






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服自动驾驶是汽车行业的未来趋势,也是各大车企的竞争焦点。在自动驾驶技术的发展过程中,激光雷达一直被认为是必不可少的传感器,因为它可以提供高精度的三维空间信息,帮助汽车识别周围的障碍物和道路状况。然而,特斯拉却坚持使用纯视觉方案,即只依靠8个摄像头和自研的芯片和软件,来实现自动驾驶功能。这一方案引起了业界的广泛关注和争议,特斯拉到底有没有放弃激光雷达?它的纯视觉方案有什么优势和挑战?它又是如何利用视觉神经网络和算法,实现纯视觉自动驾驶的呢?

我们要明确一点,特斯拉并没有完全放弃激光雷达。事实上,特斯拉在其部分车型上仍然使用了毫米波雷达作为辅助传感器。毫米波雷达与激光雷达不同,它是一种基于无线电波的传感器,可以在恶劣天气下提供一定程度的距离测量。特斯拉使用毫米波雷达主要是为了增加系统的冗余性和鲁棒性,以应对一些极端情况,比如摄像头被遮挡或者强光干扰等。但是,特斯拉并不依赖毫米波雷达来进行核心的自动驾驶功能,而是将其作为一个辅助工具。

那么,特斯拉为什么不使用激光雷达呢?激光雷达有什么缺点呢?根据特斯拉CEO埃隆·马斯克(Elon Musk)的说法,激光雷达有以下几个主要问题:
成本高昂:激光雷达是一种非常昂贵的传感器,目前市场上最便宜的激光雷达也要几千美元⁶,而且还需要多个激光雷达来覆盖全方位的视野。这对于大规模商业化自动驾驶来说是一个很大的障碍。

数据量庞大:激光雷达每秒可以产生数百万个点云数据,这些数据需要大量的计算资源和存储空间来处理和分析。而且,并不是所有的点云数据都对自动驾驶有意义,需要进行筛选和压缩。这会增加系统的复杂度和延迟。
信息量有限:激光雷达虽然可以提供精确的距离信息,但是却无法提供颜色、纹理、形状等细节信息。这些信息对于识别物体的类型、状态、意图等非常重要。比如,激光雷达无法区分红绿灯的颜色,无法识别交通标志的内容,无法判断行人的姿态和方向等。

技术局限:激光雷达是一种基于主动发射的传感器,它需要向外发射激光束,并接收反射回来的信号。这种方式有一些固有的局限性,比如,激光束可能被遮挡或者反射,导致信号丢失或者干扰;激光束可能对人眼或者其他传感器造成伤害或者干扰;激光束可能受到环境因素的影响,比如雨雾、雪、灰尘等。
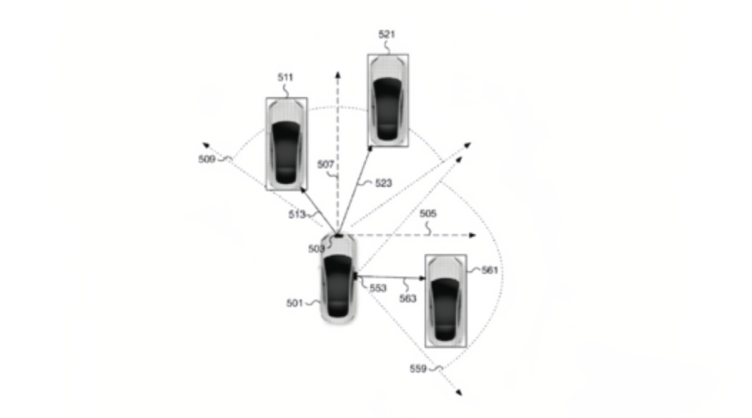
综上所述,特斯拉认为激光雷达是一种不必要的、昂贵的、低效的、有缺陷的传感器,它不能提供足够的信息来实现自动驾驶,而且会增加系统的复杂度和成本。特斯拉认为,人类可以通过双眼来驾驶汽车,那么汽车也可以通过摄像头来实现自动驾驶。因此,特斯拉选择了纯视觉方案,即只使用8个摄像头来进行自动驾驶。
特斯拉的纯视觉方案有什么优势呢?它是如何利用视觉神经网络和算法,实现纯视觉自动驾驶的呢?

特斯拉的纯视觉方案有以下几个主要优势:
成本低廉:摄像头是一种非常便宜的传感器,目前市场上最贵的摄像头也不过几百美元,而且只需要8个摄像头就可以覆盖360度的视野。这对于大规模商业化自动驾驶来说是一个很大的优势。
数据量适中:摄像头每秒可以产生数百万个像素数据,这些数据相比于点云数据来说更加紧凑和易于处理。而且,摄像头数据可以提供更多的信息量,比如颜色、纹理、形状等细节信息。这些信息对于识别物体的类型、状态、意图等非常重要。
信息量丰富:摄像头可以提供与人眼相似的视觉信息,这些信息可以帮助汽车理解周围环境的语义和情境。比如,摄像头可以区分红绿灯的颜色,可以识别交通标志的内容,可以判断行人的姿态和方向等。
技术先进:摄像头是一种基于被动接收的传感器,它不需要向外发射任何信号,只需要接收外界光线。这种方式有一些固有的优势,比如,摄像头不会被遮挡或者反射,不会对人眼或者其他传感器造成伤害或者干扰;摄像头不会受到环境因素的影响,比如雨雾、雪、灰尘等。
为了实现纯视觉自动驾驶,特斯拉采用了以下几个关键技术:
自研芯片:特斯拉自主开发了全球最先进的自动驾驶芯片,即FSD芯片(Full Self-Driving Chip)。这是一款专为自动驾驶而设计的芯片,拥有强大的计算能力和图像处理速度,能够快速处理摄像头捕捉到的画面。FSD芯片采用了14纳米工艺,集成了60亿个晶体管,拥有两个神经网络加速器,每秒可以处理144万亿次浮点运算。FSD芯片还具有高效的能耗管理和散热系统,可以在低功耗的情况下保持高性能。
视觉神经网络:特斯拉使用了多个视觉神经网络模型,来实现对摄像头数据的分析和理解。这些模型分别负责不同的任务,比如物体检测、语义分割、深度估计、光流计算等。这些模型都是基于深度学习的方法,可以通过大量的数据来进行训练和优化。特斯拉利用其庞大的车辆网络,收集了数十亿张真实驾驶场景的图片,来作为训练数据。这些图片涵盖了各种复杂的路况、天气、光照、交通规则等,可以帮助模型提高其泛化能力和鲁棒性。

合成数据和仿真环境:除了真实数据之外,特斯拉还使用了合成数据和仿真环境,来进行算法的训练和测试。合成数据是指通过计算机生成的虚拟图片,可以模拟各种可能出现的情况,比如障碍物、动态物体、异常事件等。合成数据可以增加数据的多样性和覆盖率,也可以避免一些真实数据难以获取或者存在噪声的问题。仿真环境是指通过计算机构建的虚拟场景,可以模拟真实驾驶过程中的各种交互和反馈。仿真环境可以用来测试算法在不同场景下的表现和效果,也可以用来评估算法对于安全性、可靠性、稳定性等方面的影响。
通过以上几个关键技术,特斯拉成功地实现了纯视觉自动驾驶方案,并在多种真实驾驶场景中展示了其优势。特斯拉已经在部分地区开放了其FSD Beta版本,让部分车主体验其最新的自动驾驶功能。特斯拉还发布了一些视频,展示了其纯视觉自动驾驶在城市道路、高速公路、乡村道路等不同环境下的表现。从视频中可以看出,特斯拉的纯视觉自动驾驶能够识别道路标识、信号灯、减速带等,并做出相应的动作。特斯拉还帮助车主避免了一些潜在的事故,比如避让突然出现的行人或者动物等。

总之,特斯拉用8个摄像头和自研芯片,打造了一个全新的3D成像系统,为什么特斯拉不需要激光雷达?看看它是如何利用视觉神经网络和算法,实现纯视觉自动驾驶的。特斯拉的纯视觉方案是一种颠覆传统的自动驾驶技术,它不仅降低了成本和复杂度,还提高了信息量和性能。特斯拉的纯视觉方案也展示了其对于自动驾驶的愿景和信心,它希望通过不断的创新和优化,让自动驾驶成为人类生活的一部分。特斯拉的纯视觉方案是否真的能够超越人类,实现全面的自动驾驶呢?我们拭目以待。