工业机器人驱控一体化系统构成,首先对机械手控制系统结构发展的认识,它主要由集中式控制方式、主从式控制方式、分布式控制方式等三种结构的形式。目前商用工业机器人控制器大部分采用以分布式控制方式为主。
传统分布式控制方式,采用伺服驱动器加电机的方案最终完成各个电机的伺服控制。因为商业的性质,各家驱动的开放性不足,制约了运动控制做到高阶性的运用。集中式的控制方式虽然可以获取充分的底层数据,实现高级控制,但是其开放性差,不便于控制器的功能扩展。因此,基于主从式控制结构的驱动控制一体化机器人系统方案提出。
驱控一体化的机器人控制系统,其相对于传统的运动控制,将伺服驱动与运动控制集于一身,两者之间可以在内部进行高速数据通信,用户在使用时可以节省大量电缆、空间,拥有着体积小、成本低、效率高等诸多优势。
驱控一体的方案最早是日本厂商应用,如东芝、三菱、YAMAHA、EPSON等,最早应用于SCARA机器人产品上。从2015年开始,中国厂商才逐渐开始驱控一体控制系统的研发,但发展至今,驱控一体已从最早的概念化阶段逐步进入产业化落地阶段,市场接受度大幅提高。华成工控也针对驱控一体化系统推出了对应的解决方案:单芯片方案、多芯片方案和总线式方案。
单芯片方案
这个是最容易理解的一体化设计方案,所有实现都在一颗芯片里面完成;
对于单芯方案来说,所有数据都在同一个芯片的数据总线上,数据的交换没有任何开销。
只是做简单的单双轴机械手控制,对芯片的要求就相对小了很多,对厂家来说,在成本控制范围之内,就有很多的芯片可供选择。

单芯片架构产品类型:单双轴注塑机械手系统、二次元冲压机械手系统等几款产品。
多芯片架构方案
因运动控制部分,要进行曲线插补、位姿补偿、机器人算法等高消耗计算;所以需要一颗高浮点性能的芯片。而伺服驱动部分,需要实时全闭环控制,高速采集和控制电压电流;所以需要一颗高实时性和数据采集能力强的芯片。

多芯架构产品类型:多轴桁架式机械手控制系统、四轴冲压机械手控制系统、四关节机器人控制系统等等,几款不同的驱控一体系统。
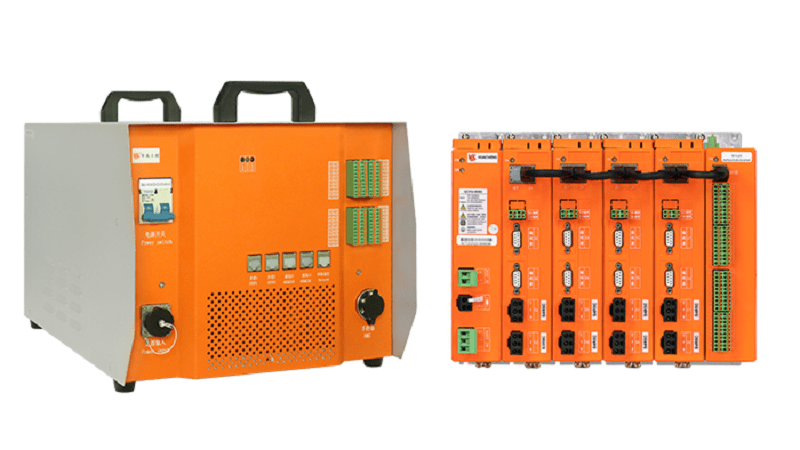
总线式方案
高速总线式架构,通过一条内部高速总线,将运动单元、伺服驱动单元、IO单元、模拟量单元等串联在一起,使数据可以在内部高速交换,达到一体化效果。相较于单芯片和多芯片的单板式方案,总线式的多板式方案,整个系统的可扩展,和可配置能力,都得到了很大提升,通配性非常好。
总线式方案的产品类型:六关节机器人控制系统、四关节机器人控制系统、八轴驱控一体控制柜等产品,整体可配置方案多,维护非常简便,适合大多数行业领域。