伺服电机的好搭档——精锐广用APEX行星减速机
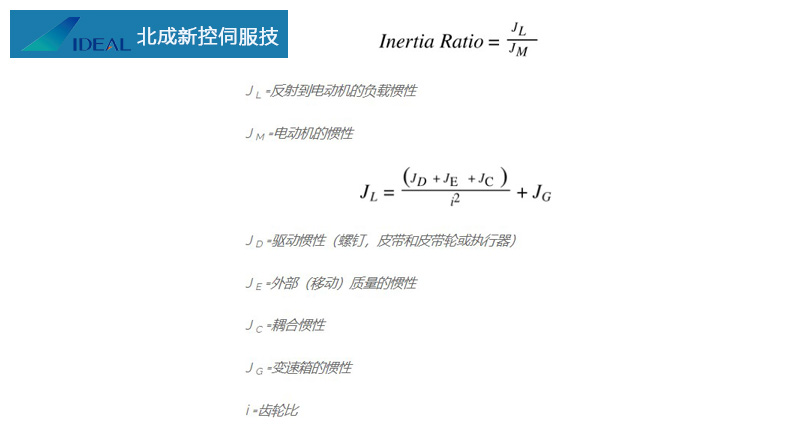
在伺服应用中,使用反馈装置来控制线性或旋转系统的扭矩,位置或速度,伺服应用中负载惯量与电机惯量之比是系统性能的关键因素。低惯性比,允许电机更精确地控制负载并避免过冲和振荡,提高系统响应性。如果不能改变负载的实际惯性,则在系统中增加一个减速机可以减少反射回电机的负载惯量。
 APEX行星减速机
APEX行星减速机
变速箱通过齿轮比的平方减小反射负载惯性,因此增加变速箱可以显着提高系统的惯性比。变速箱还将来自电动机的扭矩乘以与变速比成比例的量,同时将所需的电动机速度降低相同的量。在某些应用中,这意味着可以使用更小的电动机,并且电动机可以以更高,更有效的速度运行。
但是,任何变速箱都可以减少负载惯量,倍增扭矩和降低转速,那么为什么许多伺服应用都使用行星减速机呢?因为行星减速机比其他齿轮类型具有更高的刚度,更小的间隙,更高的效率和更低的噪音。
行星减速机使用三种齿轮类型来传递扭矩:行星齿轮,太阳齿轮和齿圈。连接的电动机驱动太阳齿轮,太阳齿轮位于齿轮组件的中心。多个行星齿轮与太阳齿轮和齿圈啮合,齿轮固定并固定在齿轮箱壳体内。当太阳齿轮旋转时,它驱动行星齿轮在其自身轴上旋转并围绕太阳齿轮旋转。行星齿轮的位置由托架设定,托架也包括输出轴。

在这种布置中,负载在多个齿轮齿之间共享,这为行星齿轮设计提供了高刚度并有助于实现低间隙,在某些设计中低至1至2弧分。高刚度对于需要频繁启停循环或旋转方向变化的应用也很重要。
行星式设计紧凑,在小型整体包装中提供高减速比。这种紧凑的设计还意味着它们具有低惯性,这在伺服应用中尤其有用,因为减速机惯性直接增加了电机必须平衡的负载惯量。虽然行星减速机与其他齿轮箱设计一样,可以用润滑脂或油润滑,但大多数都由制造商用润滑脂润滑,并且在减速机的使用寿命期间不需要重新润滑或维护。
单级行星减速机(如上所述)通常可以提供低至3:1或高至10:1的减速比。通过在串联布置中结合两个或三个行星级,多级减速机提供更高的比率。为此,外齿圈的长度增加,并且第一行星级的托架驱动下一级的太阳齿轮。因为它们是以串联方式连接的,所以各个级的减少量相乘以得到最终的输出减少量。例如,包含5:1级和3:1级的多级变速箱将具有15:1的输出比。与标准单级设计相比,多级设计提供了更好的扭矩 -尺寸比,但却牺牲了效率。
行星减速机可以使用直齿轮或斜齿轮。正齿轮提供更高的扭矩额定值,但螺旋齿轮具有更高的接触比(在任何给定时间啮合的齿数)。这种更高的接触比允许螺旋设计以更低的噪音,更高的刚度和更小的间隙运行,使得螺旋行星减速机成为伺服应用的首选。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。