学术界圣地,给国内自动驾驶一席之地了!
CVPR 2023 正式公布最佳论文等重磅奖项。来自上海人工智能实验室、武汉大学、商汤科技团队联合发表论文Planning-oriented Autonomous Driving(以路径规划为导向的自动驾驶)实现自动驾驶技术的重要突破,获CVPR最佳论文。
国内自动驾驶,真的出息了!
一觉醒来,还没来得及吃口热乎粽子,就看见一条堪称爽文的热乎新闻:
在2023年,CVPR大会的论文投稿总量达9155篇。其中,商汤科技及联合实验室共有 54篇论文被CVPR 2023接收,包含一篇最佳论文、一篇最佳论文候选,以及七篇Highlight论文。
论文题目:Planning-oriented Autonomous Driving
论文地址:https://arxiv.org/abs/2212.10156
在近万篇论文中,上海人工智能实验室、武汉大学、商汤科技联合团队研究成果Planning-oriented Autonomous Driving(以路径规划为导向的自动驾驶)最终脱颖而出,获CVPR 2023最佳论文奖(Best Paper Award)。
(划重点)要知道这个国际奖项已经颁了40年,但以自动驾驶为主题的论文获奖可是第一次!
另外参与CVPR评选需要和全球各地的顶尖学者来一套“过五关斩六将”,拿了这个奖堪称为国争光(进度条:已击败全球99.99%学者/学术机构)!
平复激动的心情,接下来咱们就聊聊这个获奖的事儿。
首先这个颁奖机构用一个词来形容,就是顶级(到能让一个研究生原地毕业)。
CVPR一年举办一次,是计算机视觉领域的全球级会议。要想知道一个会议有多少含金量,看业内人的关注度就懂了,CVPR的隆重程度:从1983年开始,每年吸引着全球各地的学术大牛们来参与,近几年投稿量都近万篇,即使这些天之骄子总是第一轮就会被刷掉3/4。

当然这可不是什么镀金的手段,这个会议凭借着高质量和低成本,它为众多研学者提供着教科书般的行业价值。目前在中国计算机学会推荐国际学术会议的排名里,CVPR为人工智能领域的A级会议。
除了水平认证,CVPR回报给这些学者们最重要的是尊重和公平。在初次筛选中,评审们给出的选择不是通不通过,而是细致到“非常接受”、“接受”、“差不多”、“拒绝”、“非常拒绝”。
同时评审们不属于CVPR机构组织,对手里的稿件都是盲审。最关键的是,稿件不允许出现任何能显示作者信息身份的元素(怀疑定这个规矩的人参加过我们语文高考)!所以评审们和作者都不知道彼此是谁!因此,最后脱颖而出的作品都是用实力经过细审,没什么运气的成分。
话说咱们国内智能车现在发展的如火如荼,也不知道当时有没有评审猜中过这篇论文的归属地。话不多说,接下来咱们就来看看这篇论文是靠什么获得国际认证的。
我们人类开车时的思路通常是“堵车了,我得刹停”,而自动驾驶车的思路则是“感知前方障碍物的时速和距离、系统算法判断场景需求决定刹车、牵动制动系统”。显然,如果自动驾驶系统将流程整合起来会带来更丝滑、BUG更少的体验。
这篇以自动驾驶为主题的论文就是从此角度切入问题,核心在于首次提出感知决策一体化的自动驾驶通用大模型UniAD。UniAD将检测、跟踪、建图、轨迹预测,占据栅格预测以及规划,整合到一个基于Transformer的端到端网络框架下。
不用觉得复杂,我们挑取2个重点词“检测”、“规划”,也就是说这个框架在环境中可以直接给出相应的指令。
UniAD将各任务通过token(最小单位)的形式在特征层面,按照感知-预测-决策的流程进行深度融合,使得各项任务彼此支持,实现性能提升。在nuScenes数据集的所有任务上,UniAD都达到 SOTA 性能。
融合五大核心模块,解决自动驾驶“规划”难题
为什么之前的自动驾驶系统做不到呢?
现有的自动驾驶系统可大致归为三类:
(a)模块化组成的系统;
(b)多任务模块架构的系统;
其中传统的端到端算法可分为:
(c.1)基础的端到端算法,直接从传感器输入预测控制输出,但是优化困难,在充满复杂视觉信息的真实场景中应用面临较大挑战;
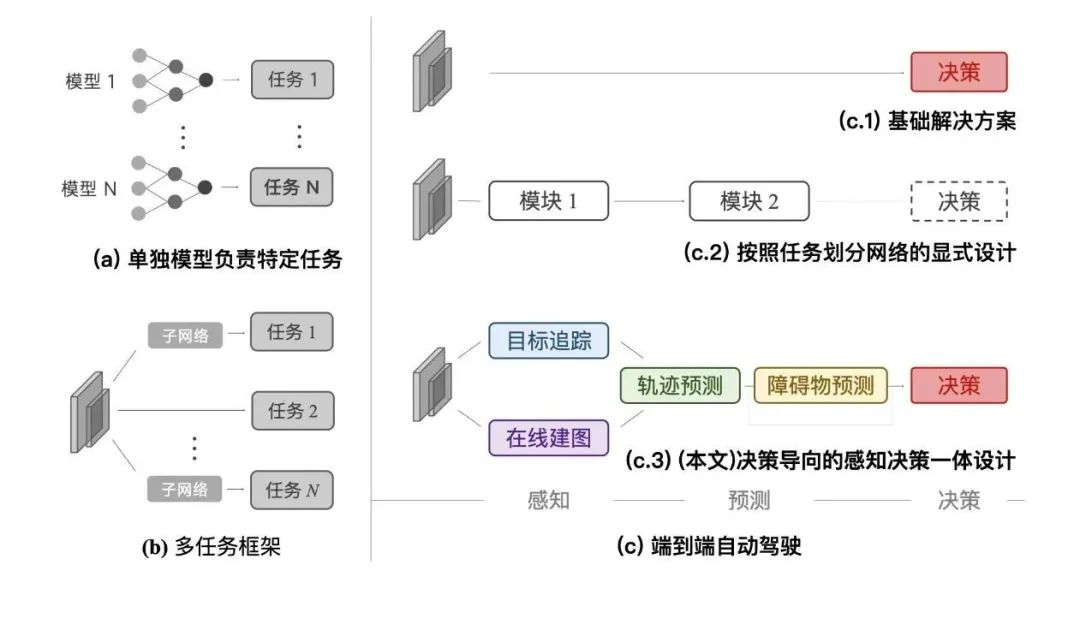
最为常见的是模块化组成的系统架构,或者部分模块组成多任务架构,他们都以优化部分性能为核心,比如检测性能(检测准确度)、预测性能(预测准确度)。
以上一些算法的BUG总结起来其实就是流程琐碎,一损俱损。这和当下智驾方案都急着摆脱高精地图的原因有点类似。毕竟依赖高精地图的话,哪怕硬件、算法再好,只要地图有偏差,整套方案直接崩盘。所以大家都在做“简化和收纳”。
而端到端自动驾驶系统,以UniAD自动驾驶通用大模型为代表,将检测、跟踪、建图、轨迹预测、占据栅格预测以及规划五大模块融合,以最终的驾驶性能为目标,从解决实际问题出发,例如提升规划出来的车辆行驶轨迹的安全性。
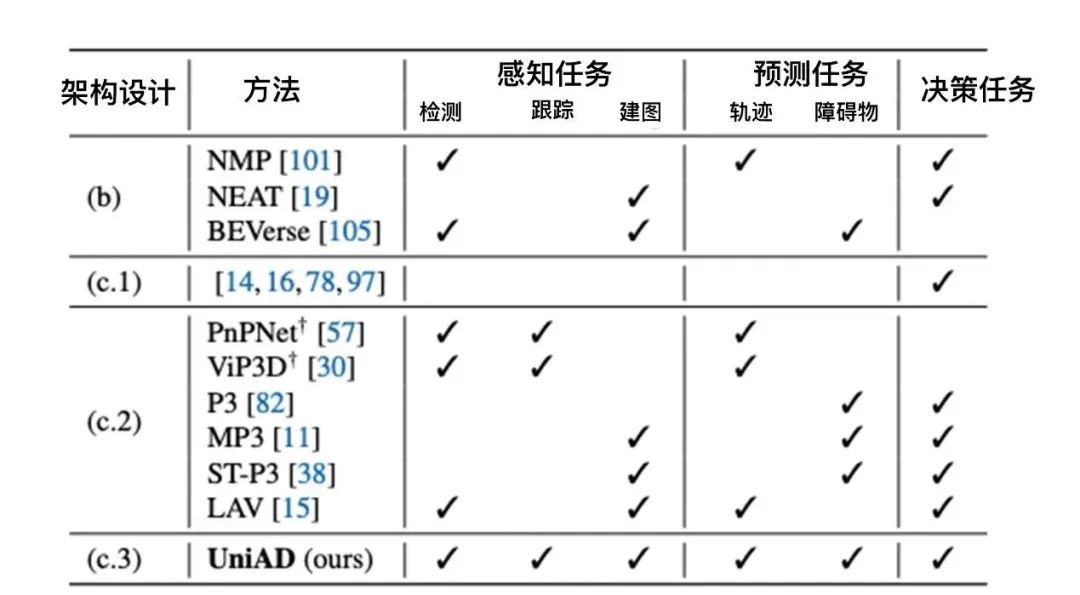
现在行业中大多数端到端(End-to-end,E2E)的自动驾驶系统,由于没有很好的网络框架来融合全部五大模块,都只能融合部分模块。
UniAD通过将环视的图片以Transformer映射得到BEV的特征,同时进行目标的跟踪,在线的建图,包括目标轨迹的预测,还有障碍物的预测,最终实现驾驶行为。环视一圈,现观察现预测,然后决定怎么行动,听起来是不是有人类开车的味儿了?
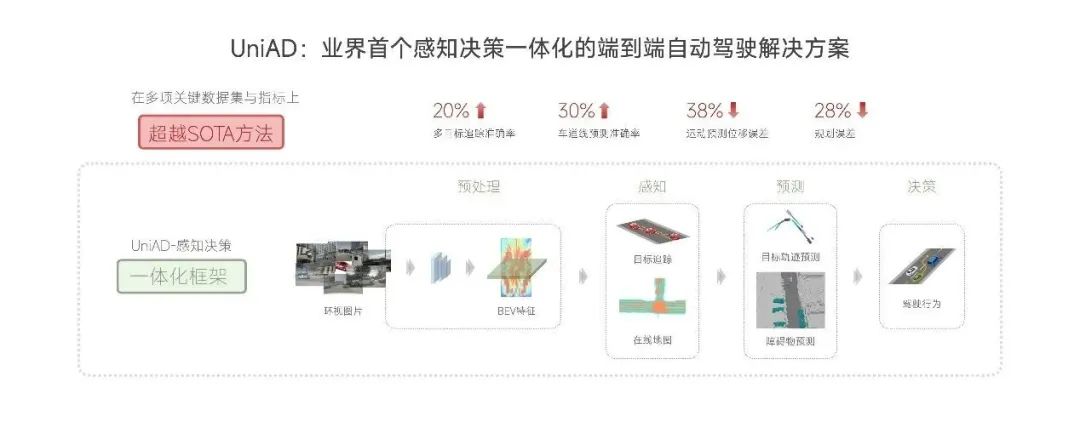
据商汤科技联合创始人、首席科学家王晓刚表示,UniAD可以做到“多目标跟踪准确率超越SOTA 20%,车道线预测准确率提升30%,预测运动位移误差降低38%,规划误差降低28%。”
下面展示了UniAD在数据集nuScenes上多个复杂场景下的优势。
UniAD 感知到左前方等待的黑色车辆,预测其未来轨迹(即将左转驶入自车的车道)和未来的occupancy,推算继续前行有碰撞风险,并立即减速以进行避让,待黑车驶离后再恢复正常速度直行。
得益于 UniAD 的地图分割模块与规划模块的深度交互,规划模块基于道路信息作出判断,向前行驶时依据道路结构适时地转弯。
在视野干扰较大且场景复杂的十字路口,UniAD 能通过分割模块生成十字路口的整体道路结构(如右侧 BEV 图中的绿色分割结果所示)和周围车辆的轨迹,由基于注意力机制的planner完成大幅度的左转。

在夜晚视野变暗的情况下,由于需要继续直行至下个路口左转,UniAD 能感知到前车停止且左右均有障碍物,所以先静止,待前车行驶并再前行并左转。
虽然现在自动驾驶的目标还是赶紧追上人类,但是不得不说有些场景中大模型观察环境比我们都更加全面细致,以下案例,展示了UniAD在国内真实场景的实际演示效果。

在拥堵路段上,UniAD能感知到前方大车的停车和启动状态,做出相应的减速和加速决策,保持足够的安全距离。

得益于地图重建任务,UniAD在路口和曲折道路上,也可以做出符合道路曲率的路径规划。
自动驾驶多模态大模型发展和落地
在学术圈大家都认这么一个理儿:不能落地的论文得再好的奖也没有价值。这篇《以路径规划为导向的自动驾驶》用几千字提出了UniAD 这项自动驾驶技术,为产业发展拓展了一个新的方向。实际上,它的创造者已经在努力将这些价值落地了。
作为创作者之一的商汤科技,一直致力于自动驾驶技术领域的研究和发展布局。例如在今年上海车展上,商汤展示了广汽埃安AION LX Plus、哪吒S等车型搭载商汤绝影智能驾驶方案的落地成果。
王晓刚将这些成果归功于商汤持续建设打造“大模型+大装置”技术路径,以及在自动驾驶行业长期深耕的积累与实践,并表示未来将沿着多模态大模型的道路,去进一步推动自动驾驶的进步。
所以这篇论文不只是学术上一次舌战群儒的胜利,更关键的是它将成为自动驾驶大漠台多模型落地的标志,继续发挥它的应用价值,去推动实现更高阶的自动驾驶人工智能。期待国内自动驾驶行业再次实现击败全球99.99%对手的进度条!
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。