伺服驱动器使用方法大体和变频器一样,在这里需要注意的是伺服驱动器的选型不只有功率一个参数,还有低惯量和高惯量。 低惯量类型一般转矩低,转速高,适合一些负载轻,运动频繁的控制。高惯量类型转矩高,转速低,适合一些负载较大的控制。所以需要根据现场情况选择合适的驱动器,否则要不就是转速跟不上,要不就是电机过热影响寿命。
这里我们以松下A5系列伺服驱动器配合西门子S7-200smart为例说明。
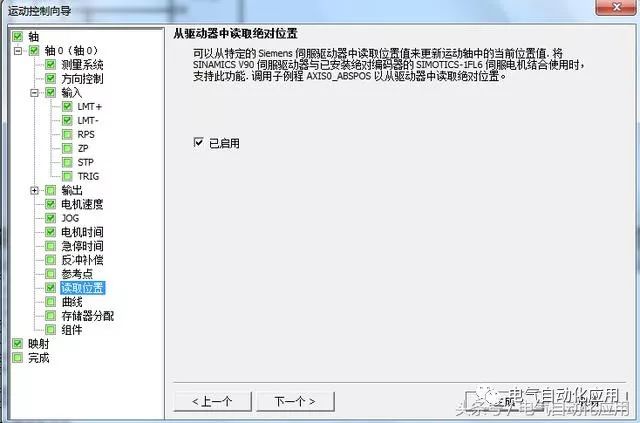
第一步,先接线,A5系列伺服驱动器需要接线的端子共有XA(供电电源的控制电源)、XB(电机输出线)、X4(控制线)和X6(电机编码器线)。我们看下接线图。(如果需要使用绝对位置控制,即是使用绝对编码器的话还需要通讯,绝对位置控制本身照比相对位置控制更加准确,且不受外界因素影响,缺点是绝对位置编码器不好维护,出现问题后需要手动复位,复位过程较麻烦,而且松下的驱动器为了保证绝对编码器的精度和安全,通讯使用的是很复杂的多次校验,对于新手很不友好,需要先学习中断,本篇文章不做拓展)

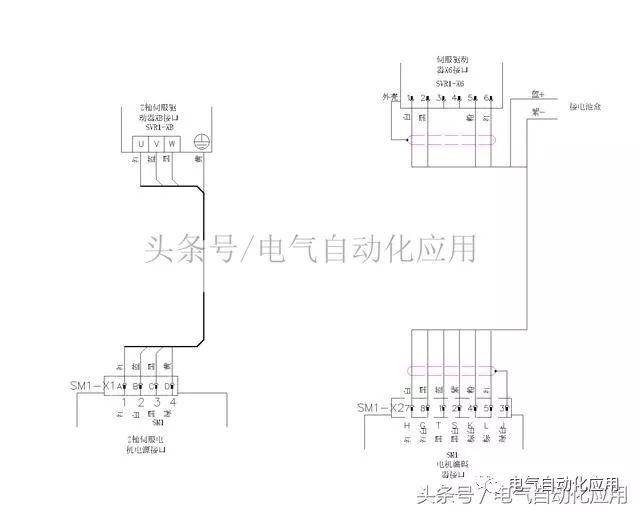

控制端子上有很多保护端子,需要将这些端子都短接才能正常使用

绝对编码器通讯数据图 接完线后我们需要在驱动器上设置控制模式,参数等等。 其中,伺服系统的控制模式分为 一:位置控制模式 二:速度控制模式 三:转矩控制模式 四:全闭环控制模式 根据需要驱动的设备选择模式,每个模式的参数设置方法都不相同,但只要熟悉一个其他的调试起来也很快。
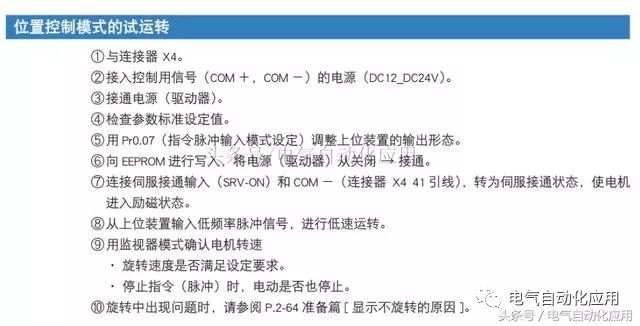
这只是试运行参数,并不是所有参数,参数设置请参考驱动器手册 设置完参数后我们看下程序,以前我们说过,西门子s7-200smart系列对运动控制支持得很好,不仅最大脉冲数足够,而且运动控制非常方便,不需要拓展库文件。
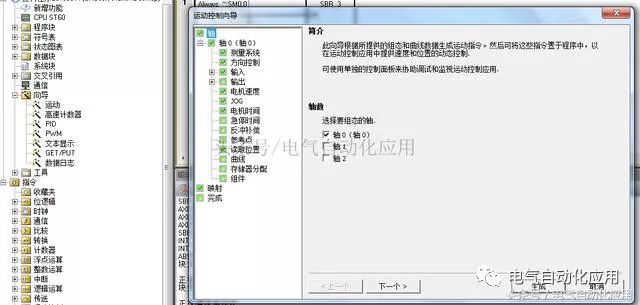
打开S7-200smart软件后添加运动向导(轴的区别只在于输出的Q点不同)
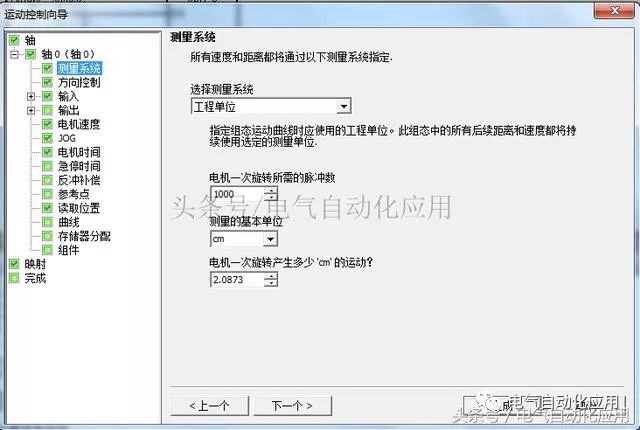
按照电机参数和机械尺寸填写实际数据,以便与真实位置对应。
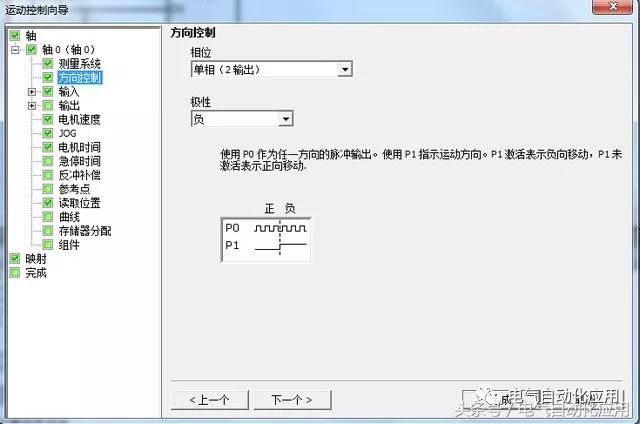
选择一种模式,这种方式便于直观输出。
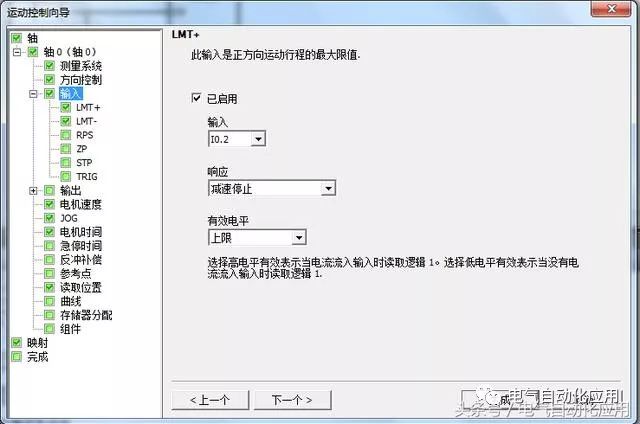
前后急停限位,安全措施。

手动速度和最大速度,根据电机数据填写。
清零功能
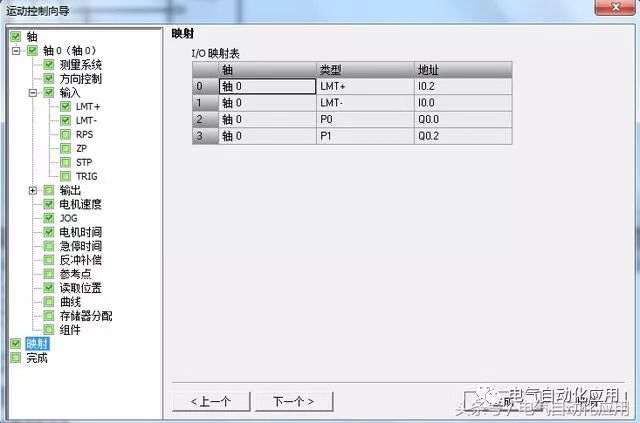
控制端子,按照接线图接线即可

程序注释;第一行为驱动器使能行,没有的话驱动器无法动作,可以用来做紧急制动。 第二行为编码器清零,此文中的编码器为相对式。第三行为控制输出行,其中START端子应该由上升沿控制,文章中的是一个往复运动的例子。除了以上三个程序指令,运动控制还有其他功能,等着您来探索。









