随着越来越多的技术广泛应用于工业自动化,我们已经进入了工业4.0时代。新技术不断涌现,赋能人工智能和机器学习、数据分析、工业网络、网络安全和功能安全。然而,大多数工业自动化作为其他所有技术的核心,仍然依靠机器人和运动控制。
运动控制与电机控制经常同时出现,有点让人混淆。这两个概念有什么区别?在工业自动化中,我们如何将恰当的解决方案应用于其中一个概念,或同时应用于这两个概念?欢迎继续阅读,了解运动控制和电机控制的区别以及如何使它们协同工作。
什么是运动控制?
运动控制是工业自动化系统的子系统。它同步化控制多个电机来完成一系列运动。例如,多轴机械臂需要多个电机无缝地协同运行才能做出特定的动作。运动控制主要用于轨迹规划、速度规划、插补算法和运动学转换。运动控制系统经常出现在印刷、包装和装配应用中。
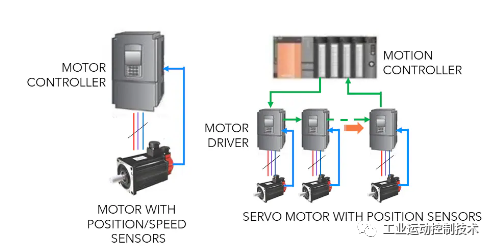
如下所示,运动控制系统通常由以下主要组件组成:
运动控制器,可生成轨迹规划,然后向电机驱动器提供控制命令。
电机驱动器,将运动控制器的控制命令(通常是速度或扭矩信号)转换为更高功率电压或电流信号来驱动电机
数个电机,可根据控制命令执行运动
位置传感器,将电机转子的位置/速度数据提供给位置/速度控制器,实现精确的位置/速度控制
电机控制与运动控制
另一方面,电机控制是更侧重于控制电机旋转的系统或技术。典型的电机控制系统调整单个电机的扭矩、速度和位置的一个或多个参数,以达到目标值。电机的类型不同,驱动电机的要求和技术可能会有很大差异。电机控制器通常没有规划能力(高级驱动器只有简单的位置和速度规划能力)。因此,解释电机控制和运动控制区别的简单方法是:
电机控制是运动控制系统的一个环节(通常是电流环,在扭矩控制模式下工作)
但是,有时我们可能会混淆它们,因为电机控制的位置环/速度环/扭矩环既可以在电机控制器中使用,也可以在运动控制器中使用
现在我们知道了这两个系统之间的差异,显而易见,它们的设计要求及资源也大不相同。
电机控制更侧重于使电机正常旋转,或者更确切地说,是换向。为了做到这一点,电机控制器需要与各种传感器对接,处理模拟和数字信号,并生成波形来驱动电机。所有这些都发生在非常短的时间环路内,范围从50微秒到300微秒。
然而,运动控制通常充当系统监控器,需要在多个电机控制器之间、通过以太网(EtherCAT和TSN.)、CAN、RS485的数据等其他来源之间,以及人机界面(HMI)面板的命令之间进行通信。如上所述,运动控制器还可以参与一些电机控制任务,例如控制速度环、位置环,甚至扭矩环。因此,运动控制器的实时控制环路可以从100微秒到数百毫秒不等,具体取决于运动控制器参与的实际任务。
运动控制系统的设计
运动控制系统的设计可能相当复杂,涵盖了电机控制、工业网络、人机界面、编解码器、信息安全和功能安全等许多方面。因此,它需要多个控制单元在系统中相互协调。
这里就需要全套器件方便运动控制设计人员选择
在电机控制器方面,从使用ARMCortex-M0+内核控制简单电机,到使用Cortex-M33内核或高效DSC内核在双电机上运行FOC算法。
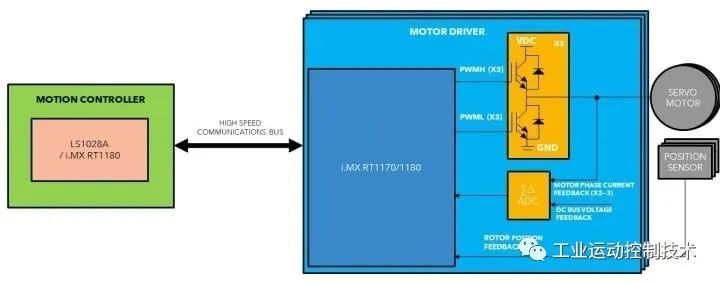
如图所示,运动控制系统可以使用大量的MCU和MPU来实现多个电机驱动器,促进各个机械臂协同运动。









