模组化INS引领车载高精定位发展趋势
在自动驾驶发展过程中,车道级高精定位是L2+到L5级自动驾驶的关键支撑,而高精卫惯组合定位系统(INS)又是实现高精度定位的核心,它能确保车辆在各种复杂环境下实时清晰自己的具体位置。常见的高精度INS组合定位系统由GNSS卫星导航和IMU惯性测量单元及融合算法组成。
2018年以来,L2及L2+级别的智能驾驶车辆占比正迅速攀升,尤其在中国,封闭半封闭场景运行的商用车无人驾驶已部分实现商业化落地,这些车辆都需要用到高精度INS组合定位系统,因而也带动整个产业不断发展。据中信证券报告显示,到2025年,IMU在L3及以上自动驾驶车辆上装载量将超过20%,而高精INS组合定位市场容量将超过130亿。
我们知道,INS组合定位系统存在的时间并不短,也有很多不同的发展趋势,那么未来它将车载高精定位发展带向何处?
在盖世“2022第四届自动驾驶地图与定位大会”上,新纳传感高级副总裁卢炜分享了新纳的见解与看法。

新纳传感高级副总裁卢炜
性能与安全性不断提高
“首先,显而易见的是性能和安全水平在不断提高。”卢炜谈到性能时表示,”INS组合定位重要的两大模块,GNSS和IMU, GNSS芯片已从原先的单频、单模发展到现在的多频多模,能够更好的实现定位,同时也引入了功能安全的概念。
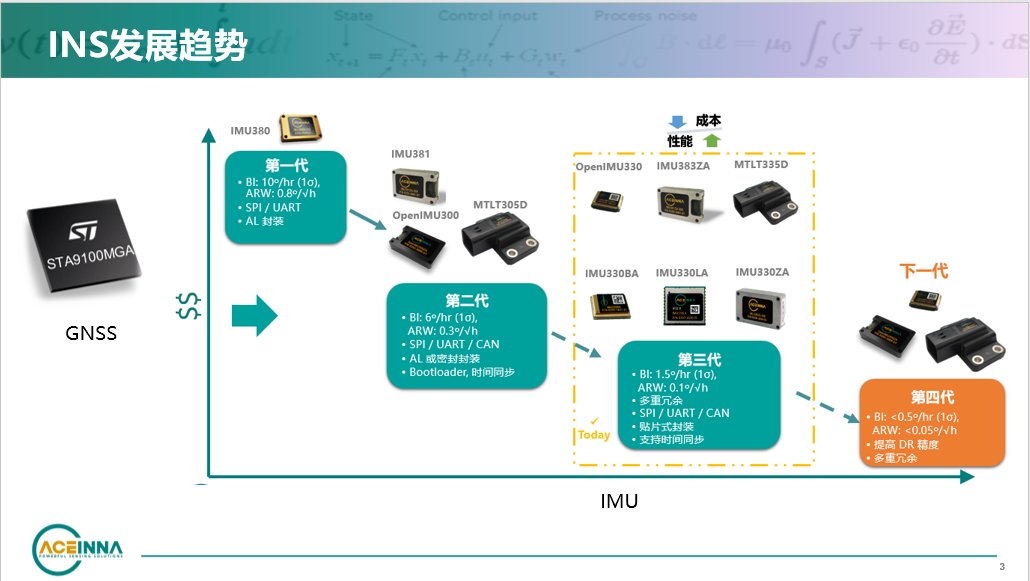
IMU,作为提高INS性能的重要环节,它也决定了INS性能的上限(在车辆实际行驶过程中,会遇到许多GNSS卫星信号断断续续的情况,比如隧道、停车场、高架桥下、林荫道等,这时系统更依赖IMU惯性传感器自身推算),目前其趋势则是在不断提高性能的同时控制成本。
早期,IMU有机械式、光纤陀螺式,一辆无人车上使用一套惯导系统甚至需要几十万光纤陀螺,显然不适合大规模铺开。现在,基于MEMS技术的IMU不断发展,就新纳的产品线来说,已经从第一代IMU 10°/h的零偏不稳定性,提高到现在第三代1.5°/h,差不多提升了一个数量级。同时,新纳自研的下一代IMU产品,其性能水平已经接近光纤陀螺IMU,并且可以将成本控制在非常好的水平内。”
图片来源:新纳传感
性能之外,INS系统在安全方面也在不断提高。卢炜坦言,目前新纳的INS组合定位系统都是基于ISO 26262、GBT34590等法规进行设计,新纳IMU产品也是业内较早实现功能安全设计的。GNSS也在快速地赶上,产品使用的GNSS芯片便是ST推出的第一款基于功能安全设计的9100。
模组化INS引领车载高精定位发展趋势
“除了性能和安全,我主要分享的还是模组化INS的趋势,这也是新纳接下来非常重要的发展方向。”
那什么是模组化?
卢炜解释道,下图是新纳INS401 P-BOX定位盒,是市面上最常见的INS组合定位系统方案,将IMU、GNSS、还有算法融合在一个防尘防水的盒子里,接入车载以太网或者车内通信接口来传输数据。
想象一下,假如把这种需要单独安装的盒子变成一块贴片式芯片模组,直接集成在智驾域控制器内,这将给车辆节省一个零部件,减少相应的接口和线束,简化整车布置。同时这种高集成度的做法可以降低INS和域控制器之间的通讯时延,从而提升高精定位的精度。最后相比于传统的P-BOX, INS模组的标定效率更高,硬件简化,自身的成本上也更有优势。

图片来源:新纳传感
模组化INS大规模应用,需攻克两大难点
模组化优点非常明显,但是在行业内却没有实现大规模应用,这主要局限于两个挑战。
“一个是高温对于IMU模块的影响。现在自动驾驶用到的算力越来越多,传感器数量、等级不断提升,对大算力芯片的功耗极大。诸如英伟达的芯片,典型功耗在30-60瓦,而目前很多新车里会装多个集成在一个域控制器中,产生的热量可想而知。对于INS系统而言,其IMU模块属于半导体器件,高温对其精度有极大影响,要将贴片式的模组装在域控制器这样高温挑战越来越大的器件里面,就需要企业做好温度补偿和校对工作。”
“另外一个比较大的挑战是贴片回流焊带来的应力变化。将贴片式模组贴到域控制器板上会涉及焊接,焊接时产生的高温可能会影响IMU元件,焊点冷却固化时也会给电路板造成额外的应力。高精度IMU对外部应力是非常敏感的,电路板的应力可能会影响其测量精度。除此之外还有一些问题,比如震动、电磁干扰、提高集成度等等。”
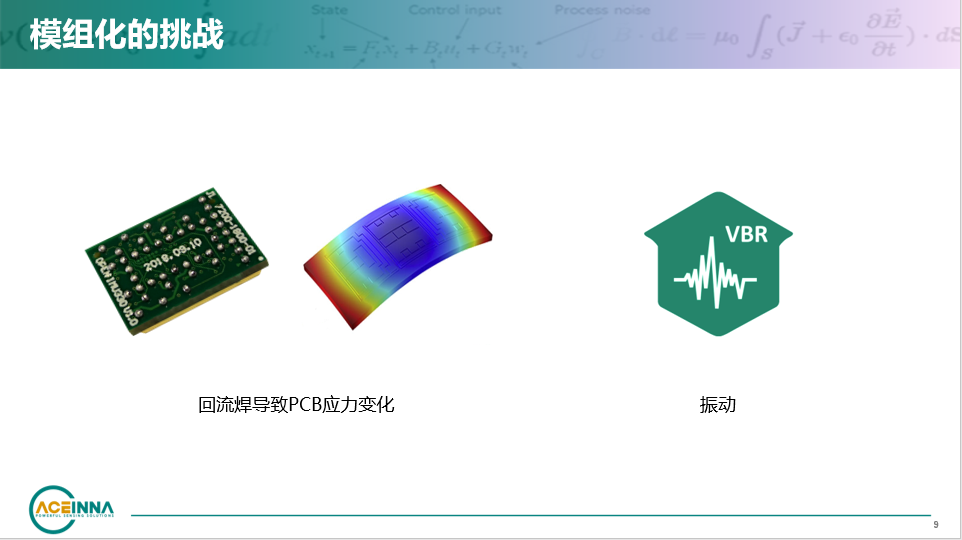
图片来源:新纳传感
新纳贴片式INS组合定位模组RTK330LA实现量产应用
虽然面临诸多挑战,但基于二十多年的技术积累,新纳仍然投入了非常多的资源,成功研发出了模块化INS系统并已投入了量产,这就是新纳贴片式INS组合定位模组RTK330LA。
据卢炜介绍,RTK330LA主要采用了ST 9100车规级功能安全芯片,新纳自研RTK算法。IMU模块使用的是自研 IMU算法和全温校准补偿,采用三重IMU冗余阵列达成功能安全要求。
而RTK330LA的实测性能也有不错的表现。新纳基于一条固定测试线路对其进行性能测试,里面涵盖了丰富地理场景如开阔道路、过桥、高架桥下等不同信号强度的路段,基本上同现在市面主流的P-BOX性能上可以达到同样的水平。在完全没有GNSS信号的场景里,业内优秀的INS系统定位精度在2.5‰左右,也就是行驶一公里偏离不超过2.5米,新纳RTK330LA可以做到2‰,完全符合现在主流L2+汽车的辅助驾驶要求。
“目前RTK330LA已经实现落地应用,集成在头部自动驾驶卡车的域控制器上,已稳定运行超1000万公里,性能经受住了实战检验。”
最后,卢炜分享了新纳在定位完好性方面的领先工作。据悉,新纳传感致力于提供高精定位软硬件一栈式解决方案,具备完整的从模组到系统、从硬件到算法的自研能力,在乘用车、商用车和精准农业自动驾驶中已取得了广泛的量产应用和验证,至今已获得国内外领先乘用车企多个车型定点并实现量产。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。