2相和5相步进电机比较
2 相和 5 相步进电机比较
您已将运动控制解决方案的搜索范围缩小到步进电机。现在是决定 2 相还是 5 相的时候了?ORIENTAL MOTOR 制造两相 (1.8°/0.9°) 和五相 (0.72°/0.36°) 步进电机和驱动器。我们在这两种技术方面的经验为我们提供了独特的视角。ORIENTAL MOTOR 进行了逐项快速比较,以澄清 2 相与 5 相争论的困惑和迷思。该指南涵盖了两种技术在步进电机性能关键领域的基本差异:分辨率、振动、扭矩、精度和同步性。ORIENTAL MOTOR 经验丰富的技术支持人员也可以为这两种技术提供更深入的解释。
2相,5相,有什么区别?

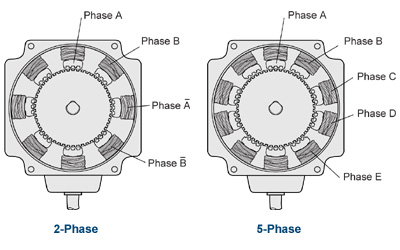
2 相和 5 相步进电机之间有两个主要区别。第一个是机械的。步进电机基本上由两部分组成,定子和转子。转子又由三个部件组成;转子杯 1、转子杯 2 和永磁体。在二相电机中,定子由 8 个带小齿的磁极组成,而五相电机定子由 10 个磁极组成。定子中的每个磁极均设有绕组。
2 相和 5 相的第二个区别是相数。两相电机有两个相,“A”相和“B”相,而五相电机有五个相。本质上,相数是指按顺序通电以吸引转子的不同磁极组合。
2相和5相头对头
这些差异如何影响性能?步进电机的性能涉及许多因素。驱动步进电机的方法有很多种,而驱动器会极大地影响电机的性能。Wave Drive、Full Step、Half Step 和 Microstep 是最常见的驱动方法,每种方法都提供截然不同的性能。在不考虑各种驱动方法的情况下,这里是 2 相和 5 相步进电机的关键性能领域。
解决
在结构上,5 相步进电机与 2 相电机没有太大区别。两个电机的转子都有 50 个齿。不同之处在于,因为 5 相电机有 10 个极,每相 2 个,转子只需移动 1/10 齿距即可与下一相对齐。在 2 相电机中,转子必须移动 1/4 个齿距以与下一相对齐(8 极,每相 4 个)。
这导致 2 相每转 200 步,每步 1.8°,而 5 相每转 500 步,每步 0.72°。5 相分辨率的提高是其设计所固有的。当与微步进驱动器结合使用时,5 相电机的步距可小至 0.00288°,但位置精度和重复精度仍受限于电机的机械精度。2 相和 5 相电机的机械精度均为 ± 3 弧分 (0.05°)。
振动
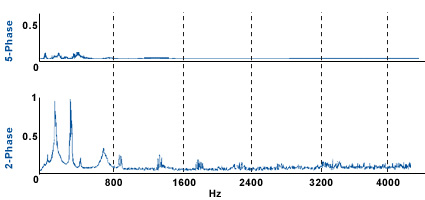
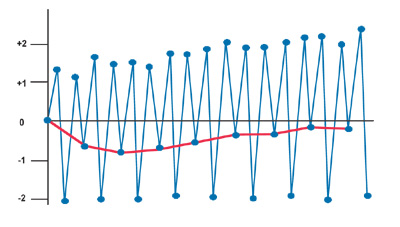
由于 5 相步进电机的步距角更小,0.72° 与 2 相电机的 1.8° 相比,5 相电机的振动远小于 2 相电机。右图显示了 5 相电机产生的振动与 2 相步进电机产生的振动。如您所见,两相电机会产生更大的振动。
*右侧的图表表示每转 5K 步的微步进。这些图表是通过将发电机连接到双轴电机创建的。当电机振动时,生成的电压被绘制成图表。电机振动越大,产生的电压就越大。
力矩
虽然 2 相步进电机和 5 相步进电机的输出扭矩之间几乎没有差异,但 5 相电机确实具有更多“可用”扭矩。这主要是由于两个电机产生的扭矩波动量。
半步或微步 5 相步进电机实际上增加了高达 10% 的扭矩,因为更多的相被通电。当半步进和微步进时,两相电机会损失高达 40% 的扭矩,但是,许多两相驱动器通过过驱动相反的扭矩矢量来补偿。
当定子通电时,它会产生一个吸引转子磁通量的电磁铁。磁通量可以分解为两个矢量,一个是法向矢量,一个是切向矢量。仅当存在切向分量时才会产生扭矩。下图描述了切向通量的存在。
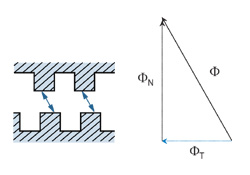
在 图 1中,转子齿与定子齿直接对齐,磁通只有法向分量,因此不产生扭矩。当转子齿从图 2、3 和 4中的定子齿移位时, 电机会产生扭矩。我们将此扭矩称为负扭矩,因为扭矩试图将牙齿拉回到稳定位置。在 图 5中,磁通在定子齿之间均匀分配,没有产生扭矩。通过 图 6、7 和 8, 当移位的转子齿移动以与下一个定子齿对齐时,会产生正扭矩。最后,转子齿与下一个定子齿直接对齐(图 1)。
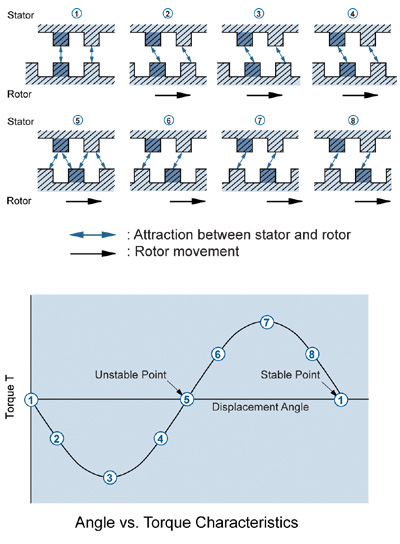
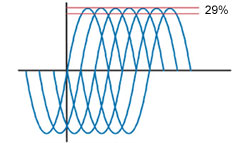
电机的每一相都为电机的总输出扭矩贡献正弦形扭矩位移曲线(如下图所示)。峰值和谷值之间的差异称为扭矩波动。转矩脉动会引起振动,因此差异越大,振动越大。
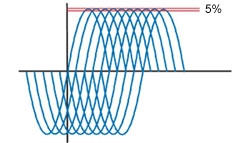
随着更多相位对电机总扭矩的贡献,5 相电机的扭矩纹波比 2 相电机大大降低。2 相电机的峰值和谷值之间的差异可高达 29%,而 5 相电机仅为 5% 左右。由于转矩脉动直接导致振动,因此 5 相电机比 2 相电机运行更平稳。
两相扭矩位移
五相力矩排量
准确性/可重复性
精度有两个组成部分,电气和机械。电气错误是由相位不平衡引起的。例如,电机的绕组电阻规格为±10%,可能电机额定功率为10W,但一相可能为9.2W,另一相可能为10.6W。相之间的这种差异会导致转子比另一相更朝向一相对齐。
机械误差有几个组成部分,主要的一个是齿形。虽然电机上的齿应该是方形的,但冲压工艺和模具的使用年限可能会导致某些齿或齿的一部分变圆。当齿变圆时,磁通量不是直接流动,而是可以流动到别处。因此,这些因素会影响电机的精度。
使用全步驱动器,两相电机每 4 步重复一次状态,而在 5 相电机中,状态每 10 步重复一次。由相位不平衡引起的任何电气错误在 2 相中每 4 步和 5 相中每 10 步被否定,只留下机械错误。
一旦电机完成完整的 360° 旋转,同一个齿现在在原始起点处对齐,消除了机械误差。由于 2 相电机每转 200 步,每 200 步几乎完美,而 5 相电机每转 500 步,每 500 步几乎完美。
同步性
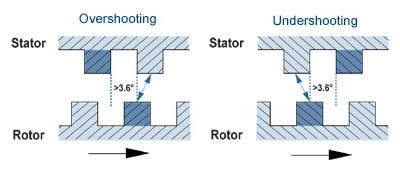
由于 5 相步进电机每步仅移动 0.72°,因此 5 相电机几乎不可能因过冲/下冲而错过一步。当转子上的齿与定子上的正确齿不对齐时,电机将失去同步或错过一步。什么会导致牙齿排列不齐?首先,为了使转子齿不能正确对齐,另一个齿必须对齐到它应该对齐的位置。为了实现这一点,转子必须有超过 3.6° 的上冲(超过正确的定子齿)或下冲(没有移动足够远以与正确的定子齿对齐)。为什么是 3.6°?好吧,因为转子齿被磁力吸引,正确的齿需要超过定子齿之间的一半才能对齐(转子齿之间的 7.2° 除以 2 得到 3.6°)。因此,当转子超出正确的定子齿超过 3.6° 时,下一个齿将在其位置对齐,从而导致您跳过一个步骤。相反,如果转子未能移动超过 3.6°,则当前转子齿将与定子齿保持对齐并且转子不会旋转,这意味着您错过了一步。
驱动方式
2 相和 5 相步进电机都有多种驱动方法。以下是整步和微步驱动器概念的快速概述。
两相全步系统(1.8°/步)
2-Phase Full Step 系统同时为 A 相和 B 相通电,并在正负之间切换以产生旋转。

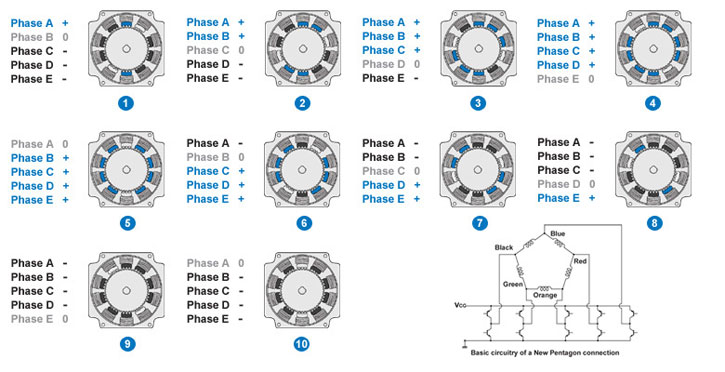
5 相全步系统(五边形 4 相励磁)(0.72°/步)
4相励磁系统是5相电机独有的,运行更稳定。
微步进
微步驱动器通过将电流减小到一个相位,同时将电流递增到下一相位来划分电机的基本步距角。这导致电机采取更小的步骤。使用微步驱动器,电机的基本步可以分为 1/1 到 1/250 范围内的更小步。
右边的插图代表了微步进的基本概念。
图 1 - A 相电流为 100%,因此转子直接对齐。
图 2 - A 相的电流减少到 75%,而 B 相现在有 25% 的电流。
图 3 - A 相和 B 相的电流均为 50%,因此转子直接排列在两者的中间。
图 4 - A 相现在为 25%,B 相为 75%,因此转子移近 B 相。
图 5 - A 相关闭,B 相处于 100%,因此转子最终直接与 B 相对齐。

通过在此示例中对电机进行微步进,我们将 5 相步进电机每转基本 500 步除以 5,将其增加到每转 2,500 步。电机的分辨率现在为 0.144°。
与其他驱动器相比,微步进不仅提供了更高的分辨率,还确保了更平稳的运行、更低的振动和更低的噪音。
结论
根据您的特定应用,两相电机可能就足够了。然而,与 2 相步进电机相比,5 相步进电机提供更高的分辨率、更低的振动、更高的加速和减速速率(由于步距角更小),并且不太可能因过冲/下冲而失去同步。对于要求高精度、低噪音和低振动的应用,5 相是更好的技术。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。