汽车毫米波雷达频段下的24 GHz限值
上一篇我们了解了:在我国的汽车毫米波雷达所使用的频段。有些读者已经查阅了文件的规定,对“76-79 GHz雷达的峰值功率(+天线增益)最大可以到55dBm”,留言说了句“这么夸张么”。确实,这功率相当于一个小基站了。我们具体再看一下,在两种可继续使用的汽车毫米波雷达频段下的功率限值。今天先来看24 GHz频段。
01
24-24.25 GHz
上一篇提到,在我国《微功率短距离无线电发射设备目录和技术要求》中,保留了24-24.25 GHz的频段作为H类设备,可以用于汽车雷达,它的发射功率限值是:20mW (e.i.r.p),近似为13dBm。除了发射功率,还有相应的一些杂散限值。
接下来我们再来看一看在相近频段欧标的功率限值。ETSI EN 302 858 中给出了在24.05GHz至24.25GHz频率范围内工作的窄带汽车雷达设备以及24.05GHz至24.5GHz的WLAM(wideband low activity mode radar equipment)宽带低激活模式雷达的技术要求。
首先,对于24.05-24.25 GHz的窄带汽车雷达,规定了如下功率限值,根据不同频段、不同功率以及不同频谱接入的条件,信号类型又分为A,B,C,D,E五种。Peak e.i.r.p功率限值有20dBm(100mW)和-10dBm(0.1mW)两种。如下表所示:
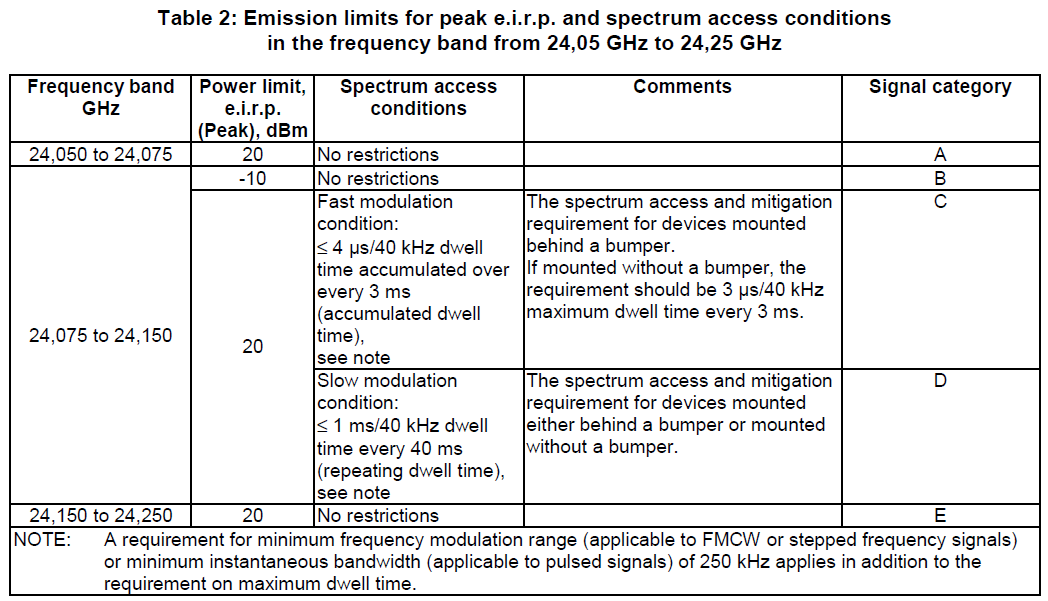
其中C类和D类的24.075-24.15 GHz频段,虽然peak EIRP要求也同样为20dBm,但并不是无条件的,即有频谱接入条件,频谱接入条件其实就是对驻留时间的要求,具体分下面两种:
快速调制:
要求≤4μs/40kHz的驻留时间,每3ms累积一次(累积驻留时间)。什么意思呢?让我们来设想FMCW的调频连续波信号(如下图的时间 vs. 频率图),对于快速调制条件,"累积 "意味着在相同的40kHz调制频率范围内(例如下图纵轴BW_o的范围),在3ms间隔内(例如下图的横轴t_o的范围)的单次驻留时间(例如下图横轴t_d1和t_d2的范围)之和必须小于4μs。这还是针对安装在保险杠后面的设备的频谱接入要求。如果没有安装保险杠,则要求应该是每3ms有3μs/40kHz的最大驻留时间。
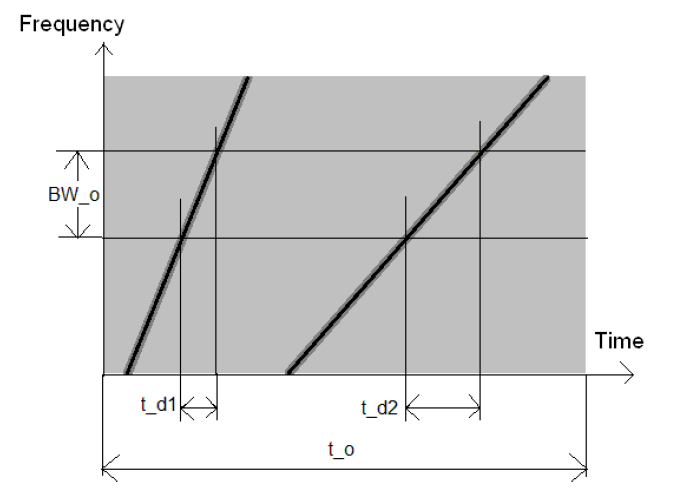
慢速调制:
对安装在汽车保险杠后面或不安装保险杠的设备的频谱接入要求是:每40ms≤1ms/40kHz的驻留时间(重复驻留时间)。我们还看上面这张图,允许在最多1ms内进入40kHz的范围,最小重复时间为40ms。在1ms的时间内,可以离开和重新进入40kHz的范围;在1ms时间之外,只有在低于-10 dBm e.i.r.p.或满足快速调制条件的情况下,才允许在任何其他时间进入同一个40 kHz范围。
所以说,C类和D类的汽车雷达设备的功率限值是需要有时间维度作为条件的,20dBm并不是一个允许常发的功率值。
02
24.05-24.5GHz
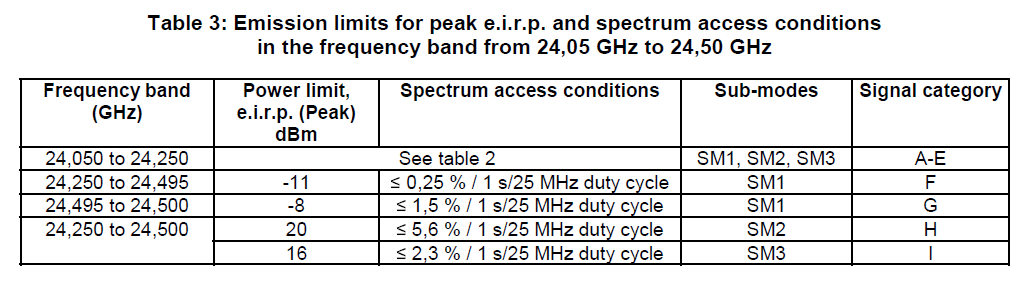
欧标中又定义了24.05-24.5 GHz的WLAM,宽带低激活模式雷达,是什么情况呢?我们先来看一下WLAM所包含的SM(sub mode:子模式)分类:
子模式1(SM1):朝前的雷达,用于正面校准子模式;
子模式2(SM2):前置雷达,前部紧急APPS(主动行人保护系统:Active Pedestrian Protection System)子模式,在摄像头监测到碰撞事件时,激活用于紧急制动支持,车速超过20km/h;
子模式3(SM3):面向后方的雷达,后方停车子模式,只在车辆向后移动以更好地辨别行人时激活,速度 < 30 km/h;
WLAM的功率限值见下表所示,Peak e.i.r.p功率从-11到20 dBm不等。同样也是有频谱接入的条件限制。这里在F、G、H、I信号类型中使用的是占空比(Duty cycle)的频谱接入限值,例如在24.250-24.500 GHz频段,信号类型H,如果1s的观测期,25MHz带宽范围内的占空比应≤ 5.6 %,peak eirp应小于20dBm。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。