毫米波雷达被特斯拉“返聘”,马斯克到底图的啥?
据说世界上最难的两件事,一件是把自己的思想装进别人的脑袋,一件是把别人的钱装进自己的口袋。这两件事,毫米波雷达做到了:让坚持纯视觉方案的特斯拉花钱再度把它“请”上了车。

预计搭载4D毫米波雷达的特斯拉谍照
想必不少朋友已经知道这件事儿了,特斯拉即将推出的HW 4.0智驾方案预计包括一个4D毫米波雷达,消息一出连带着各大相关企业股票狂涨。让股市震荡,让马斯克“真香”,4D毫米波雷达到底有啥本事?
毫米波雷达
回答这个问题之前我们得先认识车载毫米波雷达。

车载毫米波雷达工作模型图
如果用一句话形容车载毫米波雷达有多牛,我只能说,它开启了智能辅助驾驶时代——1999年奔驰S级车型首次应用了基于毫米波雷达实现的自适应巡航功能,这套系统被命名为Distronic(限距控制系统)。

搭载Distronic系统的奔驰S级
即使我们看到现在车企们更愿意以激光雷达为门面去宣传自家的智能辅助驾驶能力,但事实上,毫米波雷达的特质是激光雷达无法替代的。
毫米波雷达是工作在毫米波波段探测的雷达,一般毫米波的波长为1-10mm,频率在30-300GHz,通过发射和接收电磁波的信号后利用多普勒效应来计算目标物的各个参数(如测距、测速、测角)。
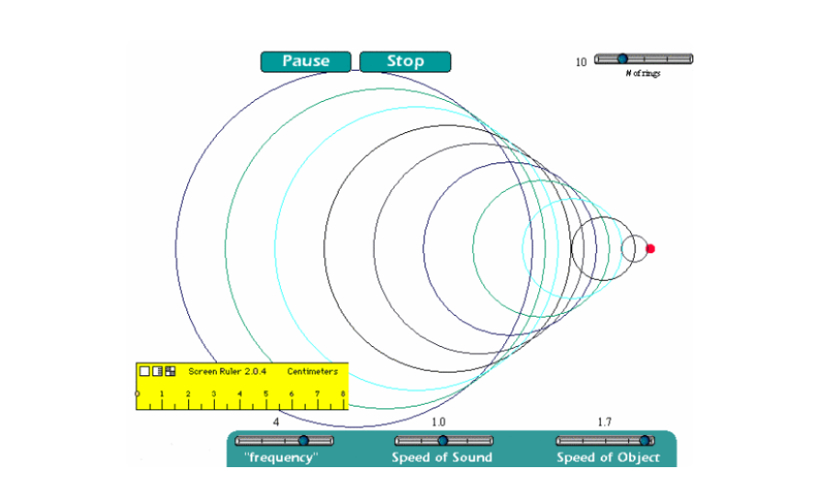
多普勒效应
不同长度的波在大气中传递时被阻碍和吸收的程度不同,而毫米波的波长介于微波和红外波之间,所以它有着两者的优势,与微波相比,毫米波的指向性好、分辨率高、抗干扰能力强,探测性能也更好。
与红外波相比,毫米波在大气中传播时的衰减小、能更好穿透烟雾灰尘、受天气影响小。这些特质决定了毫米波雷达具有全天时全天候(除暴雨)的工作能力。
由于雷达涉及军用,所以国家开放给民用的频段是有管制的,目前世界上主流的车载毫米波雷达频率为24GHz(也被视为毫米波频率)、77GHz、79GHz,也有少数国家如日本开放60GHz频率。
国内开放给车载毫米波雷达的频率就是24GHz和77GHz,所以目前国内的车载毫米波雷达分为24GHz和77GHz毫米波雷达。
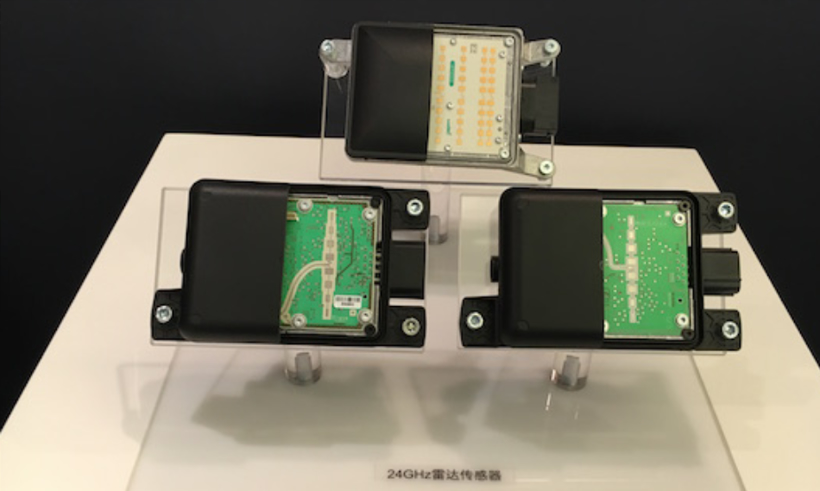
海拉24GHz毫米波雷达
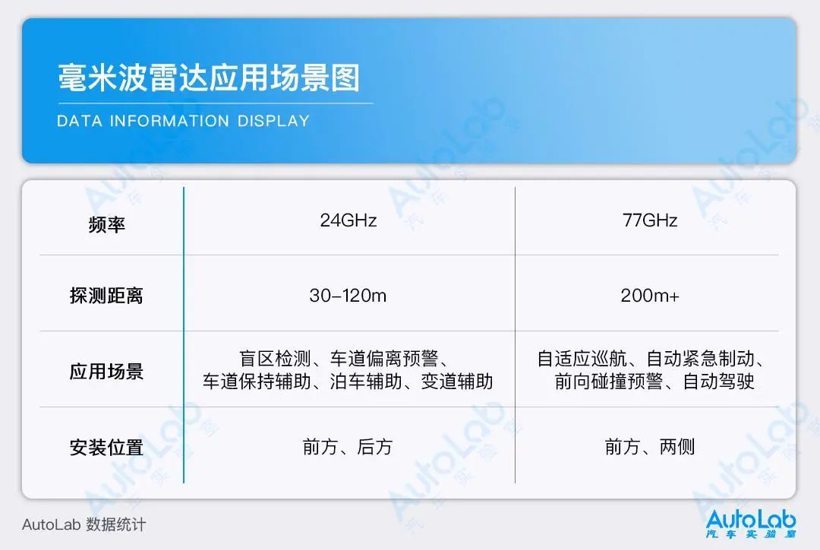
就像不同分贝的声音能传到不同的距离,不同频率的毫米波雷达能探测的距离也不同。24GHz的探测距离通常在30-120m,77GHz的探测距离通常在200m及以上。
看到这里可能有物理比较好的朋友要质疑我了:根据波的传播理论,频率越高,分辨率越高,穿透能力越强,但传输时损耗也越大,传输距离越短;相对地,频率越低,波长越长,绕射能力越强,传输距离越远。
那我为什么说77GHz毫米波雷达比24GHz毫米波雷达的探测距离更远呢?这和毫米波雷达的结构和工艺有关。
毫米波雷达的硬件占比约为50%,主要由射频前端(MMIC)、数字信号处理器、天线、控制电路等部分构成,另外50%则由软件算法构成。

打造毫米波雷达的过程中
雷达天线的尺寸和波长成正比,24GHz雷达波长较长,所以天线的体积更大,而77GHz雷达天线比较小(大小大概为24GHz雷达天线的1/3),同样的体积可以布置更多的天线单元。
一般24GH毫米波雷达的天线只能做到1发2收,77GHz毫米波雷达却能做到4发4收,整体天线阵的增益是使77GHz毫米波雷达探测距离更远的一个原因。
另外24GHz的毫米波绕射能力更强,就像《画画接龙》这个游戏一样,传到最后已经出现了严重的信息偏差,也就近距离的探测信息比较靠谱。
两者在分辨力上也有区别:77GHz毫米波雷达的分辨距离最小为3.75cm,而24GHz毫米波雷达则为60cm。

一颗国产77GHz毫米波雷达
这意味着当两个目标物体之间的距离为60cm时,只有77GHz毫米波雷达能成功分辨,24GHz毫米波雷达则会视为只有一个目标物体。
虽然看似只是频率不同,但实际上两者的性能有很大差异,因此它们的使用场景也有所不同。现在业内常见的毫米波雷达搭配方式是1个前向+4个侧向(左前、左后,右前、右后),整理如下:
目前主流毫米波雷达的功能有测角、测距、测速,也就是测量目标物体的方位,与目标物体的距离和目标物体的速度,我们称之为3D毫米波雷达。不过它有一个巨大缺陷,就是无法识别静止物体。
由于缺乏高度信息,对于3D毫米波雷达来说,不会产生速度信息的地面减速带或其他静止障碍物和上方的天桥没有什么区别。
如果测到天桥也立马牵动刹车那也太离谱了,所以3D毫米波雷达的算法直接忽略这些静止物信息,就算前面放一块陨石,3D毫米波雷达都不会触发刹车。
这可能是2020年一辆特斯拉直接撞上前方静止车的原因,毫米波雷达选择闭眼冲,而当年特斯拉的视觉方案也没有现在这么精良。

辅助驾驶模式下即将撞上货车的特斯拉
这个缺陷让毫米波雷达在需求越来越高的智驾市场陷入了僵局,直到2020年第一颗4D毫米波雷达的诞生。
4D毫米波雷达VS激光雷达
基于3D毫米波雷达的基础,4D毫米波雷达增加了高度信息,带来的直接影响就是4D毫米波雷达可以成像。
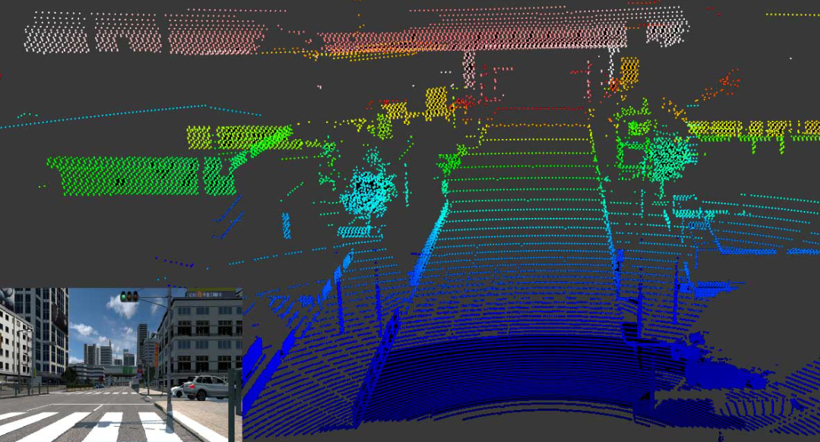
当波射到物体表面时,所反射回的波会携带方位、距离等信息,经过坐标转换则呈现为点云数据,两种毫米波雷达经软件算法换算出的图像如下:
比如一个80 cm体宽1.7m身高的人在快速奔跑,3D毫米波雷达就会识别为一道由点组成的横向80 cm虚线在某距离以某速度向某方向移动,而4D毫米波雷达会识别为由点组成的80 cm体宽1.7m高人形在某距离以某速度向某方向移动。
当前方出现了一道长2m并离地3m的限高杆,同时下方有一条等长的减速带,3D毫米波雷达就会识别为两条几乎重叠的由点组成的长2m虚线,而4D毫米波雷达则会识别出两条长2m的虚线中间的无障碍距离为3m。
4D毫米波雷达不再有无法识别静止物的缺陷,加上价格只有激光雷达10%-20%的优势以及本身毫米波雷达探测距离远、抗干扰能力强、雨雾无阻的特质,4D毫米波雷达被视为激光雷达的强劲对手。

用4D毫米波雷达替代激光雷达,可行吗?就目前来说,答案是否定的。
4D毫米波雷达和激光雷达的本质都是通过波信号来主动探测,4D毫米波雷达的波长在3.9mm,而激光雷达的波长通常为905或1550nm,由于波的传播特质,激光雷达在面对雨、雾、沙尘暴等天气几乎束手无策,而毫米波雷达则能发挥性能。
虽然它俩都能成像,但是激光雷达有个碾压4D毫米波雷达的优势,就是分辨率。市面上的4D毫米波雷达每秒大概可以生成10万个点云,而128线激光雷达可以实现每秒140万点云的生成。
用140万个点描摹出的画像自然比用10万个点描摹出的画像,精确度要高得多。不仅是画像轮廓的清晰程度不同,更直接的影响就是角分辨率的差距。
激光雷达的角分辨率做到了0.1°,而4D毫米波雷达可以做到1°,也就是说当2个目标物体间的角度角度差距为1°时,只有激光雷达可以分辨得出。
说到底,在成像方面,激光雷达有着4D毫米波雷达无法匹敌的分辨率。目前的4D毫米波雷达更加适合做视觉算法的补充,在雨雪天气时为摄像头助一把力。
这样看来,4D毫米波雷达比激光雷达更适合特斯拉。
除了成本方面,激光雷达的成像优势对于特斯拉的视觉方案是重复的,摄像头和激光雷达的共同缺点就是受限于可见度低的天气,而这个问题只有毫米波雷达能为特斯拉解决。
毫米波雷达历史
回到开头的问题,也许很多朋友会选择中国,毕竟咱们现在的智驾市场如火如荼,但实际答案是德国。
1904年,德国人斯琴·赫尔斯麦耶,基于前人电磁理论和电磁波实验的基础上,利用无线电波回升探测装置,研制出了原始的船用防撞雷达,这就是世界上第一颗雷达。
1935年英国人罗伯特·沃特森·瓦特成功研制出一台实用雷达系统,并被英国空军大规模部署,而这个系统通过提前检测到德军飞机,协助英国抵御住了纳粹德国的攻击,获得了“不列颠空战”的胜利。

罗伯特·沃特森·瓦特
德国人发明的雷达被英国人用来打败了德国?据说德国人十分不服,回去苦心研究,再后来汽车产业的繁荣以及1986年欧洲制定的“欧洲高效安全交通系统计划”催化了车载雷达的蓬勃发展。
2012年,德国半导体巨头英飞凌推出24GHz单片雷达解决方案,降低了毫米波雷达的技术门槛和制造成本,推动毫米波雷达在各领域的应用。
国内研究毫米波雷达的时间并不长,2013年24GHz毫米波雷达产品才进入中国,同时国外对国内开启了77GHz毫米波雷达的技术封锁。
2014-2016年国内的毫米波初创企业成立,其中首家研究毫米波雷达的就是上汽集团旗下的华域汽车。2016-2017年,国产24GHz毫米波雷达开始量产,77GHz毫米波雷达开始出现样品。
虽然目前全球毫米波雷达市场仍被博世、大陆、海拉等海外龙头厂商占据主要份额,但是国内的行业发展也处于欣欣向荣的状态,国产77GHz毫米波雷达早已面世,例如德赛西威、森斯泰克、楚航科技等国内领先的企业都具备量产能力。
最后我想片面的浅聊一聊,为什么国外掌握着更好的智能辅助驾驶核心传感器技术,而国内却成为了智能辅助驾驶的核心战场。
2018年的时候德国制造商大陆集团就对自动驾驶汽车接受程度进行调查。中国受访人中,高达 89% 的人表示支持自动驾驶技术,相比之下,德国和美国的受访者对自动驾驶支持的比例分别只有 53% 和 50%。
英国的德勤咨询公司也做过一次调查,截至2019年,中国对自动驾驶汽车感到“危险”的消费者比例为25%,是亚洲6个调查国家和地区中最低的。
2022年北京日报做了个关于中国人对自动驾驶的接受程度的调查,结果显示,超八成中国人接受自动驾驶,比例远高于其他国家。

聊这个并不是为了让大家忽略目前智能辅助驾驶技术的不成熟,相反,我们需要更加实际的去接受现有智能辅助驾驶技术的局限。但是这些数据表明,我们对科技有着更包容、积极的态度,即使起步晚了一点也没关系。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。