精度
2、再选择调节器的参数,以满足系统动态性能指标的要求
选择调节器的结构,使系统能满足所需要的稳态精度,这是设计过程中的第一步。由于III型及III型以上的系统很难稳定,因此常把I型系统和II型系统作为系统设计的目标。
二、转速环PI调节器的参数整定
工程设计方法的原则是:先设计内环后设计外环,上一章节设计了永磁同步电机磁场定向控制的电流内环PI调节器,本章节接着设计转速外环PI调节器,不同于将电流内环校正为典型I型系统, 转速外环的设计目标是将系统校正为典型II型系统 。
2.1.转速环的结构框图
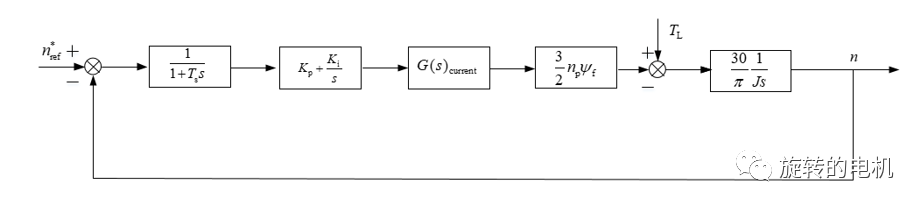
控制系统的数学模型是进行设计的基础,下图为转速环的结构框图:
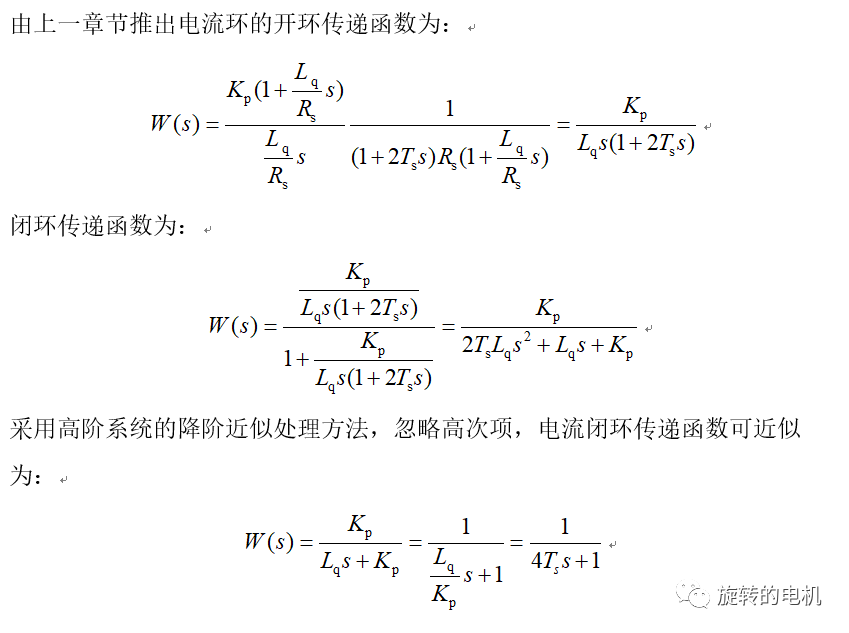
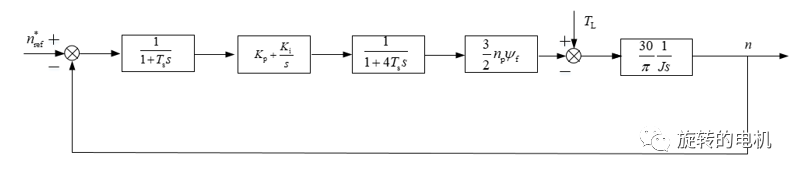
将电流环的等效传递函数填入转速环的结构框图如下:
通过下述处理,进一步简化转速环的结构框图:
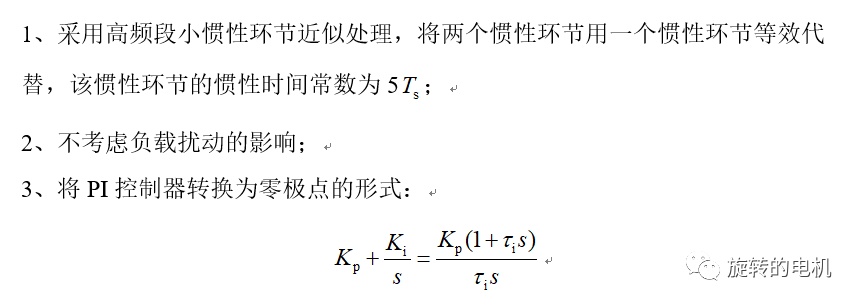
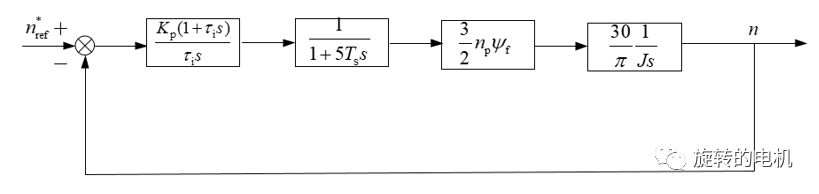
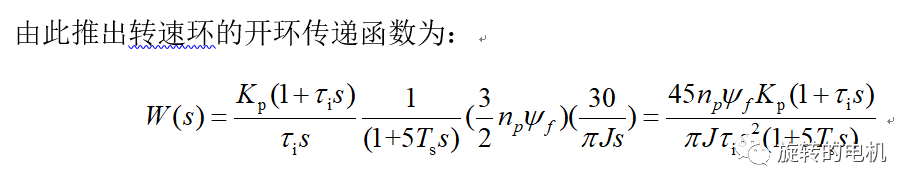
简化后的转速环结构框图为:
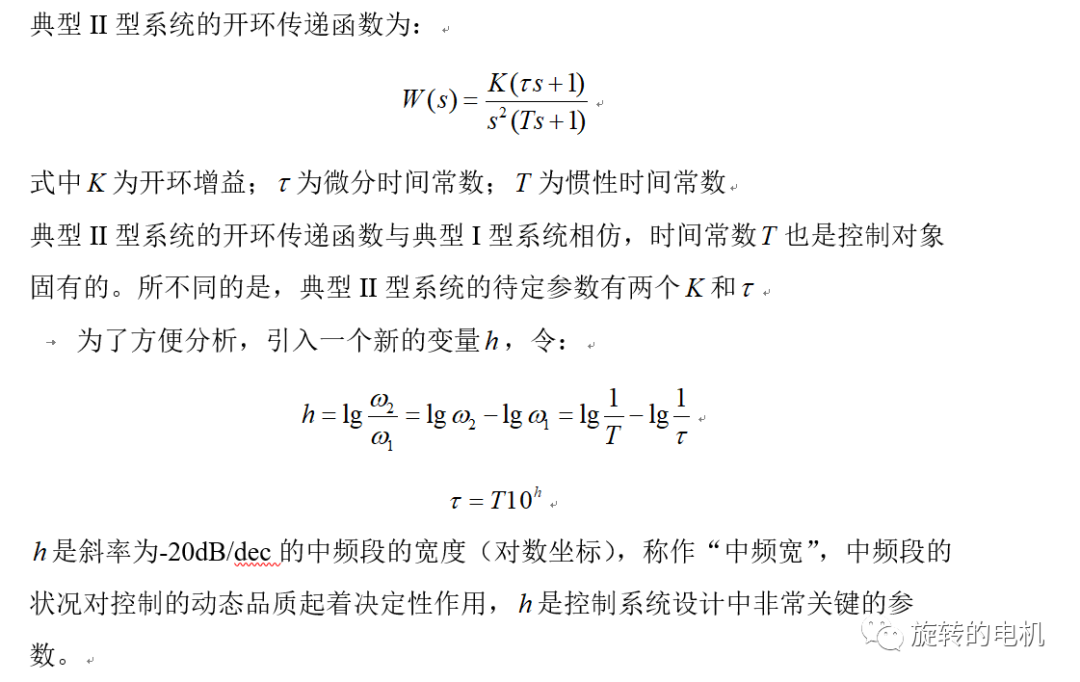
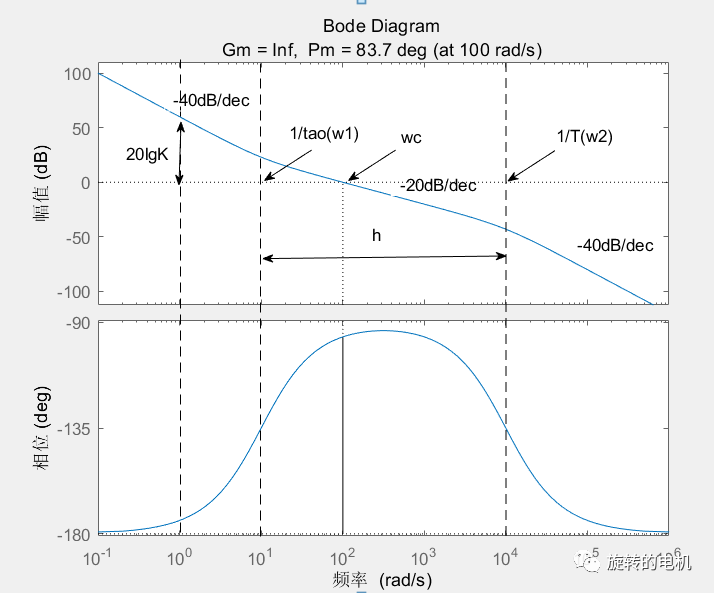
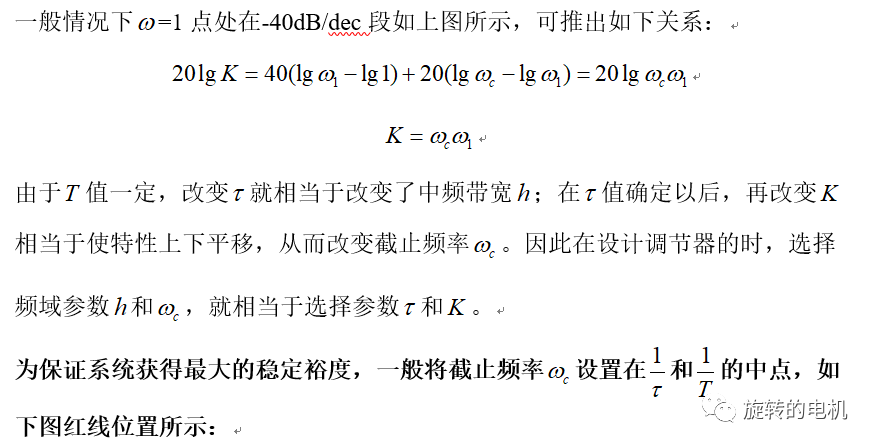
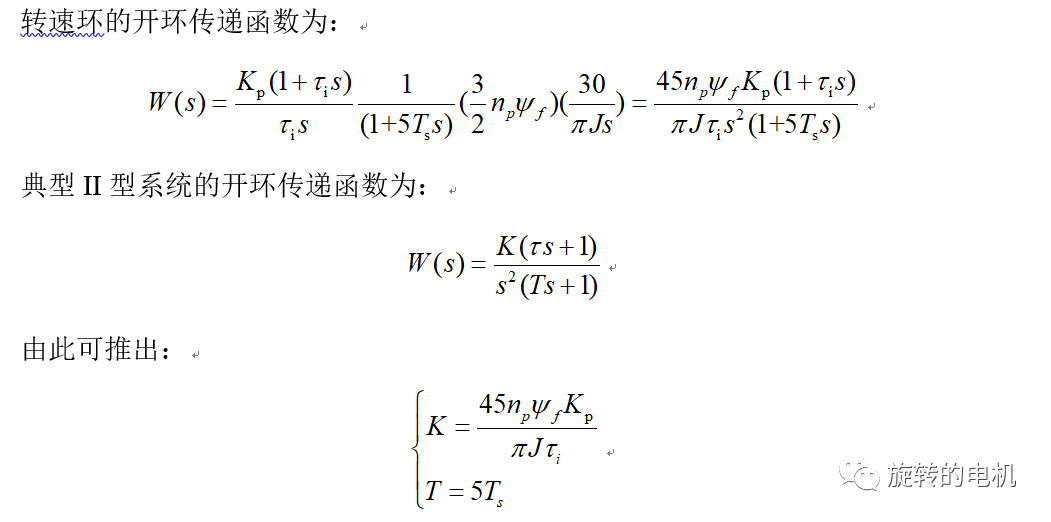
2.2.典型II型系统

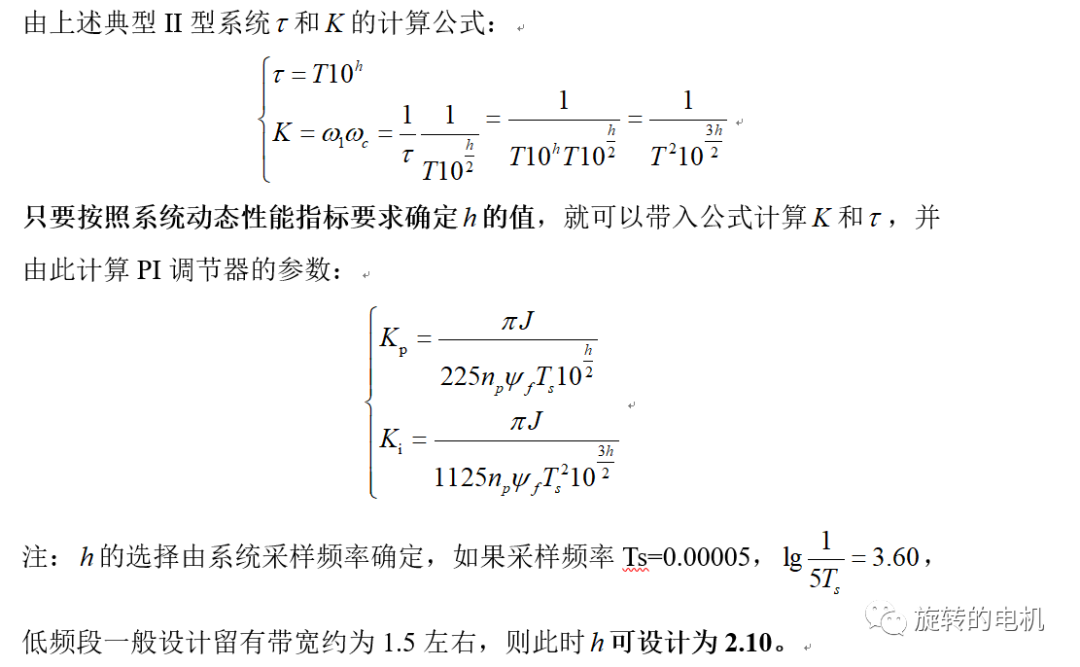
2.3.转速环PI参数整定计算公式
三、转速环PI调节器设计实例
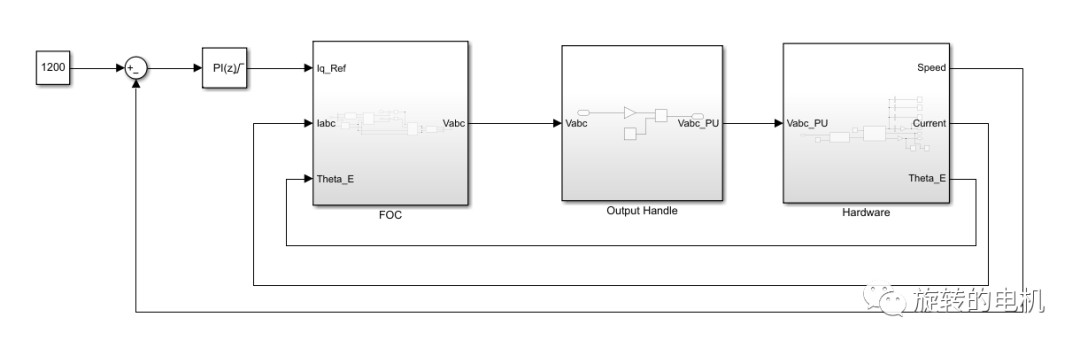
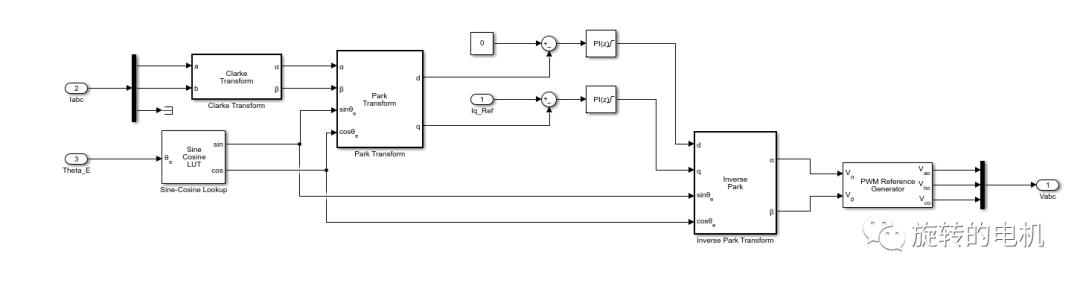
3.1.永磁同步电机磁场定向的转速外环电流内环双闭环控制
3.2.转速环PI参数计算
电机参数如下:
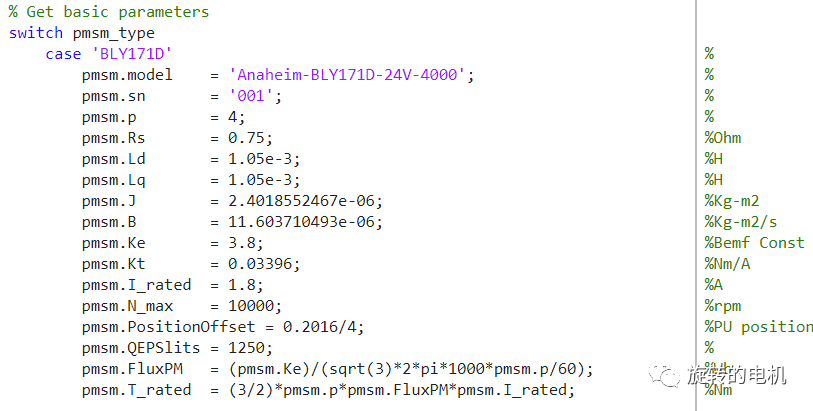
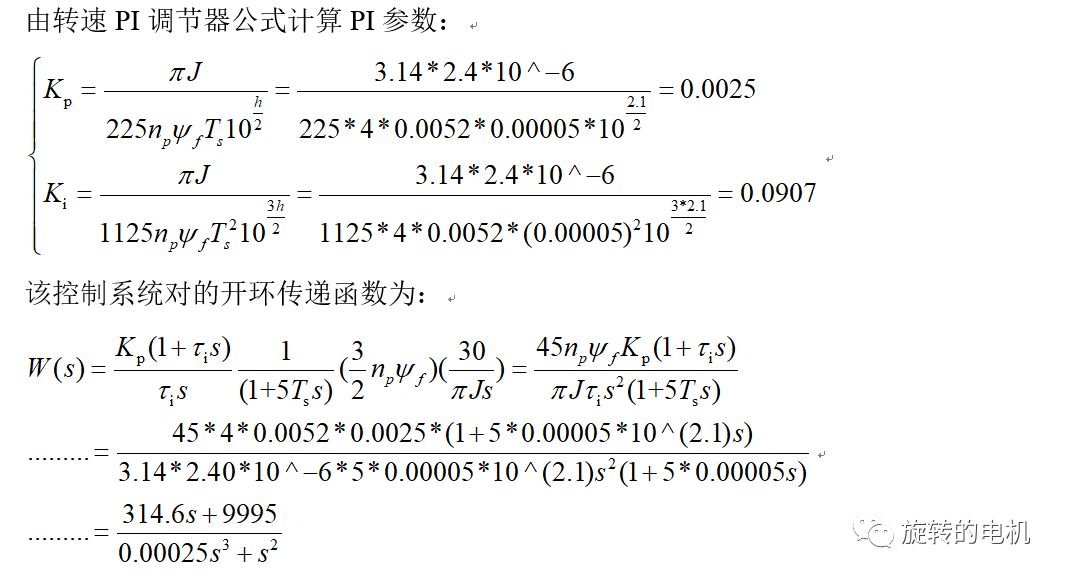
设定系统采样频率为20KHz,即Ts=0.00005s,h设计为2.1,由转速环PI调节器参数计算公式得:
绘制该系统开环Bode图如下:
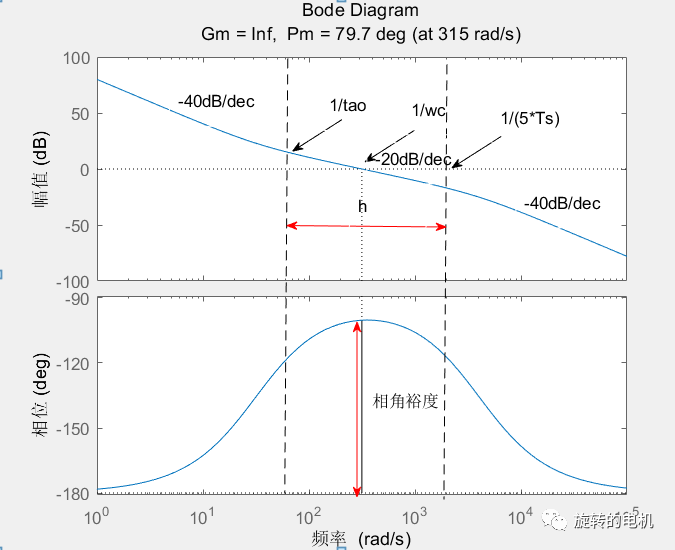
该系统的截止频率wc为315rad/s位于1/tao和1/T的中间,此时获得系统最大相角裕度为79.7度,符合自己的设计要求。
绘制该系统的闭环Bode图如下:
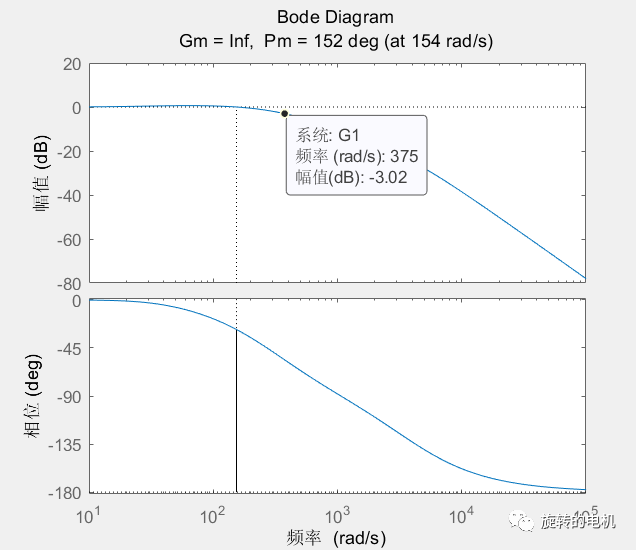
由上图可知该系统的带宽频率约为375rad/s。
3.3.仿真分析
将Kp=0.0025,Ki=0.0907带入仿真模型的转速环PI调节器中,上一章节计算出的电流内环PI参数Kp=5.25,Ki=3750带入两个电流环调节器中,进行仿真分析:
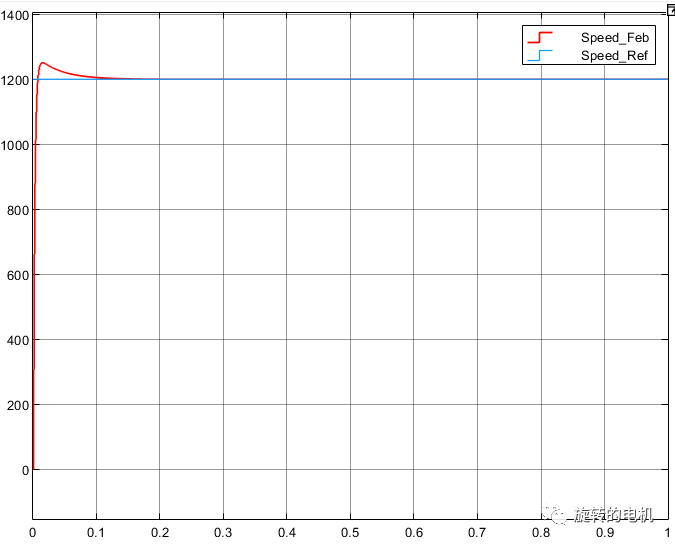
电机转速:如果控制效果不好可以在工程设计参数的基础上进行参数微调也可以重新选择h值进行上述计算。
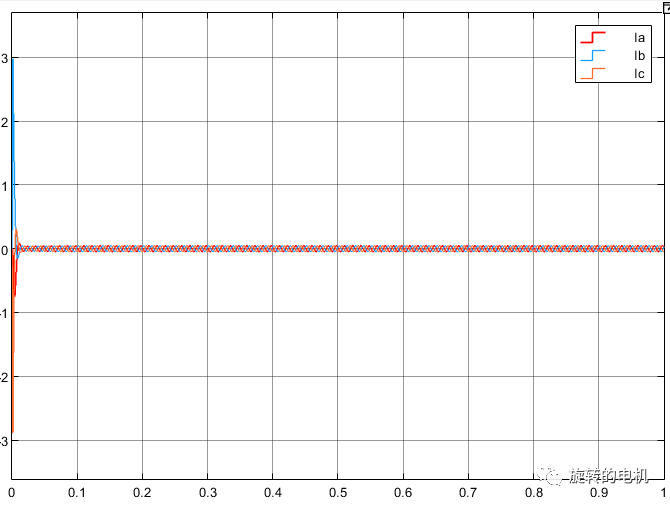
电机定子电流:
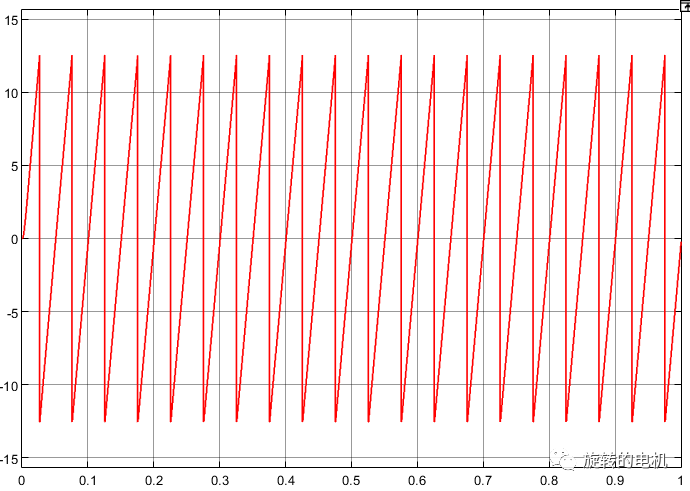
转子位置:
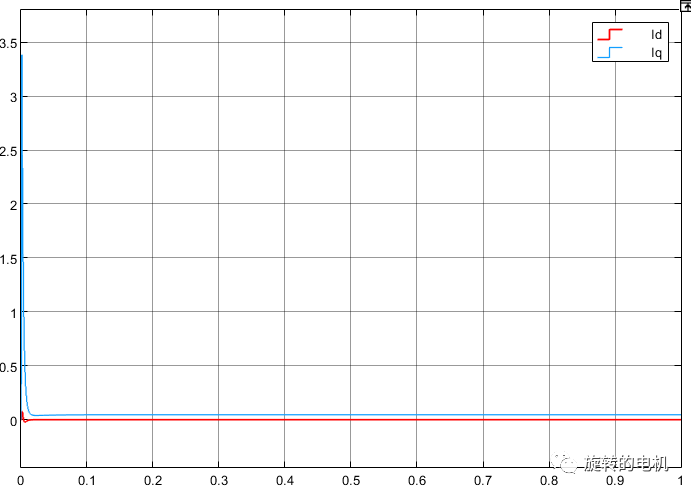
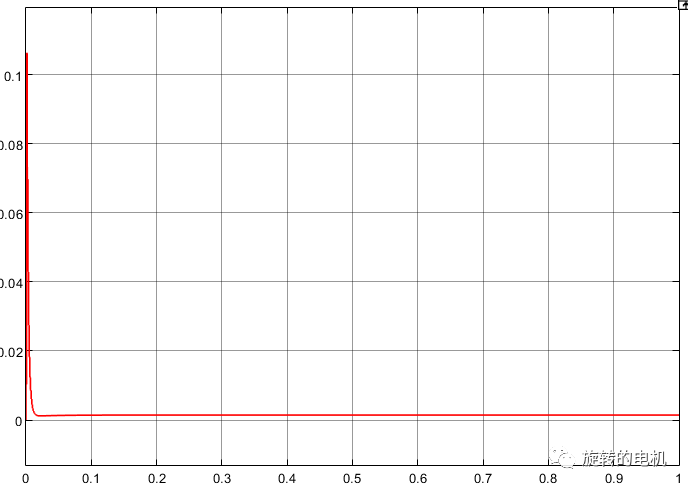
同步旋转坐标系下的定子电流Id、Iq:
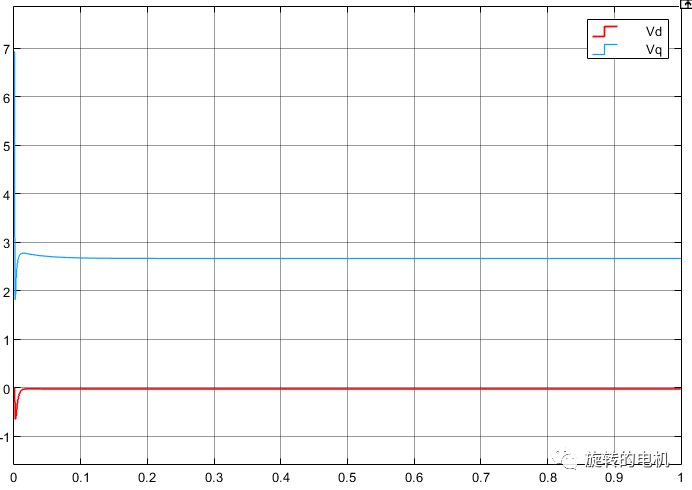
同步旋转坐标系下的定子电压:
电磁转矩:
总结
本章节采用工程设计的方法,推导出了转速环PI调节器参数的计算公式,由此来设计永磁同步电机磁场定向控制的转速外环PI调节器参数,并通过Matlab/Simulink对设计的PI调节器进行了Bode图分析,最后通过一个设计实例进行了仿真验证,为后续章节的分析奠定基础。