磁场定向控制中使用到的坐标变换主要有Clark变换、Park变换、Anti-Park变换。其中Clark变换是三相静止绕组A、B、C和两相静止绕组α-β之间的变换;Park变换是两相静止坐标系α-β到两相旋转坐标系d、q之间的变换;Anti-Park变换是Park的逆变换。
本篇文章将讲述Clark变换,从公式推导到仿真实现,最后到C语言代码实现验证Clark变换。
一、Clark坐标变换公式推导

图1 三相和两相坐标系与绕组磁动势的空间矢量
图1中绘出了A、B、C和α-β两个坐标系,为方便起见,取A轴与α轴重合。设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于有关相的坐标轴上。由于交流磁动势的大小随时间在变化着,图中磁动势矢量的长度是随意的。
设磁动势波形是正弦分布的,当三相总磁动势与两相总磁动势相等时,两套绕组瞬时磁动势在α、β轴上的投影都应相等,因此:

写成矩阵形式,得:
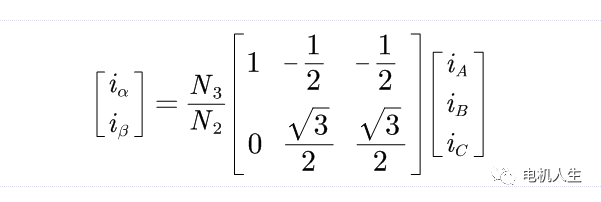
考虑变换前后总功率不变,得:

考虑变换前后幅值不变,得:

上面的变换矩阵即为Clark坐标变换矩阵,在PMSM矢量控制中主要用于将三相电流Ia、Ib、Ic变换成两相电流Ialpha、Ibeta。
二、Clark坐标变换Matlab/Simulink仿真验证
在Simulink中搭建Clark变换,本次仿真中使用的是等幅值变换。

仿真结果为:

三、Clark坐标变换C语言实现
在处理器中编写程序,并放在中断中运行,打印波形,观察Clark变换。实验结果如下:

使用J-Scope打印结果,上面为三相输入,下面为经坐标变换后的输出结果。
四、总结
本篇文章编写了电机矢量控制中使用到的坐标变换之Clark变换,并进行仿真和实验验证。









