CAN总线在新能源汽车中的通信网络设计及应用分析
从事汽车相关行业的小伙伴们,都知道CAN总线,它是当今汽车各电控单元之间通信的总线标准,现在几乎所有的汽车厂家都选择使用CAN总线通信。CAN总线起初便是基于BOSCH公司为了解决汽车的电子控制单元增多带来的布线空间矛盾、汽车重量增加等诸多问题而诞生的。同时,CAN总线将汽车内部各电控单元之间连接成一个局域网络,实现了信息的共享,大大减少了汽车的线束。新能源汽车更多资讯在“优能工程师”,由易到难,由浅入深,全方位学习,维信馆主。
本文引用地址: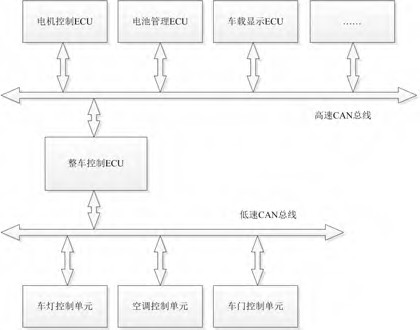
图 1 整车 CAN 网络的结构图
一、整车框图
BMS 控制网络只是整车通信网络的一小部分,而在电动汽车通信网络中,除了 CAN,还有其他协调的通信网络, 如 LIN、Ethernet、Flexray(高端车型)等。由此看来,汽车 ECU 单元间的通信网络本身就是一个复杂而庞大的系统,本文介绍的 BMS 电池组 CAN 网络将通过电池管理ECU 连接至整车 CAN 网络。
 图 2 BMS 通信网络
图 2 BMS 通信网络
二、基于 CAN 网络的BMS 通信系统
如图所示 BMS 中核心控制器采用 NXP 的 S32K144,该 MCU 为 Cortex M4 内核,最高工作频率可达112 MHz,内置了 48 MHz 的 RC 振荡器,带有 3 个 CAN 接口,其中 1 路支持 CAN FD 协议,当 CAN FD 配置为可变速率时,其数据域最高位速率可达到 8 Mbit/s。使用 S32K144 完成对电池组的状态监测及与整车主控制器的通信,简化开发流程,通信效率也会大幅提升。
新能源汽车采用的动力电池电压较高,其内部由电池单芯组成电池组,再由数个电池组通过串并联方式组成整个动力电池包,以提高动力电池的输出能力。其输出电压通常会达到 300V,有些甚至高达 600V, 在搭建电池与整车的监测与通信网络时,电池组的高压系统与整车通信网络之间的是大家首要解决的问题。
整个 BMS 控制系统包含一个 BMS 主控单元及数个 BMS 从控单元,从控单元完成对整个动力电池中的独立电池组进行监控管理,并将数据上传至主控 BMS 中,电池内部 BMS 从控单元通信采用传统 CAN 网络,主控与整车采用多个 CAN 接口,完成数据、控制、显示等信号的传输。
对动力电池组的监控部分供电采用 DC-DC 隔离电源,数据采集控制器处理采集的各项电池信号,通过隔离 CAN 模块发送至 BMS 主控制器。
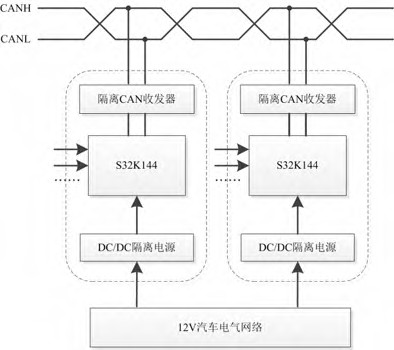
图 3 从控单元 CAN 网络设计
三、BMS 间的电气隔离
汽车内部通常采用的是 12V 蓄电池供电系统,要完成对高压电池组的管理监控,必须实现可靠的电源及信号隔离,本设计中需要对每个独立电池组的 BMS 从控单元进行电源和通信的电气隔离,如图 2 所示。
BMS 的通信网络主要包括两部分,动力电池内部的 BMS 从控单元的 CAN 通信网络以及 BMS 主控单元与整车的 CAN 通信网络。由于动力电池是由内部的多个电池组串并联形成的,各个电池组之间都有一定的电压差,每个电池组的 BMS 都以该电池组的地作为系统的参考地进行电池组的数据采样, 因此 BMS 从控单元间的数据通信可采用隔离模块。目前常用的隔离 CAN 接口及隔离电源的隔离电压等级有 2500VDC、3 000VDC 和 3500VDC 等多个等级,这些可满足动力电池内部的隔离要求。隔离电源可选用致远的 ZY2405WRFCS-3W 模块, 该模块输入电压 9~18VDC,隔离电压 3 000VDC。CAN 接口隔离可选用 CTM1051KT,其通信速率范围 40k~1 Mbit/s,隔离电压 3 500VDC。
BMS 主控单元与从控单元已经实现了电源与信号的隔离,
因此 BMS 与整车进行通信的电气硬件连接时不需要使用隔离模块。BMS 主控单元的 CAN 接口可使用 TJA1051 通用 CAN 收发器实现。CAN FD 接口驱动可采用 NXP 的 TJA1044GTK 实现,其最高通信速率达到 5 Mbit/s,可实现电池组状态数据及控制数据的传输。
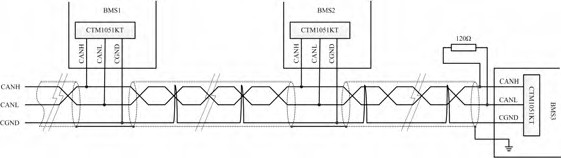
图 4 CAN 总线组网设计
四、抗干扰设计
高效可靠的通信除了必要的接口隔离,汽车每个控制系统通信网络的抗干扰设计也不可或缺。动力电池内部常有高压大电流线束,这些线束通常会对通信网络造成干扰。CAN 总线网络中信号传输的介质为双绞线,选用合适的双绞线,会使整车网络的抗干扰能力大幅提升。汽车内部的各个 ECU 之间的电气连接线都是捆扎在一起的,这些线束通常会包含各种控制信号线,通信网络线,ECU 的电源线等,电池组内部也是如此,这些通信网络线通常离电池的动力线较近,其受到的干扰也最大,而对于当今的电动车,整车的 ECU 单元也越来越多,CAN 总线网络受到的电磁干扰也更加严重,因此对于电池组的 CAN 通信网络抗干扰设计要格外注意。
如图 4 给出了使用双层屏蔽线组网的示意图,针对图 4 可总结为以下几个方面来提高网络的抗干扰能力:
使用双层屏蔽双绞线,外屏蔽层单点接大地,其中 CGND 通过 102 电容接机壳;
各个 BMS 单元接入总线主干网的电缆尽可能短;
CAN 网络尽量远离动力线,离开12V 电源线及控制线;
BMS 接入整车网络的接口套磁环。

五、CAN总线通信的优点
1.提高整个系统的可靠性。
2.减少各种线束数量,减小线束横截面积,布线灵活,降低布线成本。
3.可多重使用传感器。
4.能够传输复杂数据。
5.进行系统变更时更具灵活性,随时能够扩展数据范围。
6.为客户实现新型功能。
7.有效诊断。
8.降低硬件成本。
相比于,目前流行的以太网和485总线,CAN总线具有以下的特点:总线访问——非破坏性仲裁的载波侦听、多路访问、冲突避免;多主机广播式结构,自动优先级仲裁,实时性很强;传输错误自动重发,自动CRC校验接收,数据出错率极低;差分信号传输抗干扰能力强,适合汽车内部强干扰的环境;硬件报文滤波功能,减轻CPU负担。
基于以上的特点,CAN总线能保证实时可靠的数据传输,保证汽车整车网络的通讯正常,在新能源汽车行业具有不可替代的地位。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。