前言
在汽车产业发生重大变革的时代,电动化、网联化以及智能化成为了研究发展的重要领域,高度智能化的新型汽车需要具备更智能、更安全、更可靠的底盘执行机构。线控制动技术是智能化底盘的核心技术之一,为了适应智能化汽车的多场景应用,线控制动系统不仅需要实现常规的制动助力功能来满足人工制动,还需要具备主动制动、动力学状态信息预测等智能化的技术。英创汇智经过多年的技术打磨和积累,在线控制动产品系列中不断进行创新和集成,研发出适应未来智能汽车的智能线控制动系统解决方案(T-IBWS),目前该解决方案已经与ESC-Pro产品完美契合,在ESC原有动力学控制功能(ABS、TCS、AYC等)的基础上,集成ADAS支持功能,为AEB、ACC、APA等功能提供安全舒适的控制执行接口,同时支持实时胎压监测以及基于视觉的路面附着系数预测,全方位保证智能汽车行驶安全。
一、电动智能化汽车快速发展
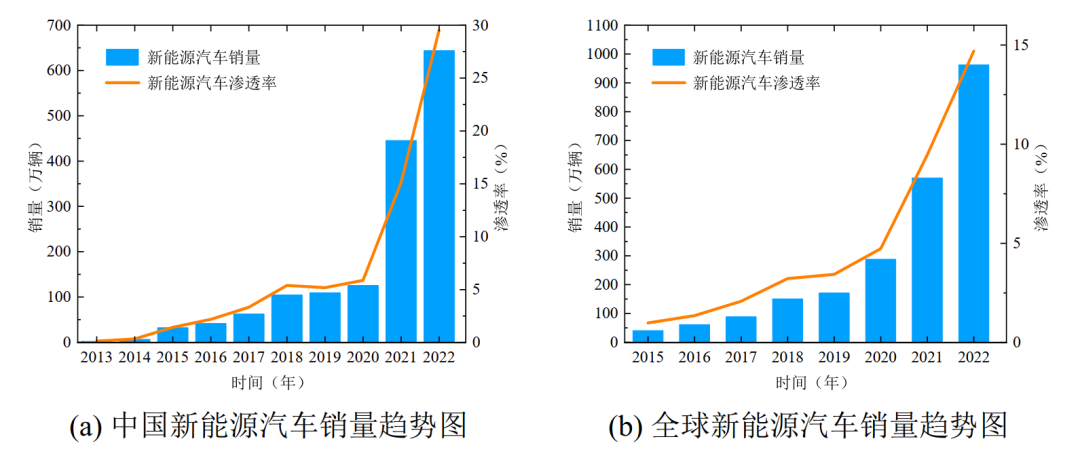
新能源汽车作为智能网联汽车的重要载体,近些年在我国政府补贴政策的支持下发展迅速,同时为了实现能源消耗结构的转型,大力发展新能源汽车也是必经之路,近年来国内外新能源汽车的销量和渗透率逐年增加。
同时,人工智能的快速发展和汽车电动化的日益普及促使了研发人员对汽车智能化进行不断探索,根据国际汽车工程师协会发布的自动驾驶等级分级标准,自动驾驶汽车按照智能化程度可分为五个级别,自动驾驶等级越高,对车辆控制精度以及可靠性要求就越高,而制动系统是车辆控制的核心部件,为了应对高级别自动驾驶的需求,线控制动系统必须具有较高的控制精度、较快的响应速度以及较舒适的主观体验。当前,L2 级高级辅助驾驶系统逐渐成为了车辆的标配, AEB、ACC、APA等功能均需要底盘制动系统的主动制动控制,即在无驾驶员介入时可自动实现车辆减速。此外,随着自动驾驶级别的提高,车辆监测自身运行状态的能力也需要随之提升,车辆需要替代驾驶员对车辆自身状态信息进行实时观测甚至预测,才能提前规避风险工况,保证上层规划和底层控制都能够让车辆一直处于动力学稳定性区间内。
二、智能线控制动系统解决方案
经过不断的技术迭代,T-IBWS目前已经推出三代产品。
T-IBWS 1.0是为了支持ADAS功能而开发的第一代智能线控制动系统解决方案,该方案当前选用ESC-Pro作为线控制动执行器,同时保留基础的车辆动力学控制功能,是一种低成本,快量产的解决方案。
T-IBWS 2.0在1.0的基础上加入智能胎压监测系统(Tri-TPMS),车辆在高速紧急制动时可以根据胎压信息进行四轮制动力主动调节或功能降级,避免出现因两侧车轮胎压不一致而造成严重的制动跑偏现象。
T-IBWS 3.0在2.0的基础上加入基于视觉信息的路面附着系数预测(V-RAC),主要集成在底盘域控制器中,未来智能汽车的电子电器架构将分为不同控制域,不同控制区域之间的信息交互更强,传感器信息维度更广。底盘域会利用智能驾驶域的信息进行多维度动力学信息观测,更精确地掌控车辆状态,而智能驾驶域也会利用底盘域的车辆动力学信息进行规划决策,提前预知车辆危险状态。

T-IBWS
基于T-IBWS 3.0解决方案,下面对各模块进行单独介绍。
三、英创汇智ESC-Pro系统
ESC-Pro为ESC-Base的升级系列,是专门为ADAS底层控制开发的一款ESC适配产品,能够满足ACC、AEB、APA的加速度、速度以及距离的控制需求,相对于ESC-Base产品,其主要的特点为:
1. 支持ACC、AEB、APA等上层ADAS功能的制动控制、扭矩控制以及合理的扭矩制动切换。
2.更高的减速度控制精度,减速度稳态控制精度小于0.2m/s2
3. 更快的压力响应时间,AEB中TT+TTL总和小于600ms。
4. 更小的主动增压噪声,有效提高行驶舒适性。
5. 具备ESC-Base全部的车辆动力学控制功能。
ESC-Pro外形图

ESC-Pro功能列表
硬件方案:液压原理与设计
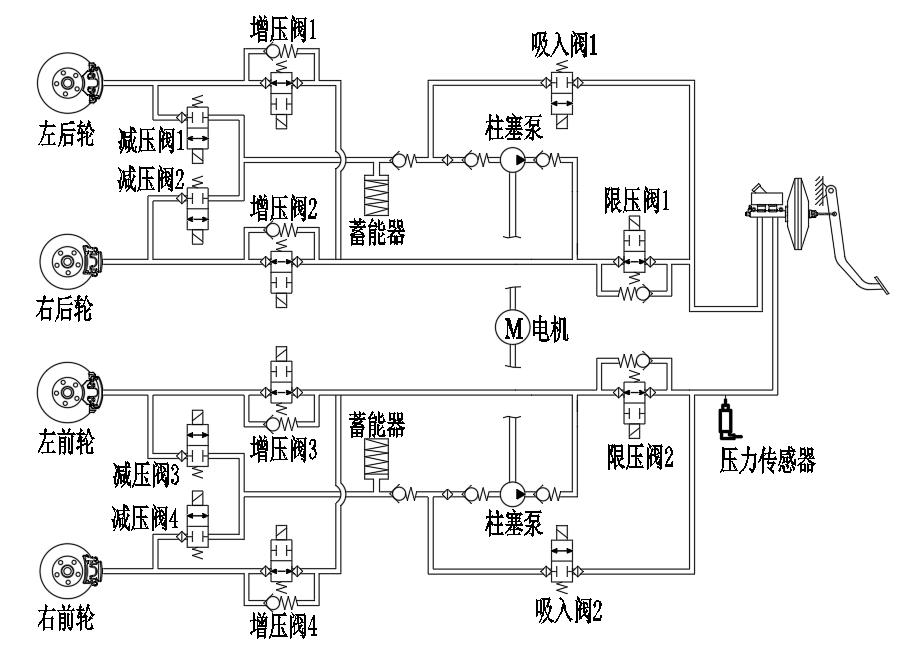
平台化设计:与Base版本相同液压原理、核心元件共用、相同的外部边界。
系列化设计:提供3ml5ml7ml蓄能器设计,满足6吨以下车型需求;提供EPBi构型。
更快的主动建压速度:550ms for B+ class vehicle。
更精准的压力调控精度:最小0.2MPa压力调控精度。
优化NVH性能:较Base版本提升4db以上。
更高寿命等级:满足31万次极限工况耐久。
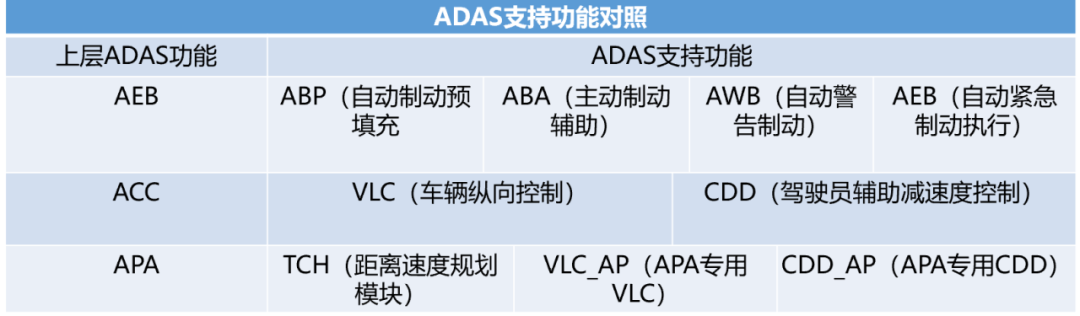
软件方案:ADAS支持功能适配
根据上层ADAS功能(AEB、ACC、APA等)的需求,ESC能够提供执行层的支持功能,根据上层控制指令以及车辆实际状态,ESC对发动机扭矩和液压控制单元的压力进行协调控制,保证执行层对压力和扭矩控制的精确性、稳定性和安全性。
ESC-Pro系统关键技术
以APA为例,上层APA功能根据感知系统的融合信息,寻找到目标车位后,通过路径规划模块计算合理的车辆行驶路径,根据当前车辆位置以及目标路径,设定横向运动和纵向运动的控制目标,其中横向控制由转向系统负责,纵向控制由制动系统负责。为了支持APA的车辆纵向控制,ESC-Pro集成了TCH、VLC_AP、CDD_AP以及PSC功能。
由于上层APA直接发送目标距离给到线控制动系统,TCH需要在最高限定车速的范围内进行速度和加速度规划,使得规划曲线既能满足目标距离的精确控制,也能合理限制加速度范围,有效提高泊车过程中的舒适性。这里采用五次多项式路径规划策略,根据起始点和目标点的位置、速度以及加速度等信息,将五次多项式进行解算,从而得到目标速度和加速度曲线。
VLC全称为车辆纵向控制(Vehicle Longitudinal Control),而VLC_AP是在VLC的基础上针对低速泊车工况的纵向控制策略,VLC_AP根据TCH提供的加减速请求以及车辆当前状态,判断使用执行器的种类,通过主动控制发动机扭矩或者向CDD请求制动来调整要求的加减速度,从而保持车速和距离。
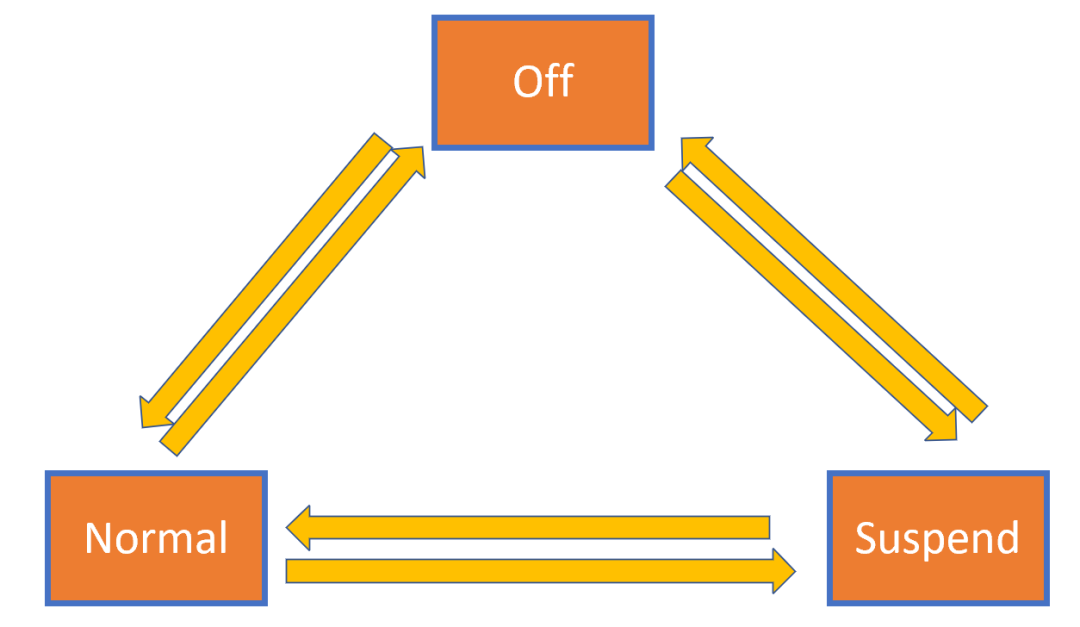
VLC状态机
CDD全称为适于驾驶员辅助系统的减速度控制(Controlled Deceleration for Driver Assistant System)功能,与VLC_AP类似,CDD_AP也是针对泊车工况进行适配的制动控制策略。在正常减速度控制模式下,CDD根据VLC的制动请求,考虑目标减速度和实际减速度的偏差,计算ESC液压系统的目标制动压力;另外,在车辆刹停-静止-起步阶段,CDD能够帮助车辆进行舒适刹停,防止急动度过大造成车内人员恐慌,在静止阶段对车辆进行保压,实时监测车辆静止状态,一旦车辆发生溜车现象,及时进行主动增压保证驻车安全,在起步过程中,根据轮端实时扭矩对制动压力进行缓慢释放,提高起步过程中的舒适性。
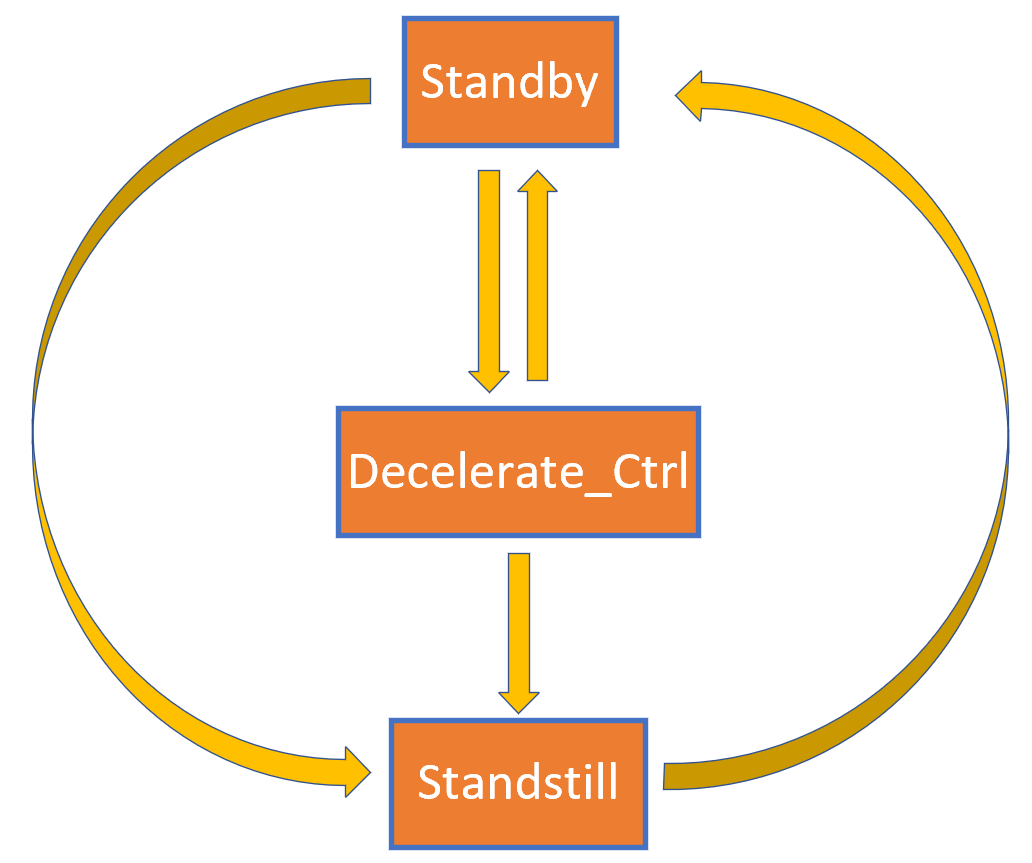
CDD状态机
PSC为液压系统控制模块,CDD_AP将目标压力发送给PSC后,PSC通过控制电机阀和电机来实现轮缸压力达到目标值,由于ESC-Pro采用全新的电磁阀和柱塞泵设计,PSC内部的液压单元参数需要重新标定,将液压系统内部各个单元进行精确建模,对ESC内部管路的流量和压力进行实时监测。同时基于目标制动压力与估计压力设置合理的压力控制策略,控制电磁阀和电机的占空比,从而实现精准的压力控制。
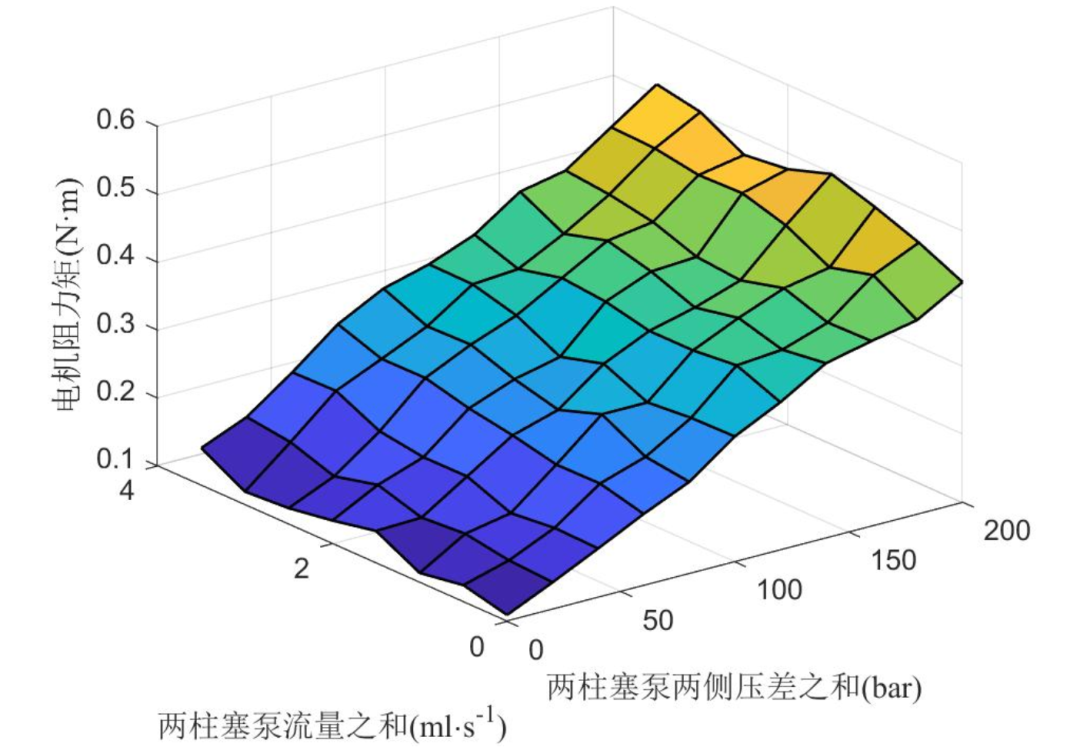
柱塞泵负载特性
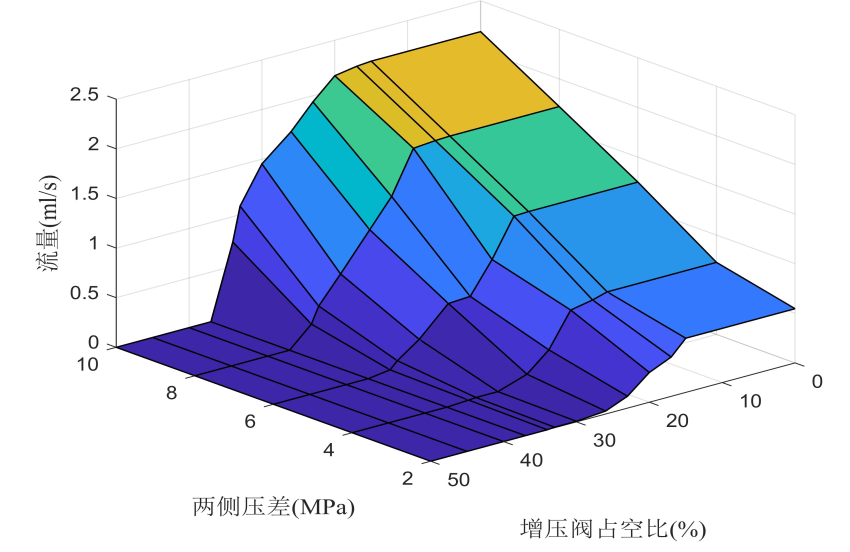
增压阀流量特性
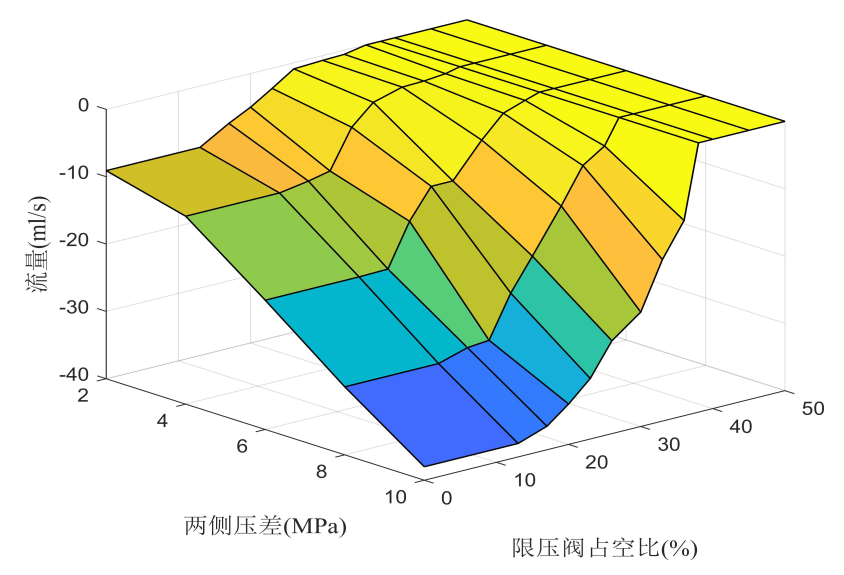
限压阀流量特性
当前,基于ESC-Pro线控制动系统的APA整车性能参数可以达到以下要求:
(1)保证APA 距离请求为 0 时 ESP 控制距离精度(绝对值)≤20cm;车辆最小起步车距15cm;
(2)车速超调量为限制车速的 50%或 1km/h中二者的最小值;APA功能支持的最大坡度 ≤5.5°(10%);
(3)满足车辆加速度值 ≤1.5 m/s² ;车辆加速度变化率 <15 m/s^3;
(4)满足紧急制动时ESP加速度值〉-5m/s² ;舒适性制动时ESP加速度值 >-1.5 m/s²;车辆减速度变化率 <15 m/s3;紧急制动时ESP制动响应时间 ≤500 ms。
四、智能胎压监测系统
英创汇智Tri-TPMS是英创基于自主技术研发的新一代间接式胎压监测系统(iTPMS),相较于内置胎压传感器方案,间接式胎压监测方案成本低、运算快、维护方便,仅依靠轮速信号完成胎压监测全功能的实现,但对算法的要求高,运算量大。英创汇智坚持自研间接式胎压核心技术,已经攻克上述难题,产品性能具备显著优势。
Tri-TPMS核心优势:
1.更短的报警时间:对于1-3轮的欠压工况可以在各种路段实现报警。
2.更广的速度区间:本司产品在 35—240km/h 内均可满足1-3轮欠压报警功能,四轮报警的速度范围可根据客户需求扩展。
3. 更快的报警速度:针对欧标要求,本司产品 1-3 轮欠压报警时间一般在 8 分钟以内(欧标要求10 分钟以内),4 轮欠压报警时间 15 分钟以内(欧标要求 60 分钟以内)。
在算法策略上,当前主流的间接式胎压监测算法有半径法和频率法。
半径法
半径法特点:
1、欠压轮胎半径减小,转速与其他胎有明显差异;
2、四轮同时欠压时无法监测;
3、对工况剔除的准确度依赖较高;
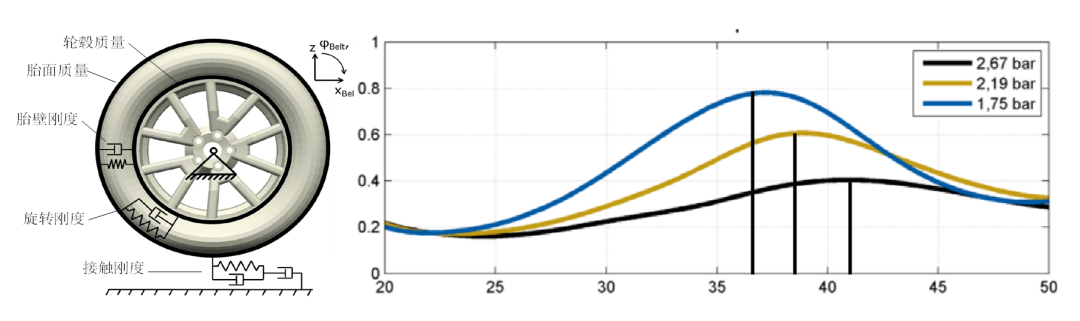
频率法
频率法特点:
1、车轮欠压时周向转动信号的固有频率降低;
2、可精准识别欠压状态;
3、算法复杂度高;
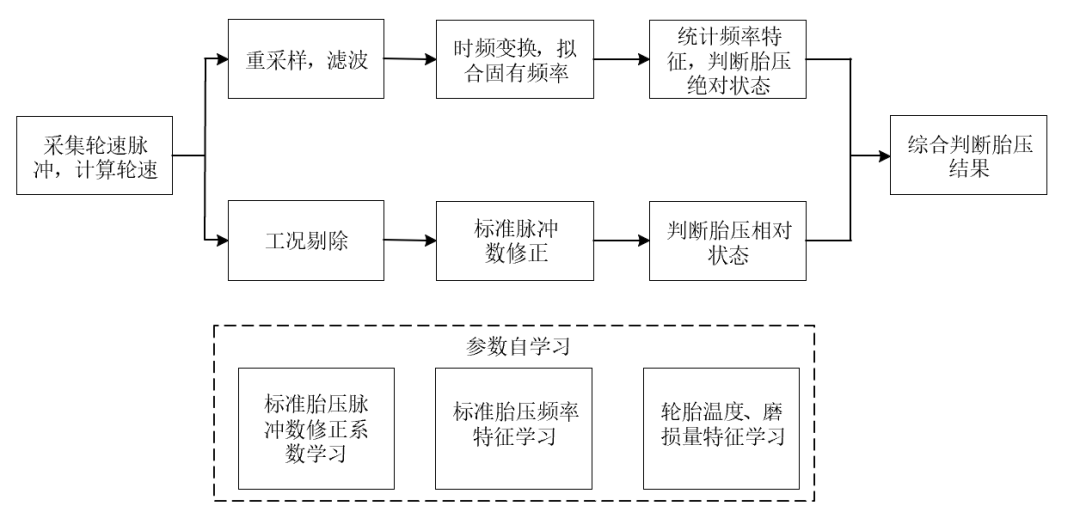
Tri-TPMS算法架构
英创汇智采用半径法和频率法融合算法以及弹性计算架构设计,完美规避了间接式胎压算法的固有缺点。利用半径法识别相对胎压,利用频率法识别绝对胎压,综合考虑二者结果,快速判断四轮胎压状态。
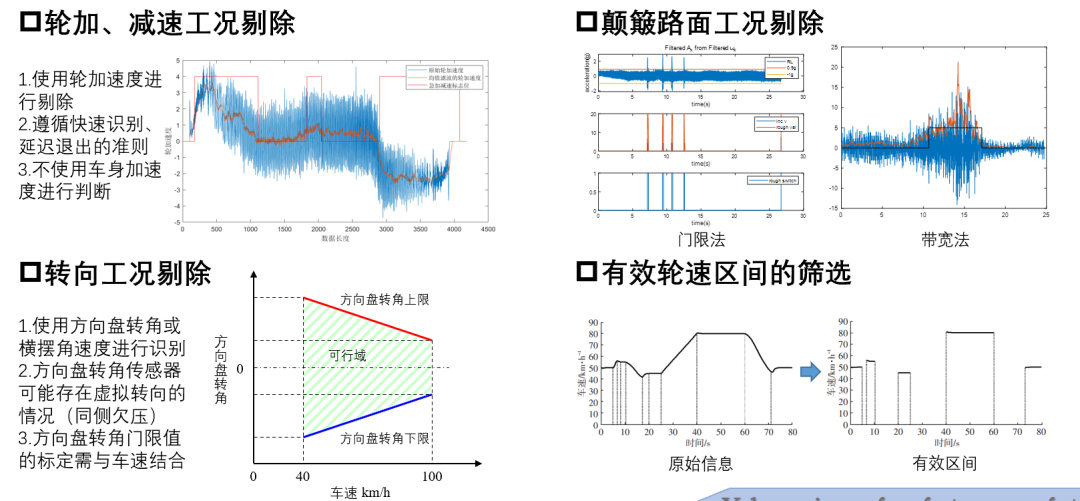
工况筛选策略
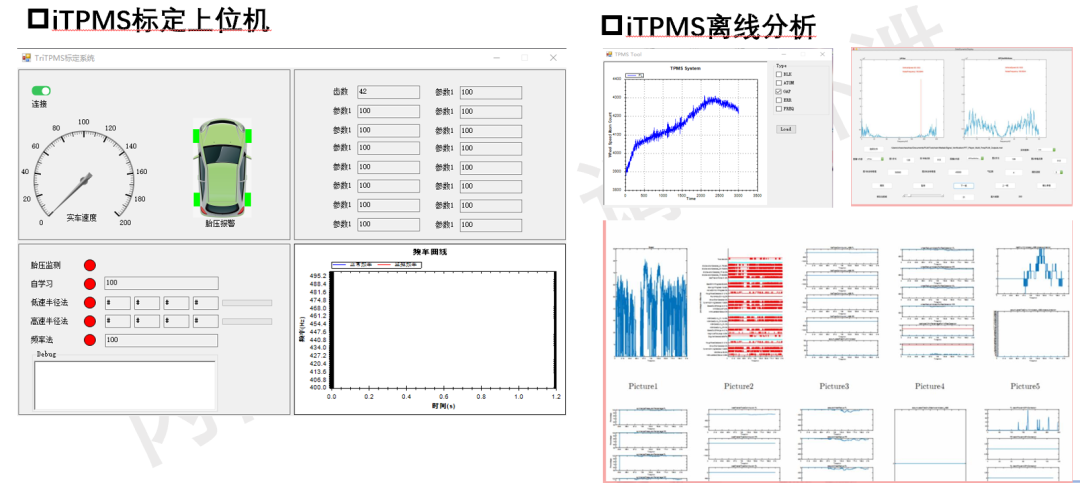
上位机标定系统
五、基于摄像头的路面附着系数预测
传统的路面附着系数估计策略主要利用车辆动力学信息进行观测,但只有当车辆与路面接触且车辆动态显现后才能够获得真实的路面附着信息,难免存在滞后性。随着汽车智能化的快速发展,越来越多的车辆搭载摄像头和雷达等先进传感器,基于视觉信息的路面附着系数预测方法借助车载前置摄像头提供的图片信息,利用深度学习技术对车辆前方路面附着系数进行识别,为后续ADAS的控制策略提供预测信息,提前做出控制指令,避免出现因路面附着不足而造成的上层目标指令与实际执行能力不匹配的现象。
随着深度学习的快速发展以及智能化传感器的加持,路面附着系数估计问题不仅仅局限于传统的动力学模型策略中,可以进一步将其归为图像分类问题,基于底盘域控制器的高算力平台,利用卷积神经网络将路面图像归类为不同附着系数等级,主要包括高附、中高附、中低附、低附四类路面情况(其中,路面附着系数0.7-1为高附,0.5-0.7为中高附,0.3-0.5为中低附,0-0.3为低附),在车辆前方提前预知路面状态,提前做出控制干预,保证车辆的动态稳定性。
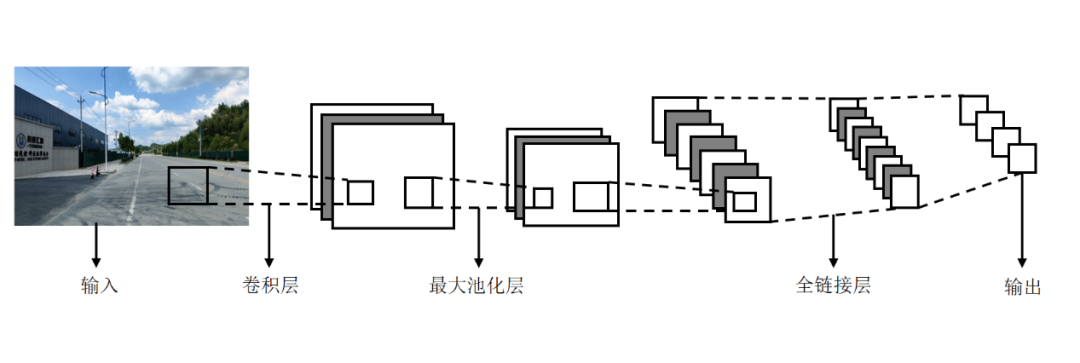
卷积神经网络结构
结语
当前,自动驾驶行业蓬勃发展,智能汽车“大脑”(智能驾驶层)发展迅速,车辆智能化水平显著提高,而智能汽车“小脑”(底盘执行层)能够配合“大脑”进行精准、安全的车辆控制,同样也是智能汽车的核心部件,基于完全自主可控的智能汽车“小脑”是国内汽车行业的“卡脖子”难题。英创汇智坚持自主研发,在线控底盘领域深耕多年,以T-IBWS为代表,自主开发了多款线控底盘系列产品。T-IBWS以线控制动执行器为核心,能够完全支持ADAS功能的底层控制需求,拥有多维车辆动力学信息观测策略,为驾驶员提供安全、舒适的乘车体验。
目前T-IBWS产品已经在奇瑞、北汽、吉利等多个车型中完成标定匹配,并且部分车型已经完成量产,该产品在耐久性、一致性以及安全性等多方面已经完成了详尽的测试验证。除ESC-Pro产品外,英创汇智线控制动全系列产品(T-booster2.0、T-IBC等)均能支持T-IBWS。
未来,基于英创汇智自研的底盘域控制器,将制动、转向、悬架、驱动等底盘执行器进行协同控制,进一步推出集成性更强、安全性更高的智能线控底盘一体化解决方案。
英创汇智坚持自主创新、开放交流,立志通过一流的产品和技术服务我国汽车工业自主可控战略目标,为民族汽车工业做大做强贡献力量!