4D毫米波雷达平替激光雷达?这场误会该解了

“4D毫米波雷达替代3D传统雷达是一个绝对趋势。”
4D成像雷达,也就是我们常说的4D毫米波雷达,正在成为自动驾驶系统传感器的“明日之星”。
不仅坚守多年纯视觉路线的马斯克在HW4.0中悄悄加入4D毫米波雷达,国内的上汽 飞凡R7 ( 参数 | 询价 ) 、长安深蓝SL03,以及马上要上市的飞凡F7同样都是4D毫米波雷达的拥趸者。
相比3D毫米波雷达,4D毫米波雷达可以在获取目标距离、速度以及水平角的基础上,探测俯仰角(也就是高度)信息,从而输出类似激光雷达的点云成像效果,同时其成本远远低于激光雷达。
基于此,也有人认为,更便宜的4D毫米波雷达将成为激光雷达的“平替”。
而我们这篇文章要解答的,主要有这么几个问题:
什么是4D毫米波雷达?目前量产应用情况和市场格局如何?
当然还有最重要的,4D毫米波雷达,是否真能让激光雷达成为历史?
01
什么样的毫米波雷达,能让马斯克不得不用?
要了解4D毫米波雷达,我们需要先对毫米波雷达有个基本的了解。
所谓的毫米波雷达,就是一类使用天线发射波长1-10mm电磁波的雷达传感器(也就是所谓的毫米波),其频率范围一般在24-300Ghz。

毫米波雷达的工作原理是,通过向外界发射电磁波,从而探测目标的反射信号,根据发射和接收毫米波的时间差来推算探测目标与信号发出点的相对距离。
根据多普勒效应,毫米波雷达还能通过接收时间和频率的变化,探测出与目标之间的相对速度;通过并列接受天线的几何距离,和同一个探测目标反射波的相位差,计算出目标的方位角,进而就可以根据角度来确定目标的具体方位。
距离、移动速度、水平角度,3个维度的信息,即3D毫米波雷达。
可见光、激光、毫米波同属于电磁波。由于波长的不同,导致了物理层面有很大的差异。其中相比摄像头和激光雷达,毫米波雷达至少具备3个方面的优势:
其一,全天候的工作能力。毫米波雷达发射的电磁波不管是白天还是夜晚,都不会因为光线的问题影响探测效果,这一点是摄像头无法做到的;
其二,环境适应能力强。这一点最明显的体现是,对天气的适应能力。电磁波极强的穿透能力意味着,毫米波雷达无论是刮风雨雪,还是雾霾风尘,都能够正常工作;
其三,毫米波雷达相对其他传感器,具有在测距的同时测速的天然优势。而且对于距离超过300m的物体,也能形成稳定的探测能力。

这么一说是不是还挺厉害的?但与之能力不相匹配的是,毫米波雷达在ADAS传感器方案中的角色,始终是作为一个“冗余”出现。
之所以如此,是3D毫米波雷达在优势突出的同时,硬伤一样不少,简单来说,有2个最核心的问题:
首先,3D毫米波雷达因为天线数有限,所以在分辨率上有着天然的劣势,导致3D毫米波雷达很难勾勒出障碍物,尤其是小目标的障碍物轮廓。
其次,是对静态目标的检测能力有限。传统的毫米波雷达没有纵向天线排布,因此无法获取目标物的高度信息。也就是说,在毫米波雷达的“眼中”,悬空的交通指示牌和地面上的障碍物永远处在同一个水平线上。
这种情况造成的后果是,车辆对于障碍物的判断容易出现问题,在该刹停的地方不刹停,不该刹停的地方频繁刹车。

所以目前业界往往会将毫米波雷达某些检测信息降低置信度,这也在无形中限制了毫米波雷达的能力上限。
而这些问题,随着4D毫米波雷达的出现,有了解决的可行性。
所谓的4D毫米波雷达,就是比3D毫米波雷达多了一个“D”——俯仰角,也就是高度信息。虽然只多出一个维度,但对于毫米波雷达来说,其意义巨大。
要理解这一点,我们需要搞清楚4D毫米波雷达多出来的那个“D”,是如何实现的。目前来讲,主要有3种方案:
1、级联方案:就是简单的做加法,通过级联多个雷达芯片(MMIC芯片)来排布纵向天线,同时增加实体天线MIMO(虚拟通道数),从而达到提升分辨率和获取高度信息的目的。
这种方法的优势在于,前期研发技术门槛比较低,做样板比较容易。但比较考验量产和工程化能力,另外也会造成4D毫米波雷达体积大、功耗高等问题。
2、级联+虚拟孔径成像:这种方法是在级联的基础上,通过虚拟孔径成像技术将物理天线虚拟出数十倍的天线数,以此来达到提高分辨率的目的。严格意义上来说,这种路线其实也属于第一种,其差异主要在虚拟孔径成像算法上。
3、集成芯片方案:简单理解,就是将级联方案中多个板子的天线全部集成到一块芯片上,体积小的同时还能实现想要的效果。
福瑞泰克雷达产品线总工程师告诉《赛博汽车》,目前业内主流技术路线是级联方案。集成芯片方案在商业模式上比较封闭,目前主要是一些规模较小的公司在做。
但不管是哪种方案,其本质都是一样的,即在横向天线排布的基础上,增加纵向天线排布,从而让4D毫米波雷达拥有俯仰角的探测能力,同时提升探测的精准度。
其探测效果到底有多大不同,我们看下面这张图:
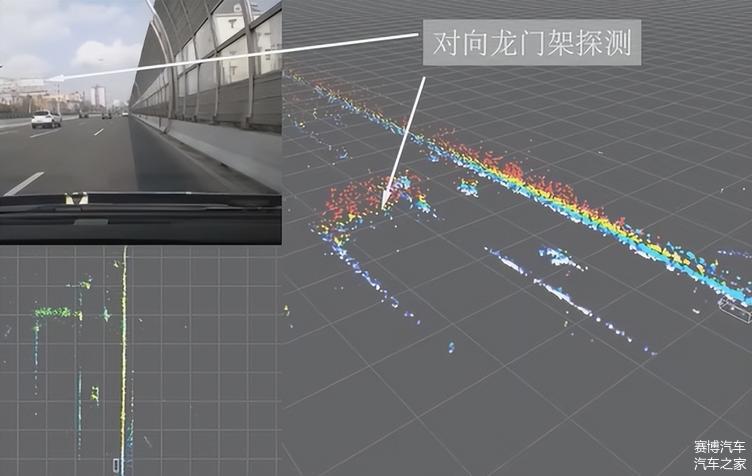
对比之下,高下立现,4D毫米波的点云图,每个点云上都带有高度信息,且点云更加密集,成像结果更偏向激光雷达。
02
4D毫米波雷达,站在市场爆发前夕
从目前的情况来看,4D毫米波雷达量产上车的并不多,尚处在市场爆发前夕。
明确将4D毫米波雷达作为智驾方案特色和车型卖点的,是上汽旗下飞凡汽车。

去年九月份,飞凡R7正式上市,该车型搭载的飞凡自研智能驾驶系统Rising Pilot,搭载33颗传感器,其中就包括两颗全球首发量产,探测距离达到350米的采埃孚4D毫米波雷达。
飞凡第二款车型,马上要上市的F7,4D毫米波雷达同样有所搭载。
作为较早“吃螃蟹”的一家车企,飞凡应用4D毫米波雷达的逻辑其实非常简单。飞凡汽车首席科学家金杰盂在最近的一次飞凡OTA媒体沟通会上表示,4D毫米波雷达上车,其中有一个很重要的原因是4D毫米波雷达带来的收益和成本。简单来说,就是一个成本相对较低,且能够实现更好智驾体验的传感器。
长安深蓝SL03同样也是4D毫米波雷达的拥趸者。去年7月,深蓝SL03曝出的传感器方案中,一颗4D毫米波雷达以前向雷达的角色出现,供应商是国内的雷达企业森斯泰克。
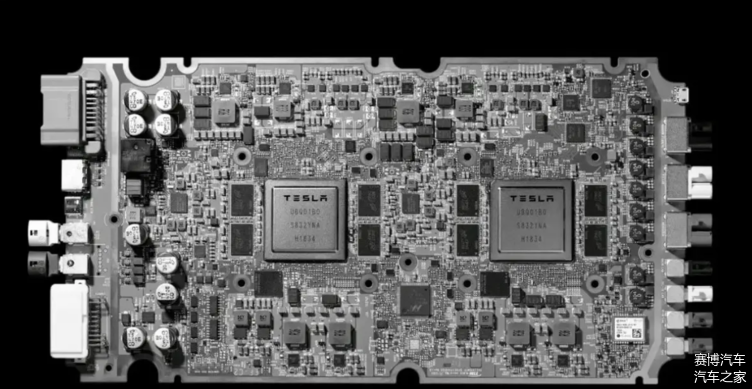
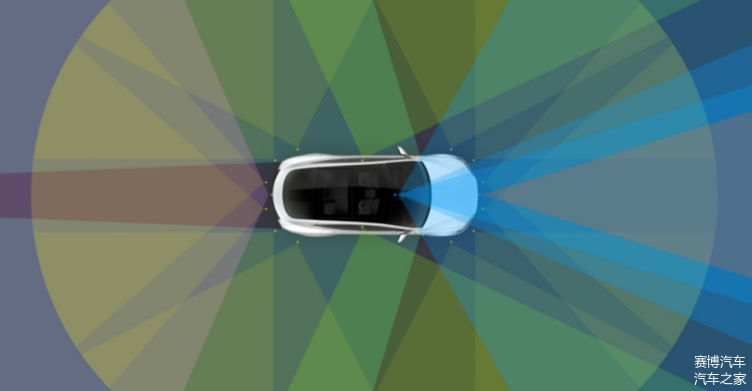
再往后看,热度更高的恐怕要数前不久曝出的特斯拉HW4.0,从硬件拆解的情况来看,除了增加3个摄像头接口之外,还多了一个4D毫米波雷达接口。
从应用的角度来看,目前车企主要将4D毫米波雷达当作前向或者后向的长距雷达,但往后看,福瑞泰克认为,车辆对于多个4D毫米波雷达(比如说角雷达)的需求是存在的,并且这种搭载方案很快就能看到。
以上是车企应用端,而在产业链的上游,4D毫米波雷达制造商的竞争则更加热闹。归结起来可以总结为一句话:2021年之前,国外先发国内跟随,2021年之后,新老玩家混战,差距趋近缩小。
需要承认的是,最先布局4D毫米波雷达的,还是以国外的传统Tier1为主。

2019年,以色列雷达供应商Arbe率先发布车载4D毫米波雷达Phoenix,算是打出了这一赛道的第一颗子弹。据悉,特斯拉HW4.0采用的4D毫米波雷达,供应商正是Phoenix。
次年,大陆集团联合赛灵思发布全球首个可量产的4D成像雷达ARS540,4D毫米波雷达的竞争加速,在那之后,博世、采埃孚、安波福等Tier1巨头纷纷下场推出自己的产品。
如果说2021年之前国内玩家都还在观望或者说论证阶段,那在2021年之后,国内玩家的主旋律就变成了奋起直追,剑指量产落地。
以福瑞泰克为例,其4D毫米波雷达投入实质性研发布局较早。去年年底,福瑞泰克4D毫米波雷达FVR40基本实现了量产的状态,预计今年第一季度完成上车搭载。
据悉,FVR40采取双芯片级联的技术方案,角分辨率和水平分辨率均小于1°,探测距离超过300米。
除此之外,华为、华域、楚航科技、禾赛等企业也都密集布局4D毫米波雷达,从进展来看,大部分都站在量产前夕。
不过在技术差距上,行业雷达专家坦言,国内玩家的技术能力,距离头部的国际大厂,还有一定差距。
市场规模方面,据高工智能汽车研究院预计,2023年中国乘用车市场前装4D毫米波雷达将突破百万颗,到2025年4D成像雷达占全部前向毫米波雷达的比重有望超过40%。
国信证券预计,到2025年全球毫米波雷达市场规模将达到384亿元,复合增长率为25.5%。
福瑞泰克雷达产品线总工程师表示,这样的预期是合理的,同时他也表示,之后行业对于4D毫米波雷达的市场预期,“每半年就会更新一次”。
03
代替激光雷达,真的假的?
最后,我们回到题目,4D毫米波雷达,是否真的可以替代现在风头正热的激光雷达?
业内之所以有这样的一种声音出现,很大程度上是因为4D毫米波雷达在成本上仅有激光雷达的3成左右,但却基本可以实现低线束激光雷达同等的探测效果。那随着技术的不断发展,4D毫米波雷达或许可以在探测能力上追上激光雷达。
但真相是否果真如此?
就目前来看,这种说法并没有得到业内人士的认可。
福瑞泰克雷达产品线总工程师认为,每一种传感器都有自己独特的一个角色,未来实现更高级别的自动驾驶,这三种传感器可能都要既能够独立的去完成绝大多数的功能,同时还要在更高的层面、更安全的层面上形成互补。
金杰盂也表达了类似的观点,他表示,不同的传感器没有绝对的替代关系,比如在某个场景下,可能激光雷达的作用更大,但在另一个场景下,可能4D毫米波雷达会做得更好。
同时,从4D毫米波雷达的落地进展上来讲,替代激光雷达或许也只是一个臆想的结果。
4D毫米波雷达的探测能力只能与低线束激光雷达相比,但目前主流的车载激光雷达大多是96、128等高线束雷达。两者的探测能力存在非常大的差别。
从成本的角度讲,4D毫米波雷达的低成本优势并不绝对,毕竟激光雷达的成本也在一步一步压缩的过程中。
除此之外,在4D毫米波雷达量产上车的过程中,仍然有一些问题需要去解决,比如政策层面缺乏国家标准,测试设备还不成熟,以及车企对4D毫米波雷达如何更好落地应用也需要学习时间……
不过,金杰盂告诉《赛博汽车》,4D毫米波雷达代替传统的3D毫米波雷达是一个绝对的趋势,今天的技术发展肯定是往性价比更好的方向去走。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。