行星减速机是如何搭配伺服电机的?
行星减速机是一种用途广泛的工业产品,该减速机体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性。最大输入功率可达104kW。适用于起重运输、工程机械、冶金、矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN子母齿轮传动减速器、弹性均载少齿差减速器。
行星减速机是一种具有广泛通用性的新性减速机,内部齿轮采用20CvMnT渗碳淬火和磨齿。整机具有结构尺寸小,输出扭矩大,速比在、效率高、性能安全可靠等特点。
相关概念
级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.
回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一,也有人称之为背隙。
行星减速机结构
行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.
行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.下面是几款行星减速机的结构图!


行星减速机工作原理
1)齿圈固定,太阳轮主动,行星架被动。
从图例1中可以看出,此种组合为降速传动,通常传动比一般为2.5~5,转向相同。

图例1
2)齿圈固定,行星架主动,太阳轮被动。
从图例2中可以看出,此种组合为升速传动,传动比一般为0.2~0.4,转向相同。

图例2
3)太阳轮固定,齿圈主动,行星架被动。
从图例3中可以看出,此种组合为降速传动,传动比一般为1.25~1.67,转向相同。

图例3
4)太阳轮固定,行星架主动,齿圈被动。
从演示中可以看出,此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
图例4
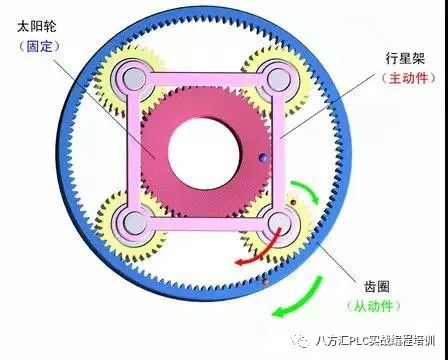
5)行星架固定,太阳轮主动,齿圈被动。
从演示中可以看出此种组合为降速传动,传动比一般为1.5~4,转向相反。

图例5
6)行星架固定,齿圈主动,太阳轮被动。
从演示中可以看出此种组合为升速传动,传动比一般为0.25~0.67, 转向相反。

图例6
7)把三元件中任意两元件结合为一体的情况:
当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。该组合行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:
从分析中可知,其余两元件无确定的转速输出。
第六种组合方式, 由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。
其余的七种组合方式比较常用。
现代工业设备应用中在高精度应用场合随着伺服电机技术的发展,从高扭矩密度乃至于高功率密度,使转速的提升高过3000rpm,由于转速的提升,使得伺服电机的功率密度大幅提升。这意谓着伺服电机是否需要搭配减速机,其决定因素主要是从应用的需求上及成本的考虑来审视。例如,以下应用场合必须搭配伺服行星减速机。
1、重负荷高精度
必须对负载做移动并要求精密定位时便有此需要。一般像是航空、卫星、医疗、军事科技、晶圆设备、机器人等自动化设备。他们的共同特征在于将负载移动所需的扭矩往往远超过伺服电机本身的扭矩容量。而透过减速机来做伺服电机输出扭矩的提升,便可有效解决这个问题。
2、提升扭矩
输出扭矩提升的方式,可能采用直接增大伺服电机的输出扭矩方式,但这种方式不但必须使用昂贵大功率的伺服电机,电机还要有更强壮的结构,扭矩的增大正比于控制电流的增大,此时采用比较大的驱动器,功率电子组件和相关机电设备规格的增大,又会使控制系统的成本大幅增加。
3、提高使用性能
据了解,负载惯量的不当匹配,是伺服控制不稳定的最大原因之一。对于大的负载惯量,可以利用减速比的平方反比来调配最佳的等效负载惯量,以获得最佳的控制响应。所以从这个角度来看,行星减速机为伺服应用的控制响应的最佳匹配。
4、降低设备成本
从成本观点,假设0.4KW的AC伺服电机搭配驱动器,需耗费一单位设备成本,以5KW的AC伺服电机搭配伺服驱动器必须耗费15单位成本,但是若采用0.4KW伺服电机与驱动器,搭配一组减速机就能够达到前述耗费15个单位成本才能完成的事,在操作成本上节省50%以上。
因此,使用者可依其加工需求不同,决定选用不同安装形式的行星减速机产品。一般而言,在机台运转上有低速、高扭矩、高功率密度场合需求,绝大部分采用行星减速机。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。