






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服01
起源
行业发展需求
2022年下半年可以认为高速城快的智驾问题已经基本解决,在智驾方面投入巨大的华为、小鹏发现高速城快用车占比小于15%,智驾不能称为消费者购车的决定性因素,也就不能给庞大的研发投入买单。
为了进一步拓展智驾的适用范围,各家车企都将目光集中到了城区NOA,但是这个过程中面临了一个棘手的问题:城区高精地图的覆盖比例和鲜度远远不足!
虽然国家看到了行业难点并在2022年下半年自然资源部公布了北上广深杭重6个城市的智能网联高精地图应用试点,但是仍然面临着:开放城市数量不足、高精地图成本高、地图审核速度慢等难题。
这个过程需要经历的流程是:政策开放允许采集的城市名单-->图商依据资质采集制图-->自然资源部审核-->车企研发适配,大规模普及。上述流程需要2-3年的时间,对于在起跑线上就位的头部车企来说显然无法等待。
于是如何绕过高精地图就成为了行业探索的关键问题,这个过程中出现了一些名词:“SD+”、“SD pro”、众包建图、轻地图等等,这里需要说明下各家对“无图”的实际定义不同,但相同的一点是:无图是指不依赖高成本的高精度地图。
上述方案还是站在图商的角度从“建图”本身入手去解决地图的问题,并不是从车企智驾“用图”的实际需求上去解决城市NOA。

“星星之火”
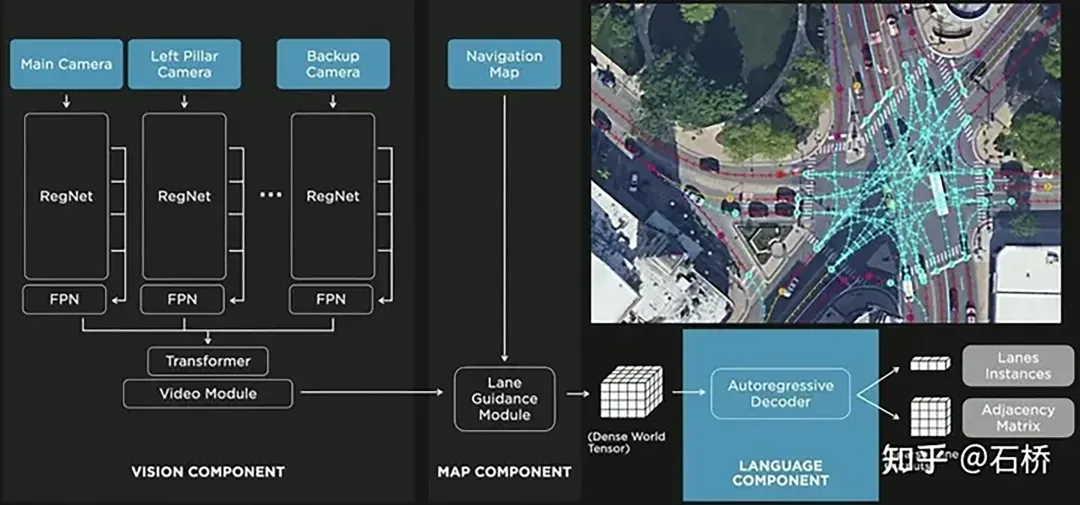
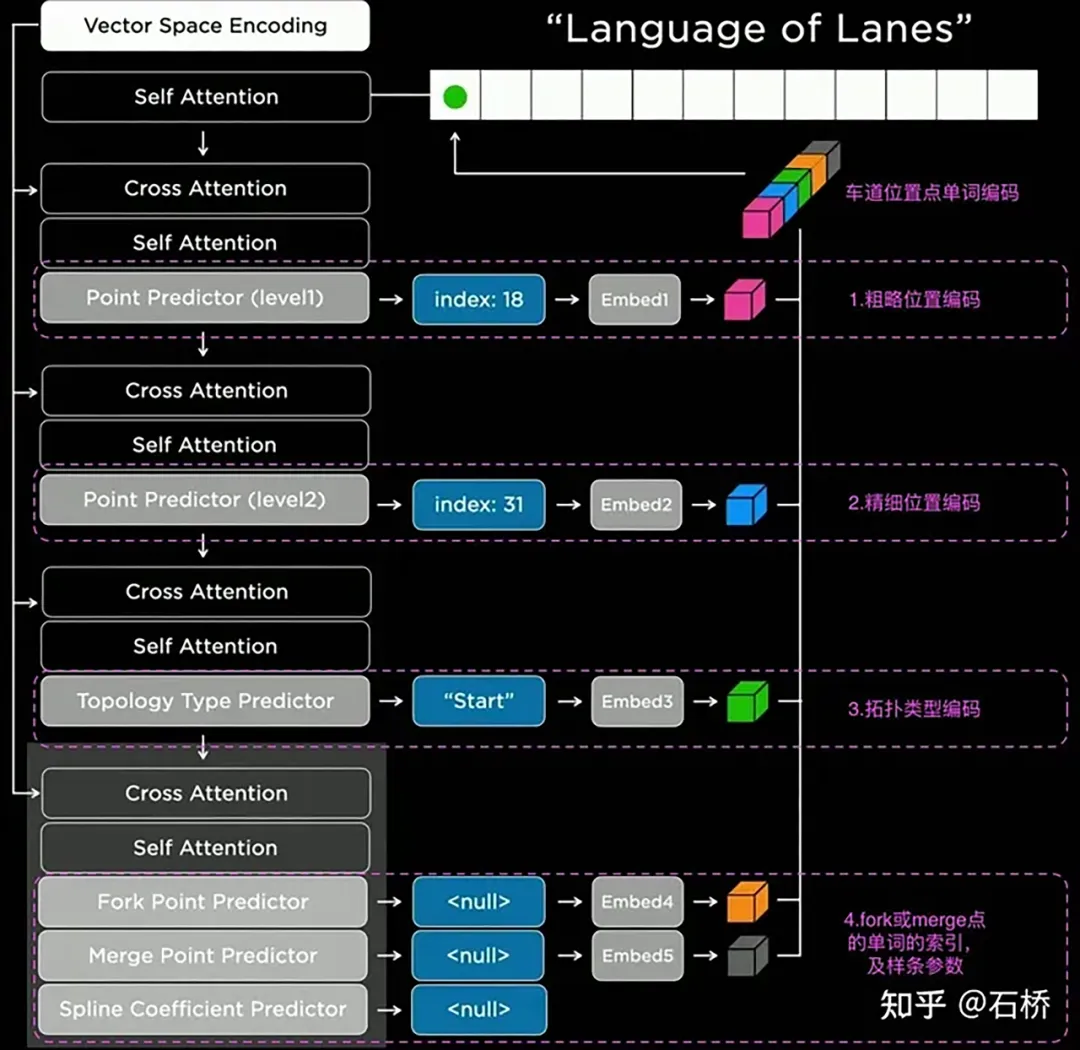
在2022年10月之前,关于行业的公开报道里极少提及“无图”方案,但是从2023年开始“无图”方案开始被大肆报道与传播。个人认为转折点发生在2022年10月1日的Tesla AI day上,特斯拉在提出的FSD Lanes Neural Network方案中仅使用SD地图中的道路的几何&拓扑关系,车道等级、数量、宽度、属性信息和Occupancy特征就能够构建出实时的车道级拓扑结构,从而结束了车道级拓扑结构只能从高精地图中获取的难点,在技术方案和落地实现上给出了高精地图的替代方案。

“燎原之势”

随着公认国内智驾第一梯队(华为、小鹏)的官宣加入,“无图”方案似乎已经成为智驾行业发展的趋势。
02
进展
特斯拉
从特斯拉2022年公开的方案上看特斯拉是没有使用高精地图的,其使用的是SD地图并且能够构建路口的拓扑结构信息。特斯拉具备建图能力,但主要用于提供训练数据的标注。
2023年特斯拉FSDv12版本已经走向了端到端的方案,从马斯克的视频上看目前端到端的能力与特斯拉之前的方案能力相近或稍弱一些,但其进化速度可能会非常快。
2019年左右百度就研发过端到端的小区自动泊车,类似于超级记忆泊车,场景受限很大。但相比于百度,特斯拉完全具备实现端到端的能力。总结来看:作为自动驾驶的全球领导者,特斯拉已经实现了"无图"方案。
小鹏
在2023年前,小鹏的智驾方案也是紧跟特斯拉,其感知XNet更加倚重纯视觉BEV,能够实现超强的环境感知能力,小鹏实现的“无图化”就是依靠XNet来实时构建“高精地图”达成的。
小鹏的无图NGP和有图NGP是同一套技术栈,差别仅仅是把原先高精地图的输入,换成了导航地图的输入和实时感知对导航信息的理解。为此,XNet需要感知距离的加长,提供决策规划需要的超视距的环境信息;同时通过学习大量的道路及路口特征,增强感知复杂道路结构的能力,据称XNet的总感知区域差不多有1.8个足球场那么大,纵向感知提升150%,横向提升200%。
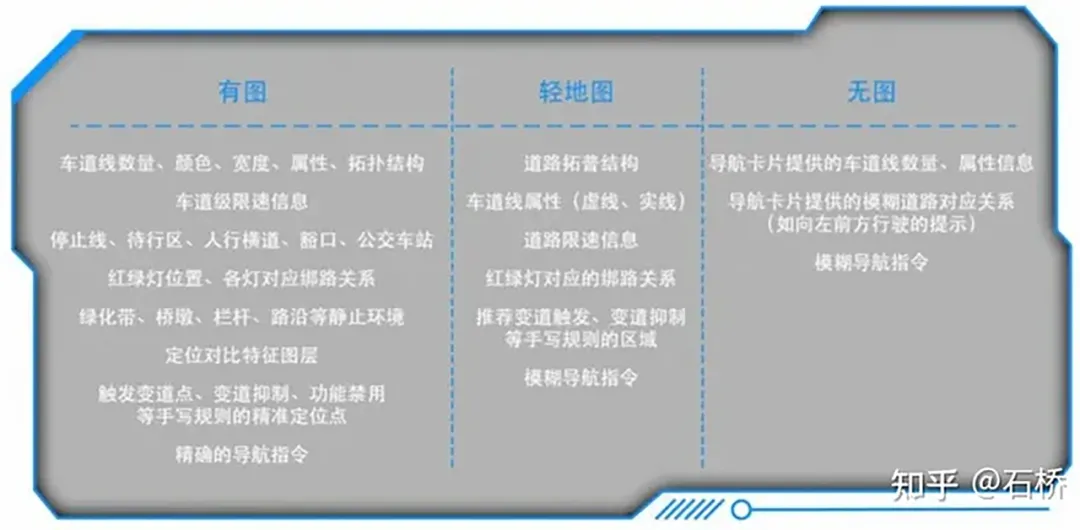
2023年上半年小鹏开始研发基于SD的无图方案,规划是到年底前开启无图方案,在无高精地图覆盖的城市开放自动变道、超车、左右转的能力。有图与“无图”的信息差别如下,“无图”所缺少的信息需要靠感知去获取。
下面的链接是小鹏“无图方案”在北京城区的工程版测试视频:
www.bilibili.com/video/BV16P411s7Gi/?spm_id_from=333.337.search-card.all.click&vd_source=31529ecc8856518eee69d6f19019dc5d
“无图方案”在路段行驶时基本没有问题,面临的主要还是路口的问题,可以看到在路口区域确实存在感知盲区,所以相应的决策会显得谨慎、迟疑。通过视频的对比和私下的接触了解,小鹏的“无图”方案真实存在,使用的确实只有SD地图,规控和决策更多的依赖实时感知到的信息。
从阶段上来说,目前小鹏的无图方案应该是处于从单个城市向多个城市泛化扩展的阶段,年底应该可以看到OTA到部分车型上,下周1024可能透露出更多详细信息。
小鹏“无图”方案相比有图方案具有泛化速度快4~10倍,彻底解决数据鲜度,降低成本普及智驾等优势。
除了“无图”方案外,小鹏还具有另外一种模式“AI”代驾,只需要学习一次即可启动城市NOA。“AI”代驾更多的是一种众包图和无图之间的模式,其学习过程中只会记忆导航点和转弯信息,实际运行过程中离不开“无图”能力,学习只是为了的提升体验和安全等。
主要是学习个性化的行车策略,并不是完全为了建图。从城区遇到的问题可以预见,面对高频变化的城区freespace的通行道路,智驾系统需要具备强大的实时感知和决策能力才行。

华为

从4月份华为上海车展前公开的信息可以看到,华为是采用激光+视觉的god网络与SD map实现“无图”方案。从实现上来说,华为采用激光去实现“occupancy”网络类似的功能,并且可以实时生成道路的拓扑结构,从传感器配置(激光+视觉)和基础网络(transformer)上来看,特斯拉、小鹏、华为的方案思路非常接近。
华为的规划是:Q3有15城普及无图方案,但是目前看没有实现,包括小鹏也一样没有实现flag。

下面看下华为工程版无图的测试效果:
www.bilibili.com/video/BV1Uh4y1Y7AJ/?spm_id_from=333.337.search-card.all.click&vd_source=31529ecc8856518eee69d6f19019dc5d
华为的智驾体验是胜过小鹏的,“无图”方案计划改为年底开放全国可用。华为最开始采用的众包建图,但是经过对上海的重建发现难度太大放弃了,目前从华为PR的宣传看all in了“无图”方案。
蔚来
蔚来的智驾能力一直被认为属于第二梯队,和华为、小鹏具有一定的差距,但是蔚来的智驾团队规模也很大。

从蔚来科技日上公开的信息看,蔚来的“无图”更偏向于众包建图方案,主要还是由于感知能力还没有提升到很高的程度,从上面的视频看也在做“无图”方案的探索,不过目前看短期内还无法大规模铺开,不像华为和小鹏那样有信心。
从技术发展趋势上看,蔚来建图内部也非常担忧“无图”方案,现在还处于方案论证阶段,且目前众包建图在蔚来看是更稳妥的。

理想
理想的“无图”方案是来自于清华的技术,主要是构建路口的特征用于协助实时感知建图。

NPN网络的结构如下:

在线语义地图预测:HDMapNet、LSS、VectorMapNet(单帧图像直接出矢量) 全局地图先验更新:直接更新替换对应位置的features 预测先验融合模块:局部位置嵌入、当前到先验的注意力模块、门控循环单元
目前理想内部也在大力推进NPN方案,其优点是理论上解决了地图的在线更新问题。但是实际效果暂时还不可知,而且像全国各个城市路口建图这种庞大的工程要落地,会遇到很多问题。
03
终局
因为智驾目前仍然处于发展的初期,转折点刚刚发生,所以很多方案还在落地实施中,并没有一个确定的答案,关于有图和“无图”的争论还将持续进行一段时间。这里谈谈个人的观察和思考:
-
在智驾领域,国内外的技术引领者是:特斯拉、华为、小鹏,这3家的方案基本都是all in了“无图”方案,跑在最前面的一般能看到更远的将来。 -
教会用户智驾认知的是:特斯拉、华为、小鹏,同样也会转变用户对“无图”的认知,目前来看,用户已经认为无图是一种更加先进的方案。不在于“无图”的体验是否会比有图更好,甚至会一定程度脱离实际体验。 -
“无图”本身就是一个伪命题,因为无论如何至少要使用导航图,如果“高精地图”不能普及和延续,那提升SD满足智驾城区NOA可能就会成为一个需求。 在一段时间内,基于安全、技术、体验上的考虑,有图方案还会存在一段时间,但是这里的有图也更多的是指众包建图,不需要花费高昂的成本,同时保证更新的频率。
相关文章









