在去年的 11 月和 12 月期间,我们基于新出行全新的 GAMP 评级体系做了两期关于 LCC 辅助驾驶的大横评,其中测试项目也是选取了我们日常出行经常碰到的各种场景,对两期共 13 台热门车型进行了模拟测试,但是能够获得高分的选手并不多。
恰巧在前段时间,“缺席”了我们两期大横评的哪吒汽车也发布了他们自研的 NETA PILOT 智能驾驶系统内测演示视频,我仿佛又看到了能够在我们大横评中拿高分的选手。
但很可惜的是,目前哪吒这套系统还处于内测阶段,暂时也无法对其进行测试。那么此次我们就先从这个演示视频里“窥探”一下这套系统的实力吧!
一、 哪吒智驾系统解读:犹如老司机?
哪吒 S 已经开始交付了,但目前的智驾系统还没开始 OTA 推送,不少网友都在好奇哪吒 S 的智驾能力究竟如何?
在此前哪吒也是发布了一段 16 分钟的演示视频,向我们展示了内测版本 NETA PILOT 智能驾驶系统点到点的智驾能力,途径繁忙的市区路段、高速、匝道、停车场的一个综合场景。
这也是哪吒首次向外展示其完整的辅助驾驶功能,包括高速领航功能,那它有什么实力能够在我们 LCC 辅助驾驶大横评中获得的高分?就让我们来看一下吧。
1、SR 模拟显示
SR 模拟显示大家听起来可能会有些陌生,这个功能其实就将智能驾驶感知、定位系统、高精度地图、高清渲染画面进行融合模拟。
在开启辅助驾驶功能的时候,SR 模拟显示就能显示车辆周围的视角、环境模拟、限速指示和施工提醒等等信息,通过对风险场景准确识别,清晰的分级接管提醒,这样一来,就能让驾驶员实时了解车辆周边状态,不错过最佳接管时机,安全有保障。
而目前拥有辅助驾驶的主流车型在这一块的表现却乘次不齐,只有少部分的“头部玩家”拥有一个比较完善的 SR 模拟显示。
 Model 3 能够识别雪糕筒
Model 3 能够识别雪糕筒

极氪 001 无法识别雪糕筒
通过哪吒此次发布的演示视频来看,哪吒这套智驾系统的 SR 模拟显示也比较丰富,与“头部玩家”基本处于同一水准。能够显示车辆周围 360° 的视角,侧方、后方、侧后方的车辆都能识别得到,在主动变道时也会更有信心。

此外,对于人、车、障碍物、限速提醒等等复杂元素也都做到了一个比较完善的分类以及识别,所显示的数量、范围以及精准度也都是一线水准。

大巴和穿行电单车重叠,SR 模拟显示也能识别的出来

能够识别长列的雪糕筒
上了高速开启了领航辅助后,哪吒这套智驾系统也会将高精地图数据与感知数据进行融合,并清晰的呈现在中控大屏上。除了周围的车辆识别外,道路外的高楼、山川、河流等等也都有显示,既直观也美观。

当然,在视频里也能看到,哪吒这套 SR 模拟显示还有有待优化的地方,由于数据量上还不够大,导致渲染模型不够稳定,时不时能看到不少频繁抖动的渲染模型,期待在后续正式版上能够获得优化。
2、过无标线路口
无标线过路口这个场景在我们 LCC 辅助驾驶大横评里被分为了一个单独的测试项目,我认为也是辅助驾驶系统绕不开的一个场景。
在这个场景当中也能看出一个智驾系统的应对逻辑,主要的逻辑也分为三种:第一种是过路口直接退出,第二种是能够跟车通过,第三种是能够沿着当前的车道线做模拟延长,通过自身能力通过路口。
而通过视频来看,哪吒 S 这套智驾系统应该采用的是跟车过的一个应对策略,随前车的轨迹经过路口。虽然没有做到能够第三种的应对逻辑(场景太少,可能没展示出来),但整体表现也比较不错,并没有出现跑偏车道或者方向不稳的情况,稳稳跟住前车通过路口。

并且在视频里还看到,这个无标线路口还不是一个规整平直的状态,会带点错位,对于软件算法上还是有一定挑战的,而哪吒 S 能够随前车平稳通过,也证实了它的能力。

在正式版本落地后,我也期待哪吒这套智驾系统能够将在这个场景上做进一步提升,不管是跟车还是无车的状态都能通过自身感知能力通过。
3、高速领航:高速领航效率变道逻辑
在演示视频当中,哪吒汽车也首次展示了其高速领航功能,那么它在细分场景下的所表现的逻辑以及应对能力如何?那么就让我们来看看吧。
首先在高速领航的变道逻辑上,大致也被划分为「车道选择」、「遇慢车道变道积极性」以及「是否有效变道」三大逻辑,这三大逻辑的设定也很大程度会影响高速领航的体验。
而在「车道选择」的逻辑上,哪吒这套智驾系统也并非使用相对简单的策略逻辑,而是会根据两侧车道的车流动向进行选择通行效率更高的车道。比如右侧车道的车流速度会优于左侧车道的话,那么车辆就会优先向右侧进行变道超车。

对比友商的高速领航「车道选择」来看:小鹏和特斯拉优先向最左侧超车变道,蔚来则是优先向最左侧或者中间车道进行超车变道。单单从视频来看,哪吒这套智驾系统确实也做到了体验上的差异点。
其次在「遇慢车道变道积极性」上,哪吒这套智驾系统的整个积极性策略也较为适中,并没有太过激进的去频繁变道,而是类似于观察好两侧车流的动向后,再进行变道超车,这样的应对逻辑我认为也更为安全以及效率。

不过,通过视频也能够看到,当准备变道的车道后方有来车的时候,哪吒这套智驾系统往往会对其进行取消变道的操作,即使后方车辆还有一定距离,还是会进行取消,策略会偏向于保守一点。
当然,这样的策略逻辑我认为并不是缺点,毕竟在目前国内复杂的道路环境下,优先确保行车安全的前提下,再进行“辅助”,我认为正确的。
最后就是「是否有效变道」的通过性,那么在视频当中其实并没有太多的片段能够完全的看出哪吒这套智驾系统的全部能力,仅仅从部分的片段来说,哪吒这套智驾系统在自主变道上,大部分都是有效的变道动作,在选择车道以及变道时机上确实会像人为驾驶的逻辑。

4、高速领航:变换匝道
在变换匝道方面,这也是领航功能的一个最基本的“功能”,在变换高速公路的时候必须会遇到的一个常见场景。而这个场景不仅仅考验车辆的变道能力,还有汇入主路的时机把握。
通过视频来看,哪吒 S 在这个内测阶段下基本也能够做到一个不错的表现。在出主路进入匝道前,哪吒这套智驾系统都能提前 1.5-2km 变到最右侧车道,为进入匝道做好准备。

并且在进入匝道后,能够识别匝道的限速情况,对其车辆自行调节限速值。

在出匝道汇入主路的时候,哪吒这套智驾系统也能自动完成汇入主路的动作,基本不需要人为干预。不过从视频也看出了一些细节上的小问题,那就是在变道时机上会较晚,汇入主路时已接近匝道尽头,人为操作一般是在安全的前提下会尽早的汇入主路。当然,也不排除是道路原因,此处汇入匝道较短导致的。

5、高速领航:大曲率弯道
在通过大曲率弯道时,需要根据弯道的曲率变化,不断的修正自己的转向角度,这种修正是要有预判性的,即使是人为驾驶,在开车技术不熟练的新手司机上也会出现压线、画龙,甚至撞路边的事故。
而目前大多数辅助驾驶都是以视觉为主导来识别弯道曲率,而越曲率越大,视角就越窄,而这就很考验智驾系统的横向识别能力以及软件算法的能力,这也是我们大横评中重要的考核标准。
那么在视频当中也有一个大曲率弯道的场景,哪吒这套智驾系统的表现也比较不错。从视频来看,哪吒 S 在以 50km/h 左右的时速通过弯道,在弯道中哪吒这套智驾系统能够以一个比较稳定的车身姿态以及较为居中的情况行驶,基本没有出现让驾驶员不安的动作。


不过从视频也能看到方向盘在弯道当中会不断地进行修正,这种情况其实也比较常见,在我们 LCC 辅助大横评当中大部分车辆,甚至是智驾头部玩家也是会出现这种情况,我也期待哪吒这套智驾系统在正式版上能有优化和突破。
最后总结一下,从哪吒这次发布的智驾演示视频也能够看出哪吒智驾团队对于他们自身研发的考虑,安全为前提下进行“辅助”,以及在功能层面上的研发进度。
从一整套 SR 模拟显示、LCC 功能以及高速领航功能上,基本处于一个预量产阶段,在常规工况下都能轻松应对,并且也会以用户安全为主要导向。不过,在一些细节点的打磨上还需要更加优化,这样才能为用户打造出一个体验感更好的智驾系统。
此外,就是在一些复杂或者特殊场景上,在视频当中并未看到,所以我们也相当期待这套系统实装的那一天,为大家带来更加细致的体验和系统性评价。
二、点到点的全栈自研辅助驾驶解决方案
除此之外,除了这次智驾视频公开外,哪吒也是开展了一系列的技术沟通会,这也让我们获得了与技术人员面对面交流的机会。
在沟通会当中也得知了目前哪吒品牌以及哪吒 S 车型在智驾方面的阶段性进展。
首先作为当担代表——哪吒 S 目前也是提供了 8 款配置车型,但是智能驾驶辅助层面却分为两种版本:
基于德州仪器双 TDA4 域控制平台+环境摄像头*7 + 环视摄像头*4 + 毫米波雷达*5 + 超声波雷达*12 硬件组合打造的NETA PILOT3.0。
基于华为 MDC610 域控制平台+ 环境摄像头*7(含两个 800 万前视)+ 环视摄像头*4 + 毫米波雷达*5 + 超声波雷达*12 + 激光雷达*2 硬件组合打造的 NETA PILOT4.0。


NETA PILOT3.0 系统的整套硬件水平也是目前市场上主流的一个配置,其能够实现 L2.5 级的智驾功能,包括常规的 LCC/ACC 功能、高速领航辅助、记忆泊车等等,已经满足了大多数对于车辆智能驾驶层面的需求和实用场景,高度普及让更多消费者体验到智能驾驶辅助带来的乐趣。
而 NETA PILOT4.0 则是满足了未来 3-5 年持续迭代的硬件需求,拥有更高算力以及激光雷达的加持,除了可以实现高速领航辅助外,还可以实现城市领航辅助,让消费者享受到更加智能的驾车体验。
当然,两个版本也是针对使用场景和用户群体进行会有一定划分,最大程度满足了消费者的需求以及价格上的选择。

虽然硬件部分来自供应商,但是哪吒 S 的软件层面采取的是全栈自研的解决方案,这样做的好处不只是不受制于人,同时核心算法自研和数据闭环,也能更快的驱动产品快速迭代,提升智能驾驶系统的体验。

针对具体的智驾功能,哪吒也放出了覆盖全场景使用下的点对点解决方案。即从起点到终点,能够覆盖城市场景、高速场景、隧道、城市主干道、支线路等等。
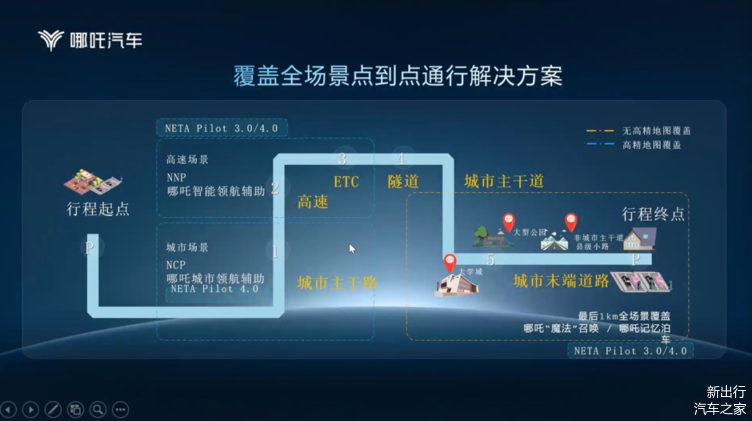
其中前面也说到,NETA PILOT3.0 和 NETA PILOT4.0 由于硬件不同,所实现的场景也不同。NETA PILOT3.0 所能实现的场景还是在于实用场景,比如高速、泊车等场景,而 NETA PILOT4.0 则能够额外多出城市领航辅助的功能。
针对使用场景不同,用户也能很清晰选择出适合自己的车型,也不需要额外对不常用的功能或者硬件买单。



那么根据官方最新消息表示,哪吒 S 将在 2023 年上半年通过 OTA 升级,NETA Pilot 3.0/4.0 系统正式上线高速领航辅助功能。2023 年下半年将上线记忆泊车以及魔法“召唤”功能。而 NETA Pilot 4.0 的城市领航辅助则是 2024 年进行一个推送。

当然,这只是对于主体上的智驾功能规划,在此期间肯定还会有不定期的 OTA 升级,对其常规的辅助驾驶功能、座舱、驾驶体验等等升级优化,还是挺期待的今年哪吒的 OTA 之路的。
最后回到产品层面,在目前的电轿市场里,哪吒 S 在价格、体验、性能、座舱等方面都可圈可点。而随着 NETA PILOT 智能驾驶系统的推送、下放,哪吒 S 在智驾层面也会实现质的突破,成为一个真正的六边形选手。甚至依托这套系统,哪吒未来的每款产品都能实现一个高智能化的水平。
此外,我也期待哪吒 S 能够带着这套智驾系统出现在我们后续的 LCC 大横评当中,与其他车企的智驾系统实际“碰一碰”,看看它到底实力如何。









