一、 步进电机分类
1.1、 反应式步进电机(VR):转子由软磁材料制成,结构简单、成本低、动态力学性能差、步距角可以很小;
1.2、 永磁式步进电机(PM):转子由永磁材料制成,转子级数少,步距角大,力矩大,动态性能好;
1.3、 混合式步进电机(HB):结合VR、PM电机优点,输出力矩大、步距角小、动态性能好,目前使用最为广泛,下述以该类电机为例进行介绍。
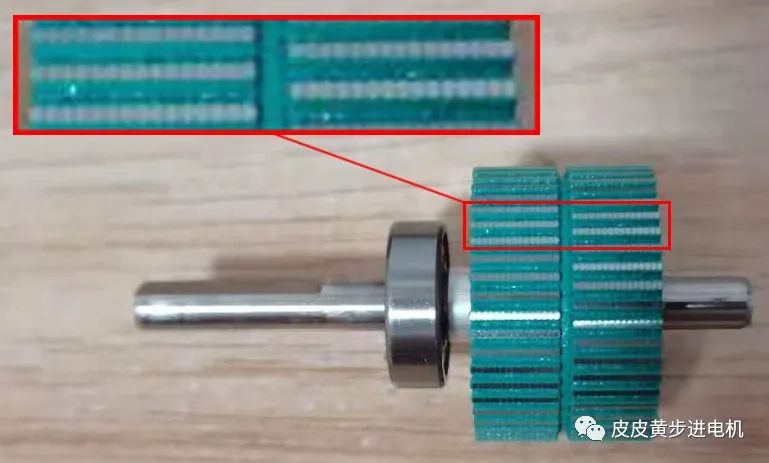
二、 两相混合式步进电机结构
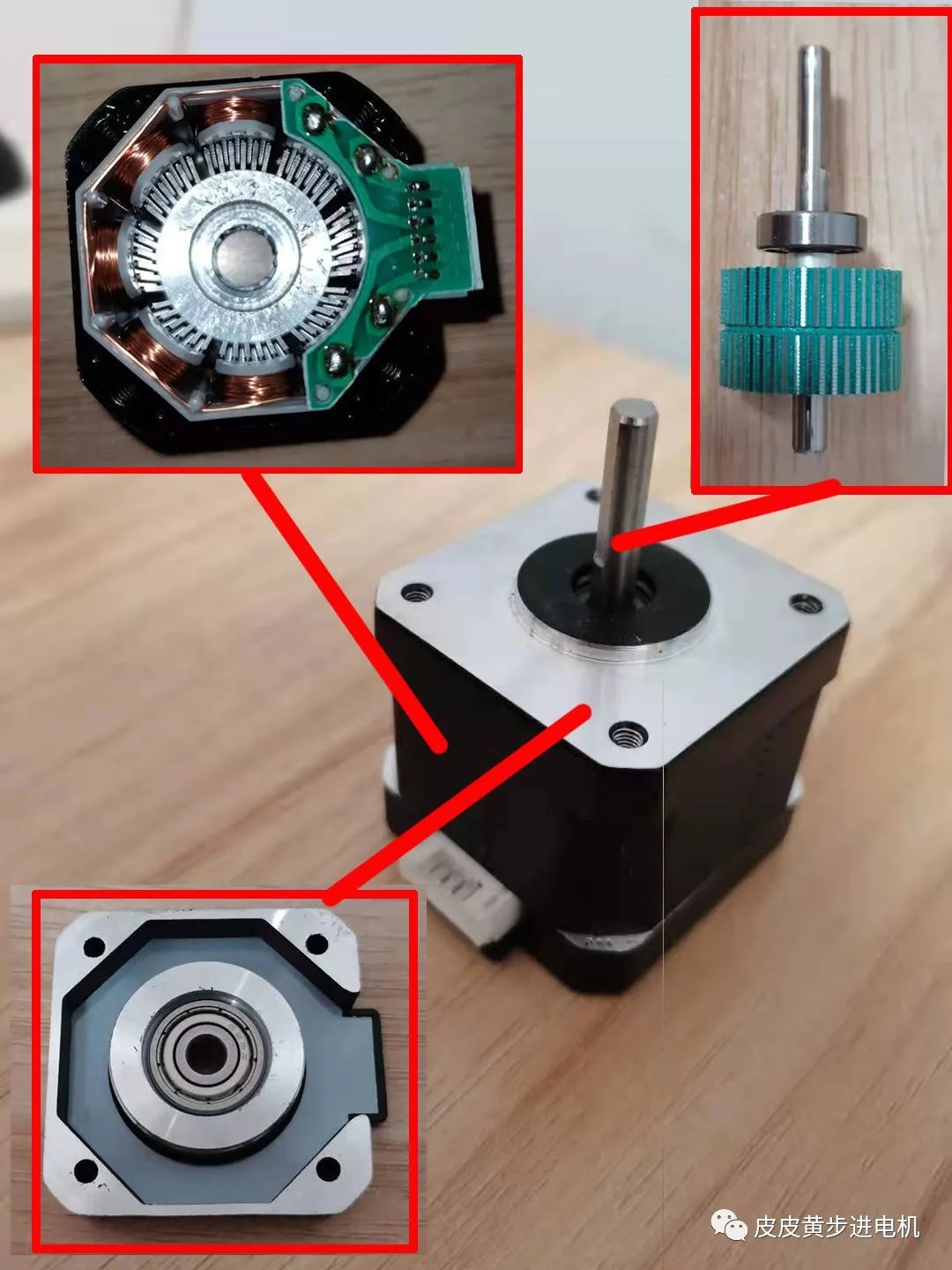
2.1、 实物图如下所示,主要由定子、转子、端盖组成
2.2、结构示意图如下所示
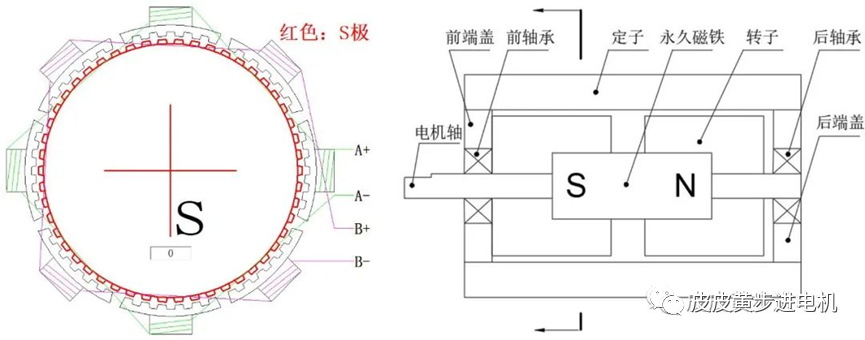
2.3、剖视图分析(剖切转子S端)
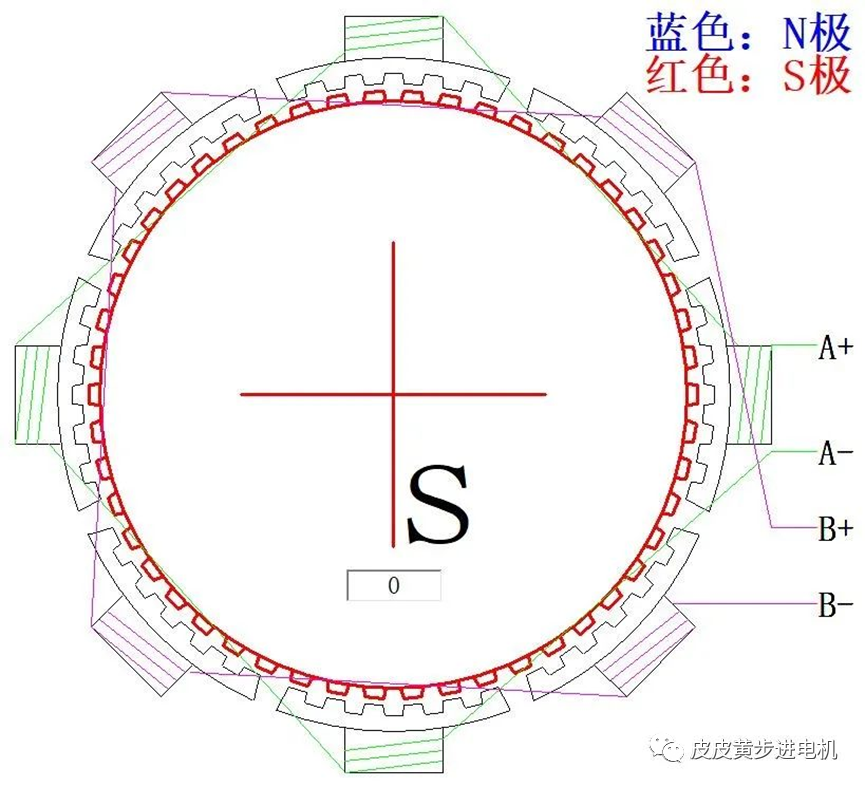
定子有8个磁极,如下图所示,绿色绕线的为A相,洋红色绕线的为B相。转子有50个齿,均匀分布。定子每个磁极有6个齿,总计8*6=48齿。当A相定子有一对磁极齿与转子齿完全对齐时,A相定子另一对磁极齿必定与转子齿完全错开,此时B相定子齿与转子齿呈半齿对齐(或者半齿错开)。同理可以判断B相定子齿与转子齿对齐时的状态。
2.4、转动原理
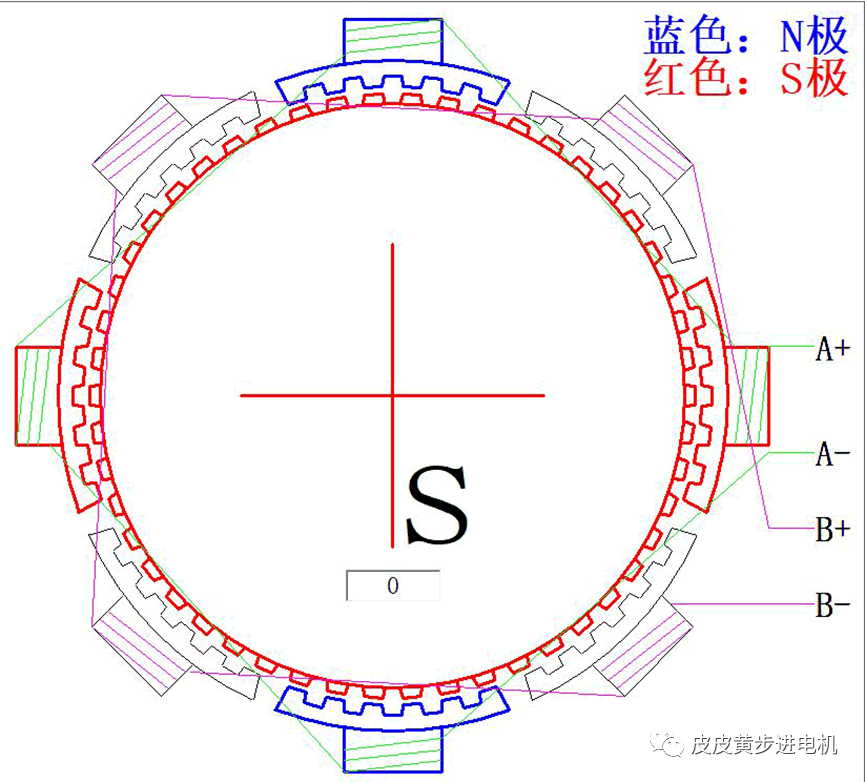
①当A+接电源正极,A-接电源负极时,A相线圈导通,产生磁场,如图下图所示,A相蓝色的N极与转子的S极相互吸引对齐,同时A相的S极与转子S极相互排斥而错开,此时达到稳定状态

②当B+接电源正极,B-接电源负极时,B相导通,此时状态如下
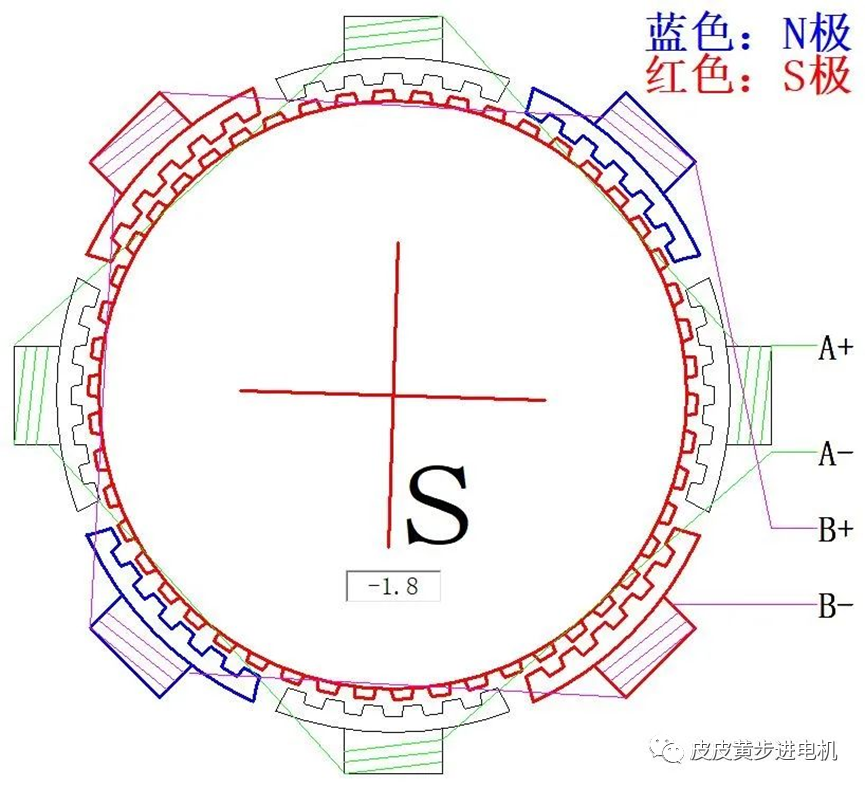
③当A-接电源正极,A+接电源负极时,A相导通,此时状态如下
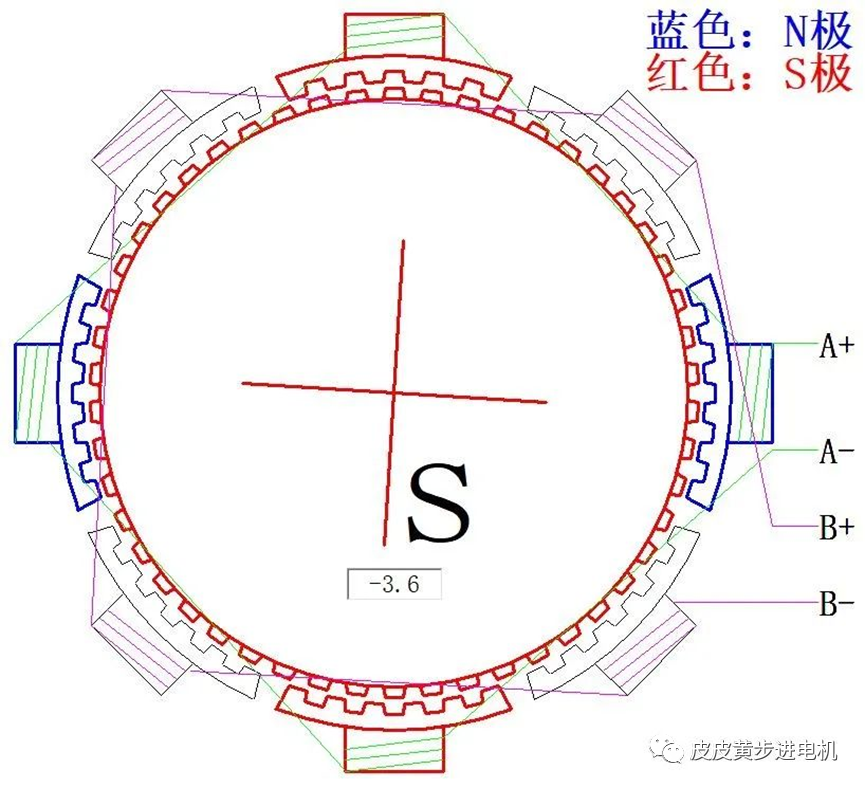
④当B-接电源正极,B+接电源负极时,B相导通,此时状态如下
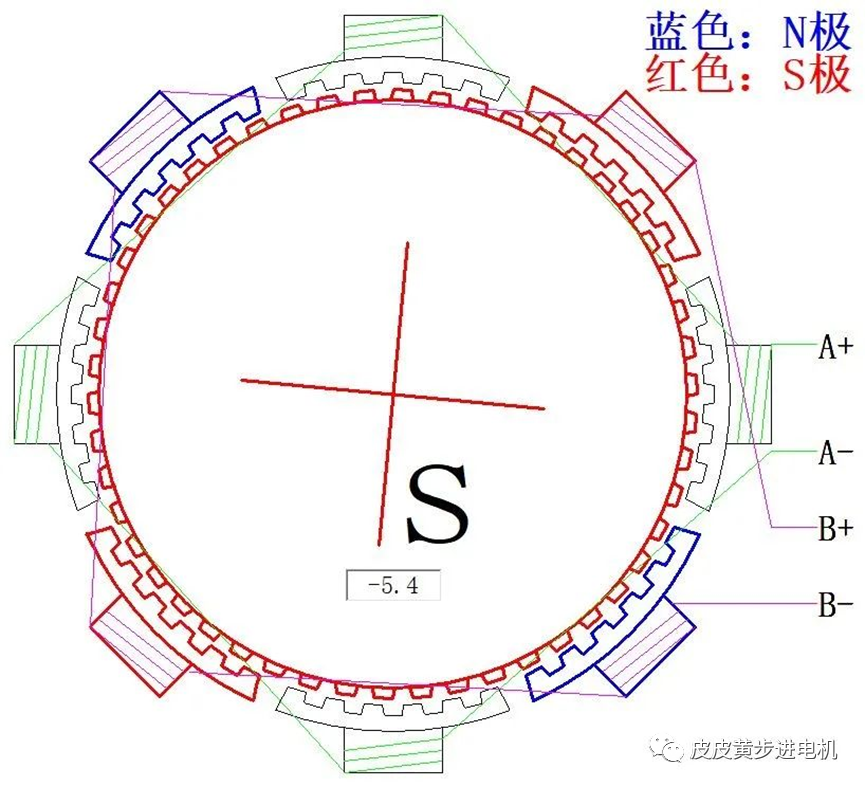
⑤然后回到①图状态,经过4个步骤,转子转过一个齿,转子每一个齿对应的角度是360/50=7.2°,所以每一个步骤,电机转过的角度就是7.2°/4=1.8°,即步进电机的步距角
2.5、完整画如下
2.6、转子N极布局
上述解释的是转子S受力,转子N极齿与S极齿是完全错开的,如下图所示,受力分析与S极是一样的。
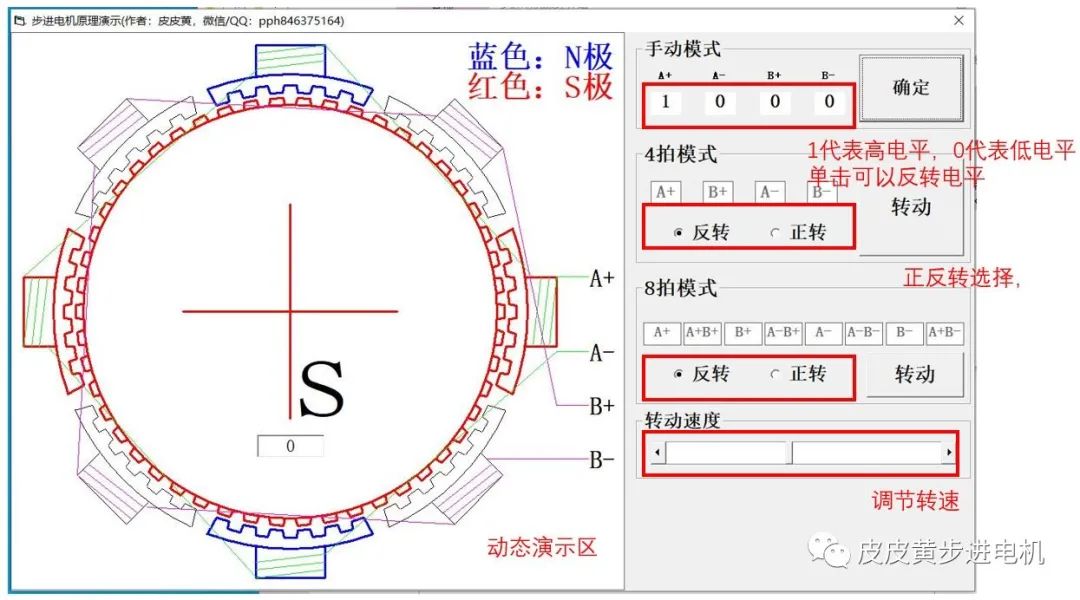
三、步进电机演示器功能介绍
为了方便直观的理解电机转动原理,制作了电机演示器,可以手动操作,也可以自动操作,具有4拍和8拍模式,速度也可自行调节