L9942反电动势堵转检测算法
1 L9942 的微步模式
L9942步进电机控制器具有全步、半步和微步模式。微步模式提供32个可编程电流调节步进,步进角度超过360°。这意味着每个象限有8个不同的电流水平。

图 1 L9942的微步模式
每一步电流都由PWM控制调节,PWM开启时间由振荡器固定,关闭时间由测量的电流设置。通过查找表将高压侧开关提供的内部电流镜反馈与预设(可编程)电流值进行比较。当相位中的电流与查找表中的值匹配时,相位将关闭,直到下一次PWM接通。因此,通过输出的PWM控制,电流正弦波以32步近似。这也适用于半步和全步操作模式。
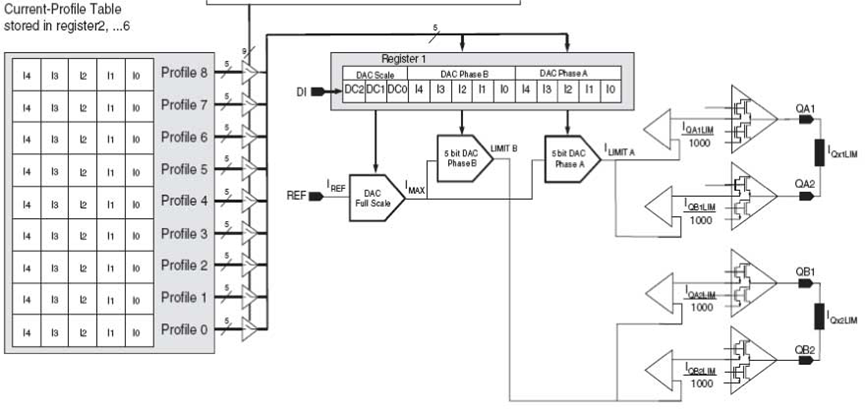
图2 L9942电流调节框图
2 通用电机概念
电机电压可以用一个由电阻、电动和电感三个分量组成的方程表示。
公式1

电阻分量(Rwindings)在确定预期的堵转电流方面起着很大的作用。当电机不旋转时,唯一限制电流的是绕组电阻。
当应用PWM信号时,电机(Lwindings)的电感被利用。当设置PWM频率时,电感会产生恒定或平滑相位的电流,以便电感在PWM关闭期间支持绕组中的电流。
BEMF是当永磁电枢在定子内部(或周围)旋转时,电机产生的电压。当转子旋转时,绕组会经历一个变化的磁场,这种变化的磁场会产生与变化磁场速度直接相关的BEMF电压。
电机中有两个普遍的概念总是正确的。第一个是BEMF与电枢速度成正比,实际上,没有其他任何概念。反电动势方程很清楚地说明了这一点:
公式2

其中:
N是线圈匝数
B代表磁场
A是电机磁场包围的区域面积
ω是角速度
请注意,N、B和A都是特定于电动机结构的常数。它们不会改变。最终结果是反电动势(EMF)与电机速度(ω)成正比。
下一个通用概念是电机转矩和电机电流之间的关系。同样,方程式清楚地描述了这一点:
公式3

其中:
N是线圈匝数
P是极数
θ是磁通量
再次注意电流(I)和转矩(T)是成正比的。还有其他影响电流的因素,如铜的温度和电阻率。铜电阻率提高了转矩电势(冷态)或限制了转矩电势差(热态),但不会改变转矩与电流的关系。
2.1 适用于步进电机的通用电机概念
步进电机通常是恒流驱动系统(译者注:原文是A stepper motor is typically a fixed current system.)。如果进入电机的固定电流产生固定扭矩,则步进电机如何在固定驱动电流、固定转速的情况下,适应各种负载和扭矩?答案是,自动调整反电动势相对于驱动电流的相位。
电流根据前面的方程产生扭矩。施加扭矩的方向取决于外部负载。对于轻负载步进电机,电机转矩仅有一小部分用于驱动负载,而很大一部分用于降低电机转速。为了永远不超过指令转速,电流首先驱动电机加速,然后制动电机减速。对于空载电机,输出轴输出的总扭矩为零。
转子位置也是转子磁场相对于定子磁场的位置指示。转子磁场固定在转子上,并随转子旋转。定子磁场与定子中的电流有关。“正”电流产生“正”磁场,反之亦然。

图3 无负载电机的BEMF相位移动
电机加载时,反电动势移动,将更多扭矩转换为向前运动。
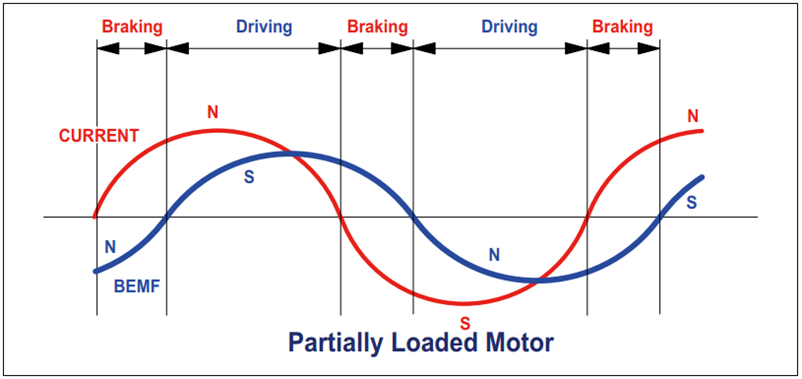
图 4 部分负载电机的BEMF相移
在部分负载的电机中,反电动势发生了变化,以增加驱动转矩占制动转矩的百分比。随着外部载荷的增加,这种变化会继续,直到载荷超过潜在扭矩能力。此时,电气旋转和机械旋转之间的同步停止,将会造成电机堵转。
下图中,在满载电机中,扭矩需求增加,在反电动势进一步移动的瞬间,输出扭矩减小,最后电机停止旋转。
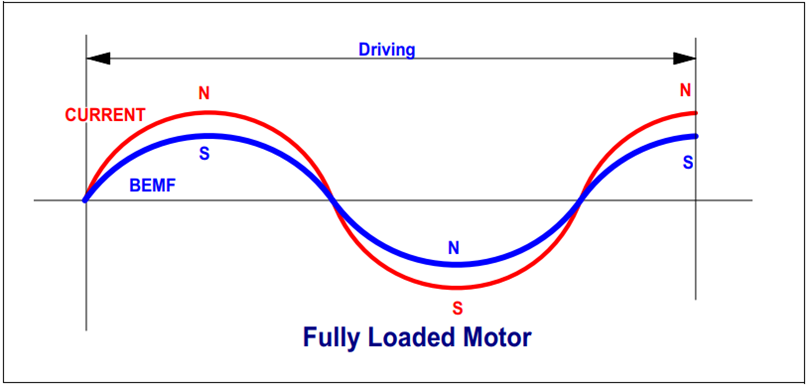
图5 满负载电机的BEMF相移
上图中注意到:注意电流和BEMF的完全对齐(译者注:指的是相位相同)。
3 LP9942堵转检测方法
3.1 电流检测
L9942具有通过查看电机电流上升时间来检测堵转的功能。
堵转期间,由于没有BEMF,电机电流升高。缺乏BEMF会产生两种影响。首先,反电动势缺失会导致电机相电阻两端的电压变大,最终导致电机绕组中的电流增大(译者注:原文为it increases the potential current in a winding at a given voltage per Ohm's law)。其次,它增加了绕组电流的变化率,因为电感中电流的变化速率与电感两端的电压成正比。在电机绕组中只有很少或没有BEMF时,电流会快速上升。
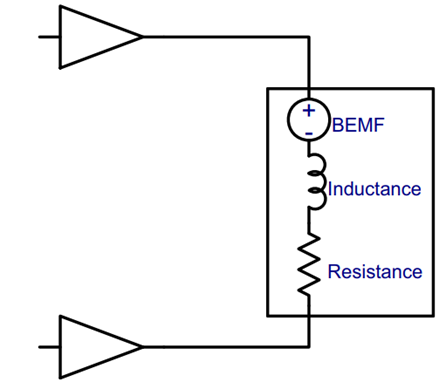
图 6 典型的电机相绕组部件
然而,L9942通过在达到预编程电流阈值时关闭相位来调节电机相电流。因此,当电机堵转时,电机电流不会产生尖峰电流(译者注:尖峰电流指的是spike)。当电流控制算法补偿BEMF的损失时,占空比减小到相当小的值。因此,L9942通过观察并报告给定指令电流的异常低占空比来检测BEMF的损失。
这种方法的困难在于,有许多与电机电流相关的参数可以在步进电机的正常工作空间内移动。温度、电池电压、负载或扭矩等因素会对电流调节占空比产生重大影响。不幸的是,正常光谱一端的工作点可能看起来像另一端的堵转电机(译者注:原文是:Unfortunately, the operating point at one end of the normal spectrum can look like a stalled motor at the other end. 没有弄懂要表达什么意思)。这些重叠的参数使得通过电流占空比来检测堵的方法测变得不可靠。
为了最小化电机电阻、电池电压和温度的影响,堵转检测算法可以直接查看BEMF。
3.2 BEMP检测说明
通过对比非堵转操作期间的一个步进电机相位的线圈电流和感应BEMF电压,可以看出电流和BEMF压力之间存在90°的相位差。

图7 反电动势和相电流
BEMF堵转检测算法利用了这一现象。当电机电流从一个极性过渡到另一个极时,有一步的电流通常设置为0A。因此,当阶跃电流为零时,检查BEMF不会干扰电机的控制。
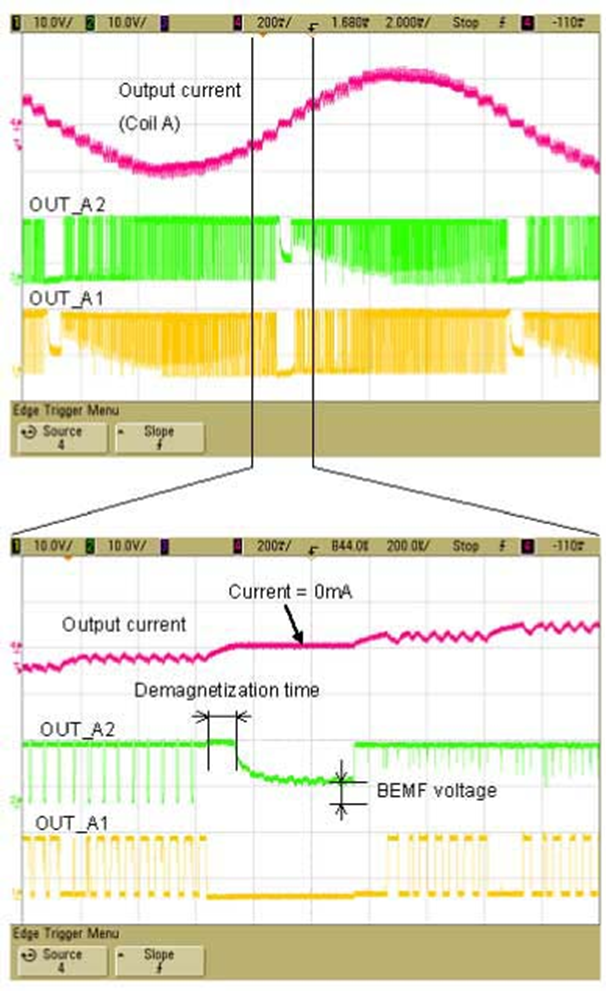
图8 主动步进电机上的反电动势波形
在电流为零或接近零的空载电机绕组中,BEMF最强。
当您考虑电机负载对BEMF相位的影响时,就会出现问题。由于此算法仅在相位未驱动时查找BEMF,因此“查找”窗口非常短。当电机加载时,BEMF移动,使其更符合驱动电压/电流。因此,电机负载给BEMF检测增加了一些变化。堵转边缘的满载电机看起来与完全堵转的电机相同。幸运的是,步进电机不打算用那么多负载驱动。
3.2.1步进电机上的BEMF
为了更容易地看到转矩对反电动势的影响,以下是一个以全步进模式驱动的电机。下图9显示了在全步进模式下驱动的空载电机。红色是电流,紫色是相位上的电压。细黑线估计反电动势。

图9 以全步进模式驱动的空载电机
在空载电机中(图9),反电动势引导相电流。这表明旋转磁场提供的能量比保持转子旋转所需的能量更多。反电动势电压的不规则形状表明在360°循环中存在旋转加速和减速。
在负载水平较高的电机中(图10),反电动势信号与实际驱动器信号更加一致。换句话说,原因和结果之间的相位差较小。如果负载增加到一定水平以上,则在驱动电机时可能会出现阶跃损耗。

图10 以全步进模式驱动的负载电机
使用步进电机的系统会大幅度过驱动电机(译者注:这里指的是在额定电流下,驱动电流对应的转矩要大于负载,且要留有较大余量),以确保在所有正常操作条件下不会堵转。
3.2.2 堵转电机上的BEMF
将图9和图10与堵转转子波形(图11)进行比较,说明堵转电机和运行电机之间的差异。同样,这些数字是使用全步进电机完成的,以更好地说明这些条件下的BEMF。
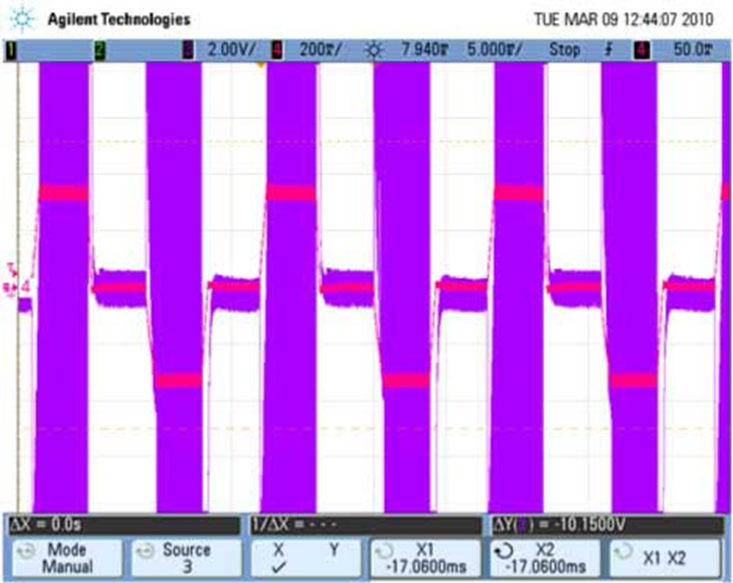
图11 硬堵转模式下的电机
图11显示了在非驱动间隔期间几乎没有反电动势。这是可以理解的,因为BEMF是转子运动的直接结果。如果堵转转子中有一些移动,则可以看到BEMF(图12)。图12显示了“松散”堵转电机中BEMF的不规则性质。
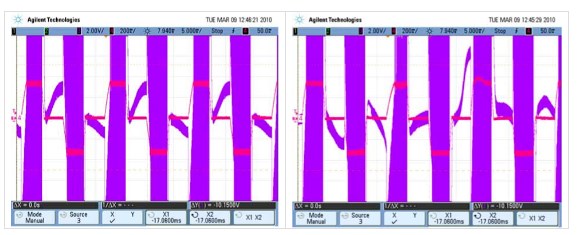
图 12 电机堵转但允许“振动”的两种情况
将这些波形与之前的运行波形进行比较,我们可以看到有些重叠。当然,图12显示了全步进模式驱动电机的行为。
4 BEMF检测的统计学分析
以下简化框图(图13)说明了微步进模式下给定电机的BEMF检测系统。该系统与步进电机相位同步检查BEMF。
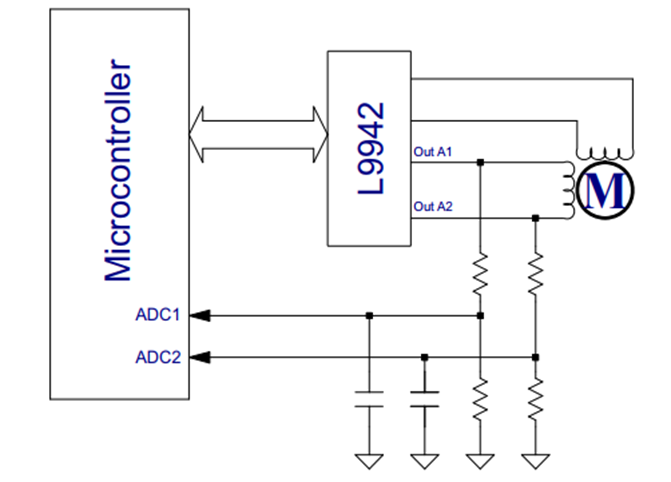
图 13 反电势检测电路的简化框图
通过微处理器模拟数字采样,可以在短时间内获得数千个BEMF读数。根据该信息生成了值的直方图。这提供了对预期的理解。
对于以下直方图,如图所示,使用了L9942和8位微控制器。L9942的步进时钟频率设置为2 kHz,微步进模式下的峰值电流设置为400 mA。
每个ADC样本都是在零电流步骤结束时采集的。这确保了最一致的BEMF读数。

图14 20℃下空载电机的BEMF直方图
其中:
检测到的最小BEMF电压=3.6 V
检测到的最大BEMF电压=6.6 V
平均检测到的BEMF电压=4.7278 V
标准偏差=0.2007 V
现在比较堵转转子BEMF和运行中的BEMF。
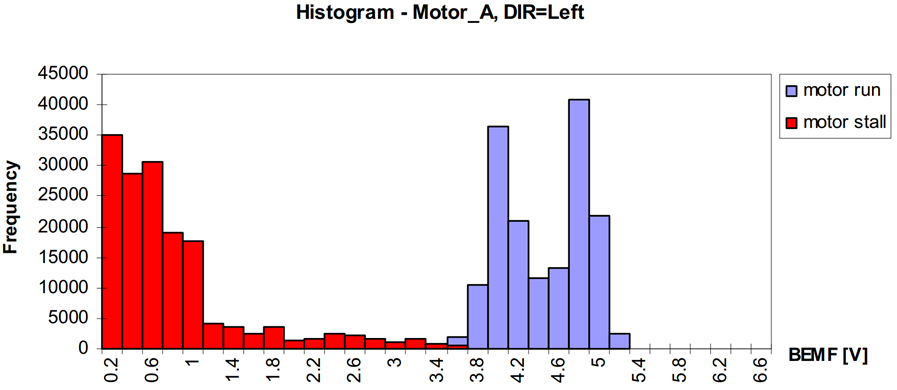
图15 空载和堵转电机在热态和冷态下的组合直方图
从图中可以看出,有些情况下,堵转转子的BEMF与运行的BEMF值重叠。这只是由于转子振动导致BEMF高于零。从统计数据来看,这种重叠是最小的,因为大多数情况下,BEMF比平时低得多。
在这个例子中,BEMF阈值被设置为大约2 V。由于绝大多数堵转转子的BEMF测量值都远低于这个水平,因此使用该阈值可以进行可靠的检测。如果您查看有效检测此电机堵转所需的时间,我们发现独钻可以在电机的一个机械旋转内检测到。
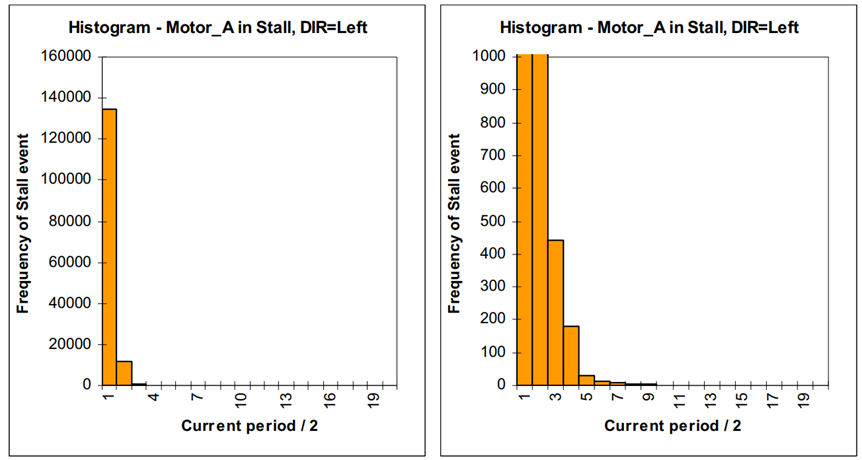
图16 一台电机堵转检测时间直方图(右侧是左侧的缩放比例)
“电流周期”是指进行一次360°电旋转的持续时间。在本例中,转换为以2 kHz或16 ms的频率步进32次。在10个半周期或80 ms内,100%的时间检测到堵转。
5 限制
这些情况比较了空载电机和堵转电机。这两种状态之间的差异是显著的,并且很容易察觉。从上述分析中,我们可以看到,当BEMF移动与电流更加一致时,负载电机会导致检测到的BEMF阈值下降。在考虑可接受的堵转阈值时,必须考虑这种下降。对于每个应用,都有一个应用的最大预期扭矩要求。在确定BEMF堵转阈值时,必须考虑该最大扭矩要求。
其他可能限制这种方法的因素包括传动装置松动或松软,或转子“弹跳”的“软”堵转。在当前占空比方法中,这些限制更难克服。由于BEMF检测是在IC外部进行的,因此可以通过识别堵转阈值的统计方法在一定程度上克服这一限制。
6 总结
用于检测堵转的BEMF方法可靠且经济高效。该方法使用随时间或温度变化很小的电机参数。因此,它克服了更传统的电流/占空比检测堵转检测方法中的许多限制。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。