基于51单片机理解SG90舵机原理并用按键控制
具体功能实现
当按下开关时,舵机的角度分别运行到0°,45°,90°,135°,180°,0°(最后停止位置),其中每转动一个角度时间延时1s。
器件:
AT89C52,sg90舵机,三根杜邦线公对母,两支按键

转动角度展示图:
转动至45°
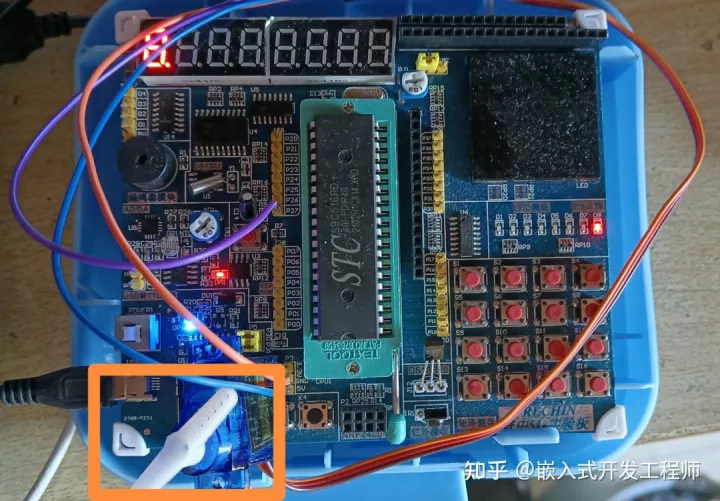
转动至180°
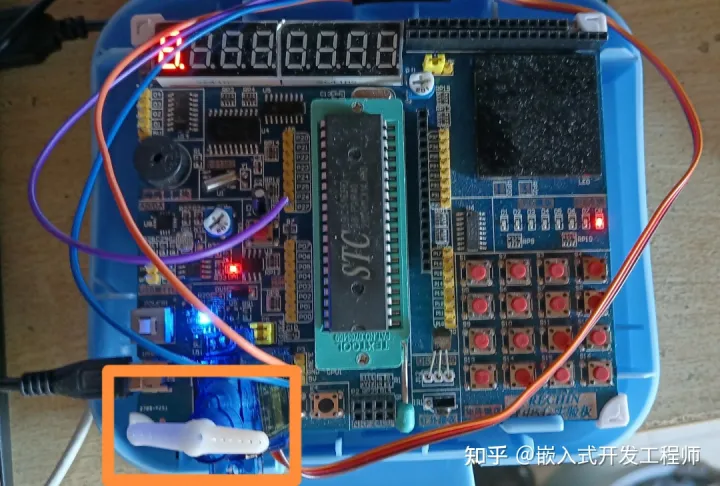
转动至90°

知识介绍:
sg90舵机简介
由直流电机、减速齿轮组、传感器(可变电阻)和控制电路组成的一套自动控制系统。
直流电机是一圈圈转动的,舵机只能在一定角度内转动(有最大旋转角度比如:180度),不能一圈圈转。
外部中断:
STC89C52有4个外部中断;
STC89C52的外部中断有两种触发方式:
下降沿触发和低电平触发
下降沿触发:当按键按下不松手时只触发一次
低电平触发:当按键按下不松手时会持续触发
中断号:
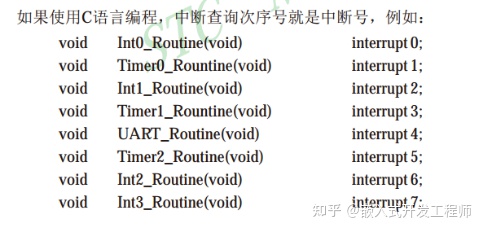
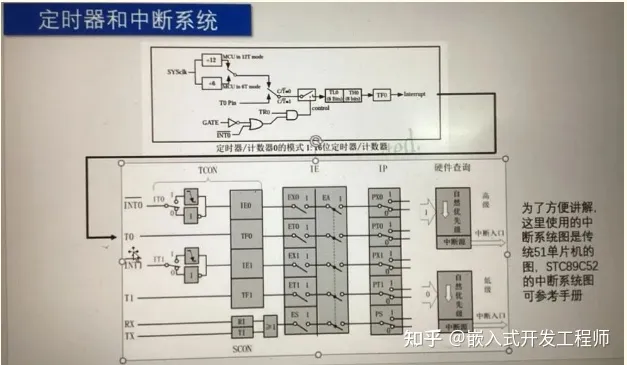
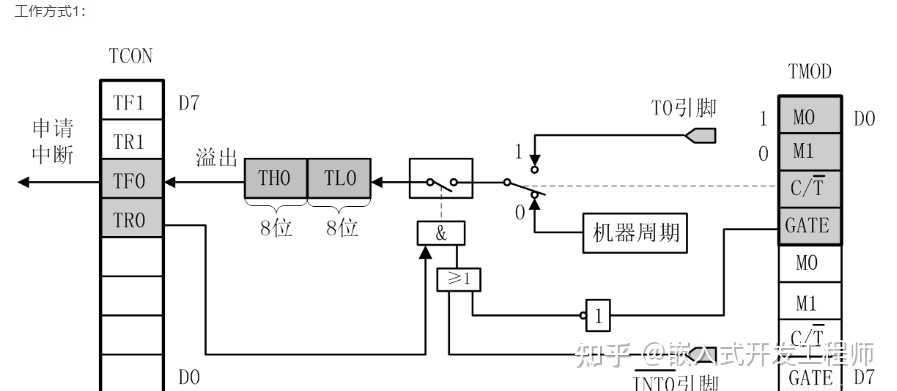
由定时器和中断系统这张图来分析,可以得到定时器0的初始代码如下:
void Init_Timer0()
{
TMOD = 0x01;
TL0 = 0x33; //设置定时初值
TH0 = 0xFE; //设置定时初值
EA = 1;
ET0 = 1;
TR0 = 1;
PT0 = 1;
TF0=0;
}
PWM脉冲宽度调制定理
PWM(Pulse Width Modulation)即脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速、开关电源等领域
PWM重要参数:
频率 = 1 / TS 占空比 = TON / TS 精度 = 占空比变化步距


例子:在制作LED呼吸灯时,如果想要让LED亮的时间更长,只需要提高比较值。
sg90舵机接线图
舵机的输入线共有三条:
红色线——电源正线(需接5V电源才能驱动)
棕色线——电源地线
黄色线——信号线(本项目使用P2^7端口)
sg90舵机控制原理
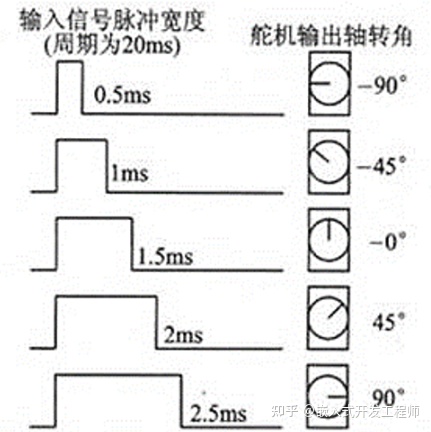
本文采用的是定时器0来计时,初始值设为0.5ms,每次定时器溢出是0.5ms,设置一个计数值count=0,每一个0.5ms count都会自增1,加了40次就20ms,是舵机控制的一个周期。
所以0.5ms是自增一次,1ms是自增两次,1.5ms是自增三次,2ms是自增四次,2.5ms是自增五次。
主函数代码(C语言)KEIL5实现:
无按键自转代码:
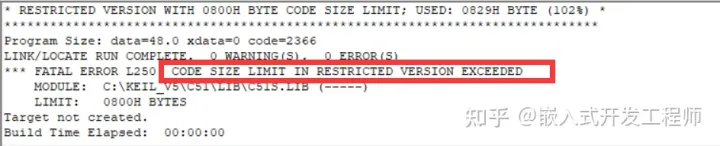
#include sbit Sg90_com = P2^7; unsigned char compare=0,count=0; //compare比较值控制占空比大小,控制舵机转动的角度 void Delay1ms(unsigned int num) //@11.0592MHz { unsigned char i, j; while(num--) { i = 2; j = 199; do { while (--j); } while (--i); } } void Init_Timer0() { TMOD = 0x01; TL0 = 0x33; //设置定时初值 TH0 = 0xFE; //设置定时初值 EA = 1; ET0 = 1; TR0 = 1; PT0 = 1; TF0=0; } void main() { Init_Timer0(); while(1) { compare = 1; //0度 Delay1ms(1000); compare = 2; //45度 Delay1ms(1000); compare = 3; //90度 Delay1ms(1000); compare = 4; //135度 Delay1ms(1000); compare = 5; //180度 Delay1ms(1000); } } void Timer0_Rountine() interrupt 1 //每次定时器溢出时是0.5ms { TL0 = 0x33; //设置定时初值 TH0 = 0xFE; //设置定时初值 count++; //PWM控制 if(count < 40) //每一个0.5mscount都会++,加了40次就20ms,是舵机控制的一个周期 { if(count < compare) //通过比较值控制高电平占据周期的时间,也就是占空比大小 { Sg90_com = 1; } else { Sg90_com = 0; } } else //count加到40后清零 { count = 0; Sg90_com = 1; } } 按键自转代码: #include sbit Sg90_com = P2^7; sbit key1 = P3^1; //独立按键1 sbit key2 = P3^0; //独立按键2 unsigned char compare=0,count=0; //compare比较值控制占空比大小,控制舵机转动的角度 void Delay1ms(unsigned int num) //@11.0592MHz { unsigned char i, j; while(num--) { i = 2; j = 199; do { while (--j); } while (--i); } } void Init_Timer0() { TMOD = 0x01; TL0 = 0x33; //设置定时初值 TH0 = 0xFE; //设置定时初值 EA = 1; ET0 = 1; TR0 = 1; PT0 = 1; TF0=0; } void main() { Init_Timer0(); while(1) { while(key1==0){ compare = 1; //0度 Delay1ms(1000); } while(key2==0){ compare = 5; //180度 Delay1ms(1000); } } } void Timer0_Rountine() interrupt 1 //每次定时器溢出时是0.5ms { TL0 = 0x33; //设置定时初值 TH0 = 0xFE; //设置定时初值 count++; //PWM控制 if(count < 40) //每一个0.5mscount都会++,加了40次就20ms,是舵机控制的一个周期 { if(count < compare) //通过比较值控制高电平占据周期的时间,也就是占空比大小 { Sg90_com = 1; } else { Sg90_com = 0; } } else //count加到40后清零 { count = 0; Sg90_com = 1; } } Q1:代码超出版本限制如何解决?如图: A1:用注册机对KEIL5软件进行重新破解,破解步骤链接: Q2:延时函数如何快速自动生成? A2:在STC-ISP中根据红色方框进行设计 Q3:单片机计时器TH0 和TL0初值的计算方法 A3:首先计算计数值: //8位逢256进位,整除的结果为高位,取余的结果为低位 Q4:单片机计时器TMOD设置 A4:通常情况下,定时器0的TMOD=0x01,工作模式1——16位计时计数器 (65536) 下面两张图是工作模式1和2的对比流程图:问题解答:
例如:计数值=10000us(10ms转换成微秒)* 11.0592(晶振大小)/12 计算结果=9216
TH0=(65536-9216)/256 =DC
TL0=(65536-9216)%256 =00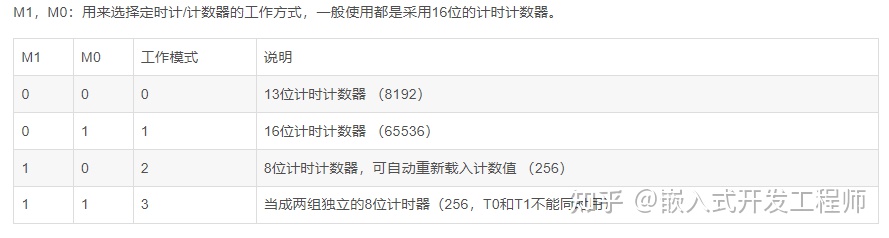

本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。