PLC的概念工作原理
PLC是可编程逻辑控制器(Programmable Logic Controller)的缩写,是一种用于自动化控制的电子设备。它通过特殊的编程软件,实现对各种工业过程、设备和机器的程序控制。
PLC的工作原理如下:
1. 输入模块:PLC通过各种输入模块(如传感器、按钮)来接收外部输入信号。
2. CPU:PLC的中央处理器(CPU)读取各种输入信息,根据预先设定的程序进行逻辑运算和计算,产生相应的控制指令。
3. 输出模块:PLC通过各种输出模块(如继电器、电磁阀)来输出控制指令,控制机器或设备的运行状态。
4. 编程软件:PLC的编程软件用于对PLC进行编程,包括流程设计、逻辑编辑、参数设置等。
总之,PLC的工作原理就是根据输入信号进行计算和逻辑判断,生成相应的输出控制指令,实现对机器或设备的控制和自动化运行。
伺服电机的概念工作原理
伺服电机(Servo Motor)是一种能够通过控制信号来实现精确位置和速度控制的电机。其工作原理基于控制信号和反馈信号之间的闭环反馈控制系统,能够快速、准确地响应控制信号,实现精确定位、定速和定位。
在伺服电机中,控制信号通常由PID控制器生成,将目标位置或速度与电机的实际位置或速度进行比较,根据误差大小产生控制信号来调整电机的位置或速度。同时,电机内置有位置或速度传感器,用于反馈电机实际位置或速度。将反馈信号与控制信号比较,可以实现闭环反馈控制,使电机的输出达到期望的位置或速度,并保持稳定。
伺服电机通常使用于需要高精度和高稳定性的工业控制和自动化领域,如机床、印刷机、纺织机、机器人等。
PLC与伺服电机的接线方法
PLC和伺服电机的接线方法可以分为两种情况:
1. PLC直接控制伺服电机
这种方式通常用于简单的运动控制系统,在这种情况下,PLC的数字输出口可以直接连接到伺服电机控制器的控制输入端。伺服电机控制器会接收PLC发出的控制信号,并根据信号来调节伺服电机的转速、方向和位置。
2. PLC通过运动控制卡控制伺服电机
在较为复杂的运动控制系统中,通常会采用PLC与运动控制卡相结合的方式来控制伺服电机。PLC发出的指令会先传递到运动控制卡上进行处理,然后再将处理后的指令发送到伺服电机控制器来控制伺服电机的运动。
在这种情况下,PLC需要和运动控制卡之间通过接口进行通信。运动控制卡一般提供与PLC的通信接口,可以通过RS232、RS485等通信协议与PLC进行通信。此外,PLC还需要将数字输出口连接到运动控制卡的控制输入端,从而控制伺服电机。
总的来说,PLC和伺服电机之间的接线方法需要根据具体情况选择,可以参照PLC和伺服电机的接线图进行接线。
PLC与伺服电机的电路接线图
如图所示:
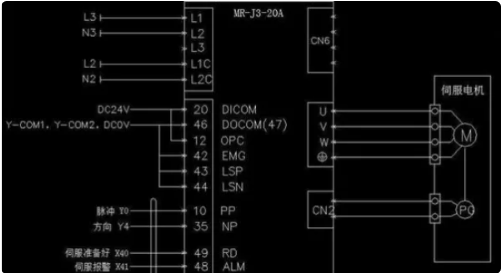
PLC与伺服电机控制接线图:PLC使用高速脉冲输出端口,向伺服电机的脉冲输入端口发送运行脉冲信号。伺服电机使能后,PLC向伺服电机发送运行脉冲,伺服电机即可运行。针对伺服脉冲输入端口的接线方式,可以依照PLC侧输出端口的方式,进行如下处理:
高速脉冲接线方式
方式1,若PLC信号为差分方式输出,则可以使用方式1,其优点信号抗干扰能力强,可进行远距离传输。若驱动器与PLC之间的距离较远,则推荐使用此种方式。
方式2,PLC侧采用漏型输出。日系PLC多采用此种方式接线,如三菱。
方式3,PLC侧采用源型输出。欧系PLC多采用此种方式接线,如西门子。