文章摘要
以网联自动驾驶汽车(Connected Autonomous Vehicle,CAV)为研究对象,研究了CAV车队通过城市信号交叉口的速度轨迹优化控制策略。基于最优控制理论,采用CAV的自动驾驶模型描述车间相互作用,以所有CAV车辆在行驶过程中的总油耗为优化目标,根据信号灯的配时信息建立模型约束,通过优化CAV头车的速度轨迹,保证整个CAV车队在绿灯相位下快速通过交叉口并实现油耗最小。
为了对该优化控制进行高效求解,采用离散Pontryagin极小值原理建立最优解的必要条件,利用基于神经网络训练的弹性反向传播(Resilient backpropagation,RPROP)算法设计了数值求解算法。多个典型场景的仿真结果显示:整个CAV车队均能在不停车的情形下通过信号交叉口,避免因在红灯时间窗到达停车线造成的停车、启动等过程,总油耗量最高可减少69.74%。该控制方法利用网联自动驾驶技术的优势,显著改善了城市交通通行效率和燃油经济性。
所提方法
1.CAV速度轨迹优化模型
本文采用C.Letter提出的自动跟车算法描述CAV的驾驶行为,见下式。
式中: i =1,2,…, n ;a**i ( t )为第i辆车t时刻的瞬时加速度,m/s ^2^ ;s**i ( t )为第i辆车t时刻的瞬时位移,m;v**i ( t )为第i辆车的瞬时速度,m/s;h**t为期望车头时距,s;d0为最小安全车间距,m;k1和k2为模型参数。
以CAV车队每1辆车的位移和速度作为状态变量(维数为2 n ), x =[s1v1s2v2 … snv**n ] ^T^ ,以CAV头车的加速度 u ,m/s ^2^ ,为优化控制变量,可以建立CAV车队行驶的状态方程模型 x ˙( t )= *f * [ *x* ( *t* ), *u* , *t* ],见下式。

为了计算车辆在行驶过程的油耗量,需要建立油耗模型。车辆油耗模型有很多,考虑到该模型计算量会随着CAV车队车辆数增加而增加,为了提高计算效率,笔者采用欧洲环保局(European Environment Agency,EEA)开发的基于平均速率的COPERT油耗模型,见下式。

式中:ρ1 ,ρ2 ,ρ3为COPERT模型参数。
以所有CAV车辆的总油耗为优化控制的目标函数,见下式。

式中:t0和tf分别为控制初始时刻和终端时刻,s。
利用V2I通信,CAV获取交叉口的信号配时,假设距离当前时刻最近的绿灯相位时段[tg1 ,tg2 ],建立系统约束见下式。


上式通过对CAV车队头车在tg1时刻的位移以及尾车在tg2时刻的位移进行约束,保证了CAV车队的所有车辆均能在绿灯相位时段[tg1 ,tg2 ]通过交叉口。
考虑汽车的能力限制,行驶的速度需要满足约束,见下式。

式中:vmin为最低车速,m/s,vmax为最高车速,m/s。
综上,式(2)和式(4)~(7)为基于最优控制的CAV速度轨迹优化模型,通过优化CAV头车的速度轨迹,便可以保证CAV车队所有车辆均能在绿灯相位下高效地通过交叉口,同时最小化所有车辆的燃油消耗总量,提高燃油经济性。
2 基于RPROP的求解方法
2.1最优解的必要性条件
为了在计算机上实现对上述最优控制问题的高效求解,对其进行离散化处理,接着通过惩罚函数法将不等式约束进行处理,通过引入拉格朗日乘子,将其转化为无约束的最优控制问题,最后利用离散系统Pontryagin极小值原理建立最优解的必要条件。
以Δt为离散步长,以[0,tg2 ]为优化控制周期,共K个离散时刻,kg1对应绿灯时间窗的开始时刻tg1 ,绿灯时间窗的结束时刻tg2为控制结束时刻 K 。采用差分法对CAV车队动态模型进行离散化,得到如下形式。


根据模型约束,构造如下惩罚函数:
引入惩罚因子构造离散最优控制的增广目标函数:


式中:为惩罚因子。
构造Hamiltonian函数,见下式。

利用Pontryagin极小值原理建立最优解的必要条件。


2.2基于RPROP的求解算法
采用基于神经网络训练的弹性反向传播算法(RPROP)方法,构造梯度方向,设计求解算法。其基本思想为:从某个初始值开始,根据Pontryagin极小值原理(见2.1节)得到梯度方向,并根据历史梯度信息动态更新搜索步长以加快求解速度,设计基于RPROP的求解算法。
离散化系统极小值的条件:
在搜索解的过程中,RPROP方法根据梯度符号决定搜索的方向,并根据搜索过程的结果动态调整搜索步长,可以保证求解的快速性。虽然RPROP方法无法保证收敛到全局最小值,但在实际应用中往往能获得比较满意的最优解。
梯度值 h ( k )可根据Hamiltonian函数见下式。
建立控制向量的迭代公式,见式(17)。

仿真实验
通过仿真实验,验证本文所设计的CAV速度轨迹优化策略。为了便于对比分析,分别将优化控制前、后的结果进行对比分析。在仿真过程中,假设交叉口停车线上游550 m处,有5辆车形成的CAV车队,初始速度为10 m/s,初始加速度0 m/s ^2^ ,V2I的最大通信距离为350 m(A点),也就是说:一旦CAV进入ICU可通信范围,即可与路侧基础设施进行通信。
初始时刻信号灯为绿灯相位,绿灯时间窗为[0,30 s],仿真结果见图1。
由图1可见,在该场景中,车队初始时刻以10 m/s的速度行驶。在没有采取优化控制的情况下,CAV车辆继续匀速行驶,错过了第1个绿灯相位(时间窗为[0 s,30 s]),在红灯相位时间到达停车线,唯有停车等待下1个绿灯相位。采取本文设计的速度轨迹控制策略后,CAV一旦进入ICU的通信距离,就可接收到ICU广播的信号配时信息,开始进行轨迹优化。CAV头车在优化过程中,不仅考虑本车,而且考虑整个车队的通行效率,于是CAV头车开始加速,使车队所有CAV车辆无需停车等待,均能在第1个绿灯相位通过交叉口。
由于优化过程中考虑了燃油经济性的优化,故加速过程中并未出现较大幅度的变速(整个运动过程中,0 m/s ^2^ ≤ a ≤2.93 m/s ^2^ ),经过COPERT模型的计算,总油耗量减少了69.74%。可见,通过本文设计的轨迹优化控制策略,CAV头车及时地根据信号配时信息进行轨迹优化,保证车队所有车的行驶效率,避免了因在红灯时间窗到达停车线造成的减速、停车、加速行为,显著减少了燃油消耗量。
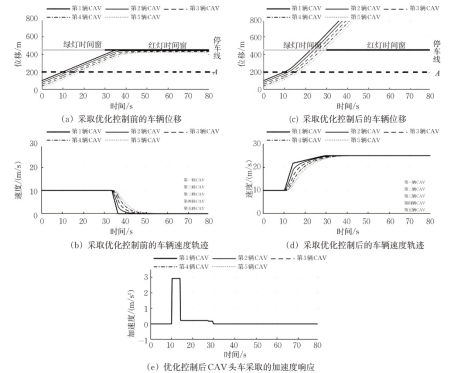
图1 场景1仿真结果对比图
阅读心得
本文构建了基于最优控制的CAV车辆通过信号交叉口的速度轨迹优化控制模型,并利用离散系统Pongryagin极小值原理建立最优解的必要条件,采用RPROP算法方法设计了求解方法,在保证求解质量的同时提高了求解速度。
仿真结果显示,CAV根据基于V2I通信获得实时信号配时信息,提前对自身速度轨迹进行调整,保证所有CAV车辆在绿灯相位时间窗无停车通过信号交叉口,避免因在红灯时间窗到达停车线造成的减速、停车、启动加速等过程,显著减少了所有车辆的总油耗,提高了通行效率。由于本文只考虑了CAV在单车道行驶的情况,在未来的研究中,将进一步研究CAV在多车道的行驶情况,考虑CAV的换道行为,对CAV的速度轨迹进行优化。