从现在开始,我们开始来实现 总线-设备-驱动模型中的总线。、
我们这个程序的目标是在 sysfs文件系统的/sys/bus/ 目录下面建立一个文件夹。
一、总线介绍
1. 总线数据结构bus_type
struct bus_type 结构体的定义如下:
|
struct bus_type { const char *name; --总线名 struct bus_attribute *bus_attrs; --总线属性 struct device_attribute *dev_attrs; --总线设备属性 struct driver_attribute *drv_attrs; --总线驱动属性 以下的函数会在设备注册或驱动注册的时候调用。
int (*match)(struct device *dev, struct device_driver *drv); --实现设备与驱动的匹配。不同的总线实现匹配的方法不同,如platform总线采用name匹配,而usb_bus采用id匹配
int (*uevent)(struct device *dev, struct kobj_uevent_env *env); int (*probe)(struct device *dev); --在2.6的内核中实现一个设备与驱动的探测。主要是因为热插拔的设备的增多。
int (*remove)(struct device *dev); --移除设备 void (*shutdown)(struct device *dev); --关闭设备 int (*suspend)(struct device *dev, pm_message_t state); int (*suspend_late)(struct device *dev, pm_message_t state); int (*resume_early)(struct device *dev); int (*resume)(struct device *dev);
struct dev_pm_ops *pm; --电源管理 struct bus_type_private *p; --bus_type私有成员, 这个结构体中主要包括了kset以及klist,用于管理其挂载其总线下的设备和驱动 }; |
下面我们来看看bus_type_private结构体
|
struct bus_type_private { struct kset subsys; /*代表该bus子系统,里面的kobj是该bus的主kobj,最顶层*/ struct kset *drivers_kset; /* 挂接到该总线上所有的驱动的集合 */ struct kset *devices_kset; /* 挂接到该总线上所有的设备的集合 */ struct klist klist_devices; /* 总线上所有设备的的列表 */ struct klist klist_drivers; /* 总线上所有驱动的的列表 */ struct blocking_notifier_head bus_notifier; unsigned int drivers_autoprobe:1; /*设置是否在注册驱动时,自动探测(probe)设备*/ struct bus_type *bus; /*回指包含自己的总线*/ }; |
2. 注册总线
内核中采用bus_register来注册一个新的总线。
其使用如:ret = bus_register(&my_bus_type);
bus_register函数的源码如下(剔除一些错误处理):
|
int bus_register(struct bus_type *bus) { int retval; struct bus_type_private *priv; priv = kzalloc(sizeof(struct bus_type_private), GFP_KERNEL); priv->bus = bus; bus->p = priv; BLOCKING_INIT_NOTIFIER_HEAD(&priv->bus_notifier); retval = kobject_set_name(&priv->subsys.kobj, '%s', bus->name); //设置kobject名称,有时会使用snprintf来设置,不过会出现bug,最好使用该函数。
priv->subsys.kobj.kset = bus_kset; //kobj中的kset指向父kset priv->subsys.kobj.ktype = &bus_ktype; //kobj中的ktype指向父ktype priv->drivers_autoprobe = 1; //设置总线下的设备和驱动自动探测 retval = kset_register(&priv->subsys); //注册kset,关于kset,kobject,以及ktype的关系以后在学习
retval = bus_create_file(bus, &bus_attr_uevent); //创建bus的文件属性 priv->devices_kset = kset_create_and_add('devices', NULL,&priv->subsys.kobj); //在父kset下创建和加入名为devices和drivers的kset
priv->drivers_kset = kset_create_and_add('drivers', NULL,&priv->subsys.kobj); klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put); //初始化klist,这个函数主要是实现一些赋值及初始化的功能
klist_init(&priv->klist_drivers, NULL, NULL); retval = add_probe_files(bus); //主要是创建该bus下probe的属性文件,可以通过cat file 和cat x > file 向属性文件读出和写入数据。
retval = bus_add_attrs(bus); --添加bus自带的属性文件 return 0; } |
从上面的程序得知,总线注册主要工作如下
创建bus_type_ private,并申请相应的内存,通过赋值bus_type的一些属性,然后添加进入list
下面函数其实是实现一个从链表的节点,查询到该节点所属的设备,并且减少dev的计数。
|
static void klist_devices_get(struct klist_node *n) { struct device *dev = container_of(n, struct device, knode_bus); get_device(dev); } |
其实bus的注册比较简单,说到底还是kset和kobject控制着这一切,抛开kset和kobject的具体实现,bus还是很好理解的。
3. 创建属性文件
static BUS_ATTR(version, S_IRUGO, show_bus_version, NULL);
通过BUS_ATTR宏定义定义一个属性文件,其参数依次是属性文件名,属性文件的mode,显示属性文件函数和存储属性文件函数。
显示属性文件的函数如下所示:
|
static ssize_t show_bus_version(struct bus_type *bus, char *buf){ return snprintf(buf, PAGE_SIZE, '%sn', Version); } |
创建属性文件:
bus_create_file(&my_bus_type, &bus_attr_version)
其实原理上,它就是调用sysfs_create_file函数来实现的。
4. bus的注销
bus的卸载函数如下所示:
bus_unregister(&my_bus_type);
二、总线实例介绍
1. 定义bus_type结构体
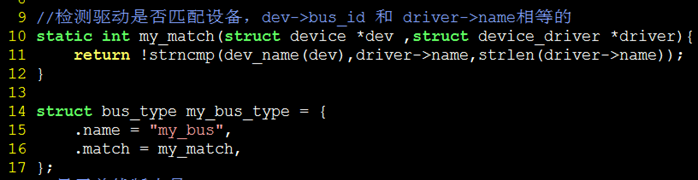
以及实现.match的my_match函数,用于检测驱动与设备是否匹配
2. 定义bus属性文件结构体

上面的version是我们前面定义的一个字符串

3. 在init函数中注册总线

如图所示,
bus_register(&my_bus_type); 用于注册我们的总线,加入总线列表list,具体功能看前面
bus_create_file(&my_bus_type, &bus_attr_version); 创建我们my_bus_type 的属性文件
&bus_attr_version 这个结构体就是前面我们
static BUS_ATTR(version, S_IRUGO, show_bus_version, NULL); 得到的。
查看linux源码如下:

4. 在exit函数中卸载总线

至止,我们已经实现了 总线-驱动-设备 模型中的总线了
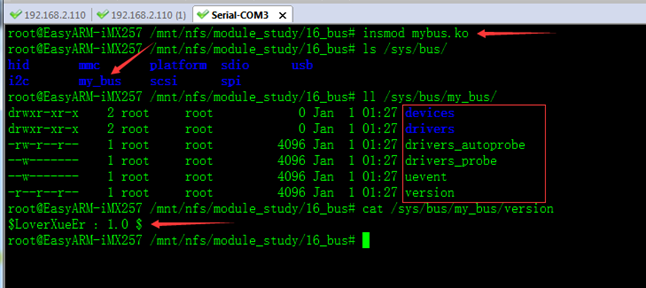
5. 编译测试
附上源代码:
1 #include
2 #include
3 #include
4 #include
5 #include
6
7 static char *Version = '$LoverXueEr : 1.0 $';
8
9 //检测驱动是否匹配设备,dev->bus_id 和 driver->name相等的
10 static int my_match(struct device *dev ,struct device_driver *driver){
11 return !strncmp(dev_name(dev),driver->name,strlen(driver->name));
12 }
13
14 struct bus_type my_bus_type = {
15 .name = 'my_bus',
16 .match = my_match,
17 };
18 //显示总线版本号
19 static ssize_t show_bus_version(struct bus_type *bus,char *buf){
20 return snprintf(buf,PAGE_SIZE,'%sn',Version);
21 }
22
23 //产生后面的 bus_attr_version 结构体
24 static BUS_ATTR(version,S_IRUGO, show_bus_version, NULL);
25
26 static int __init my_bus_init(void){
27 int ret;
28 /* 注册总线 */
29 ret = bus_register(&my_bus_type);
30 if(ret)
31 return ret;
32 /* 创建属性文件 */
33 if(bus_create_file(&my_bus_type, &bus_attr_version))
34 printk('<0>Fail to create version attribute! n');
35 return ret;
36 }
37
38 static void my_bus_exit(void){
39 bus_unregister(&my_bus_type);
40 }
41
42 module_init(my_bus_init);
43 module_exit(my_bus_exit);
44
45
46 MODULE_AUTHOR('Lover雪儿');
47 MODULE_LICENSE('GPL');









