






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服1. 输入捕获简介
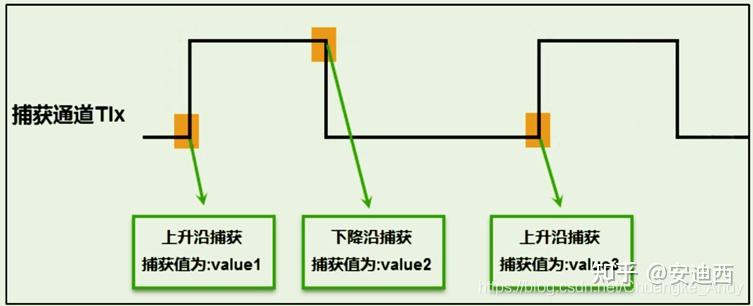
输入捕获模式可以用来测量脉冲宽度或者测量频率,下图以测量脉宽为例来说明输入捕获的原理

假定定时器工作在向上计数模式,图中t1-t2的时间就是我们需要测量的低电平时间。测量方法为:首先设置定时器通道x为下降沿捕获,在t1时刻就会捕获到当前的CNT值,然后立即清零CNT,并设置通道x为上升沿捕获,到t2时刻又会发送捕获事件,得到此时的CNT值(记为CCRx2)。在t1-t2之间可能产生N次定时器溢出,因此需要对定时器溢出做处理,防止低电平太长导致数据不准确。 t1-t2之间计数的次数为:N * ARR + CCRx2,再乘以CNT计数周期即可得到低电平持续时间
2. 硬件设计
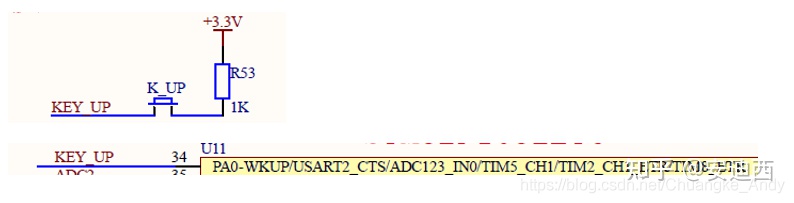
本实验通过TIM5的通道1输入捕获功能捕获KEY_UP按键的高电平持续时间,并通过printf函数打印捕获到的高电平时间,用D1指示灯提示系统正常运行
D1指示灯
K_UP按键
USART1串口
TIM5
3. 软件设计
3.1 STM32CubeMX设置
RCC设置外接HSE,时钟设置为72M
PC0设置为GPIO推挽输出模式、上拉、高速、默认输出电平为高电平
USART1选择为异步通讯方式,波特率设置为115200Bits/s,传输数据长度为8Bit,无奇偶校验,1位停止位
选择TIM5,设置定时器时钟源为内部时钟源、设置通道1为输入捕获模式(PA0自动被选中),NVIC设置中激活定时器中断,在GPIO设置里将PA0下拉保证没有信号输入的时候电平稳定

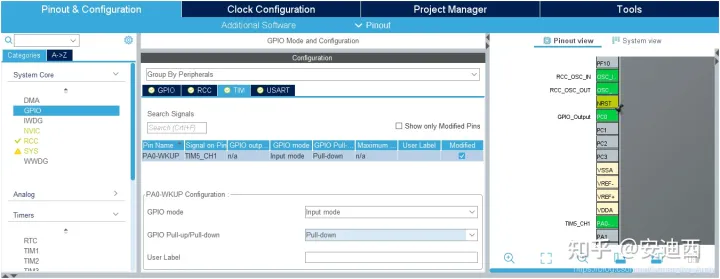
预分频系数设置为72-1,向上计数,自动重装载值设为0xFFFF,则计时器时钟频率为1MHz,计时器周期为1us,定时器溢出周期为 65535 * 1 = 65535us

输入工程名,选择工程路径(不要有中文),选择MDK-ARM V5;勾选Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;点击GENERATE CODE,生成工程代码
3.2 MDK-ARM编程
在tim.c文件中编写定时器更新中断处理回调函数
/* TIM5CH1_CAP_STA 各数据位说明
** bit7 捕获完成标志
** bit6 捕获到高电平标志
** bit5~0 捕获高电平后定时器溢出的次数*/
uint8_t TIM5CH1_CAP_STA = 0;
uint16_t TIM5CH1_CAP_VAL;
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){
if((TIM5CH1_CAP_STA & 0X80) == 0){ //还未成功捕获
if(TIM5CH1_CAP_STA & 0X40){ //已经捕获到高电平
if((TIM5CH1_CAP_STA & 0X3F) == 0X3F){ //高电平时间太长了
TIM5CH1_CAP_STA |= 0X80; //标记为完成一次捕获
TIM5CH1_CAP_VAL = 0XFFFF; //计数器值
}
else
TIM5CH1_CAP_STA++; //溢出次数加1
}
}
}
在tim.c文件中编写输入捕获中断处理回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim){
if((TIM5CH1_CAP_STA & 0X80) == 0){ //还未成功捕获
if(TIM5CH1_CAP_STA & 0X40){ //捕获到上升沿后条件为真
TIM5CH1_CAP_STA |= 0X80; //标记为完成一次高电平捕获
TIM5CH1_CAP_VAL = HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_1); //获取当前的计数器值
TIM_RESET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1); //清除原来的设置
TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1,TIM_ICPOLARITY_RISING); //设置上升沿捕获
}
else{
TIM5CH1_CAP_STA = 0;
TIM5CH1_CAP_VAL = 0;
TIM5CH1_CAP_STA |= 0X40; //标记捕获到上升沿
__HAL_TIM_DISABLE(&htim5); //关闭定时器
__HAL_TIM_SET_COUNTER(&htim5,0); //计数器值清零
TIM_RESET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1); //清除原来的设置
TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING); //设置下降沿捕获
__HAL_TIM_ENABLE(&htim5); //使能定时器
}
}
}
此处的TIM_RESET_CAPTUREPOLARITY() 函数有一处HAL库函数错误,会导致编译该函数报错,解决办法是找到该函数在 stm32f1xx_hal_tim.h 文件中的定义,删除多余的一个反括号 ‘)’
stm32f1xx_hal_tim.h
//修改前
#define TIM_RESET_CAPTUREPOLARITY(__HANDLE__, __CHANNEL__)
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC1P | TIM_CCER_CC1NP))) :
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC2P | TIM_CCER_CC2NP)) :
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC3P)) :
((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC4P)))
//修改后
#define TIM_RESET_CAPTUREPOLARITY(__HANDLE__, __CHANNEL__)
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC1P | TIM_CCER_CC1NP)) :
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC2P | TIM_CCER_CC2NP)) :
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC3P)) :
((__HANDLE__)->Instance->CCER &= ~(TIM_CCER_CC4P)))
在main.c文件中编写高电平持续时间处理代码
int main(void){
long long temp = 0;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM5_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_1); //一定要开启TIM5通道1的捕获中断
__HAL_TIM_ENABLE_IT(&htim5,TIM_IT_UPDATE); //一定要开启TIM5的更新中断
printf("This is TIM_CAP test...n");
/* USER CODE END 2 */
while (1){
HAL_Delay(500);
if(TIM5CH1_CAP_STA & 0X80){ //完成一次高电平捕获
temp = TIM5CH1_CAP_STA & 0X3F;
temp *= 65536; //溢出总时间
temp += TIM5CH1_CAP_VAL; //总的高电平时间
printf("High level duration:%lld usrn",temp);
TIM5CH1_CAP_STA = 0; //准备下一次捕获
}
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_0);
}
}
4. 下载验证
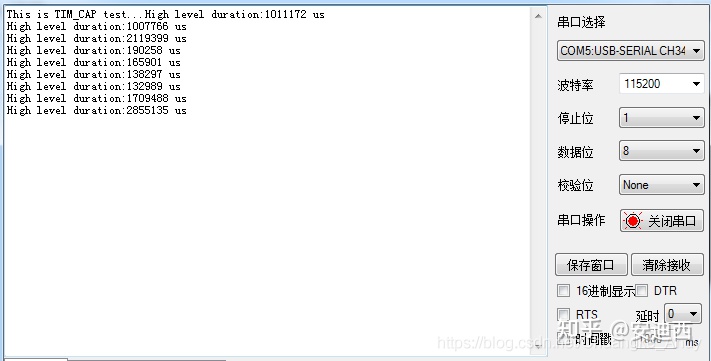
编译无误后下载到开发板,可以看到D1指示灯每500ms闪烁一次,按下KEY_UP后,串口会打印出相应的高电平持续时间
相关文章









