☆ CAN协议基础知识
I2C.SPI总线多用于短距离传输,协议简单,数据量少,主要用于IC之间的通讯,而 CAN 总线则不同,CAN(Controller Area Network) 总线定义了更为优秀的物理层、数据链路层,并且拥有种类丰富、简繁不一的上层协议。与I2C、SPI有时钟信号的同步通讯方式不同,CAN通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有CAN_High和CAN_Low两条信号线,共同构成一组差分信号线,以差分信号的形式进行通讯。
CAN物理层的形式主要分为闭环总线及开环总线网络两种,一个适合于高速通讯,一个适合于远距离通讯。CAN闭环通讯网络是一种遵循ISO11898标准的高速、短距离网络,它的总线最大长度为40m,通信速度最高为1Mbps,总线的两端各要求有一个
“120欧”的电阻来做阻抗匹配,以减少回波反射。
☆ 闭环总线网络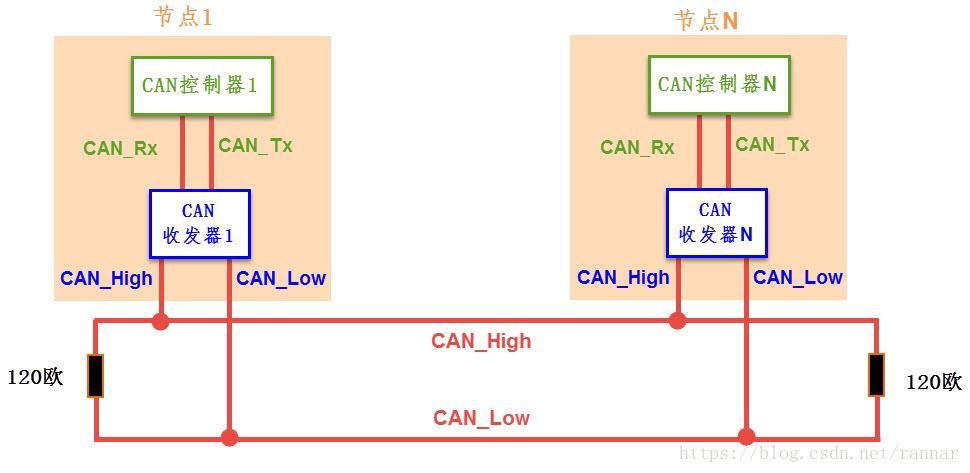
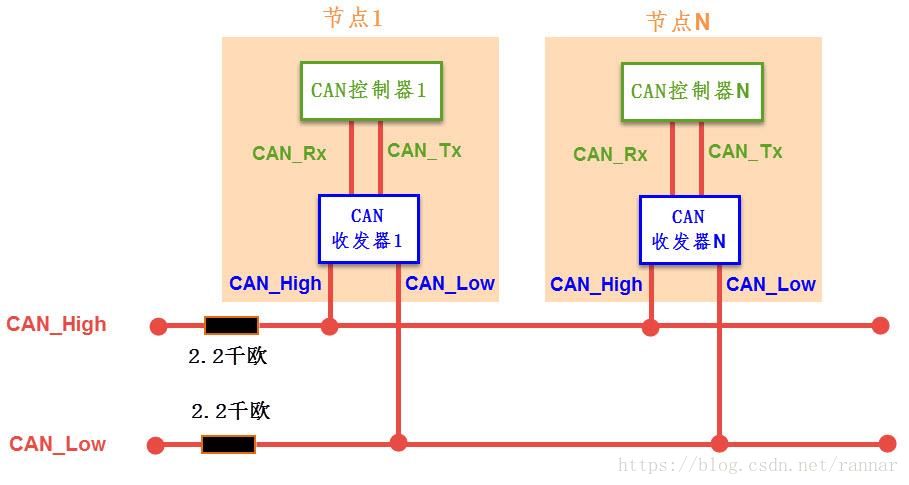
CAN开环总线网络是遵循ISO11519-2标准的低速、远距离网络,它的最大传输距离为1km,最高通讯速率为125kbps,两根总线是独立的、不形成闭环,要求每根总线上各串联有一个“2.2千欧”的电阻。
☆ 开环总线网络
CAN总线上可以挂载多个通讯节点,节点之间的信号经过总线传输,实现节点间通讯。由于CAN通讯协议不对节点进行地址编码,而是对数据内容进行编码,所以网络中的节点个数理论上不受限制,只要总线的负载足够即可,可以通过中继器增强负载。
CAN通讯节点由一个CAN控制器及CAN收发器组成,控制器与收发器之间通过CAN_Tx及CAN_Rx信号线相连,收发器与CAN总线之间使用CAN_High及CAN_Low信号线相连。其中CAN_Tx及CAN_Rx使用普通的类似TTL逻辑信号,而CAN_High及CAN_Low是一对差分信号线,使用比较特别的差分信号。当CAN节点需要发送数据时,控制器把要发送的二进制编码通过CAN_Tx线发送到收发器,然后由收发器把这个普通的逻辑电平信号转化成差分信号,通过差分线CAN_High和CAN_Low线输出到CAN总线网络。而通过收发器接收总线上的数据到控制器时,则是相反的过程,收发器把总线上收到的CAN_High及CAN_Low信号转化成普通的逻辑电平信号,通过CAN_Rx输出到控制器中。
☆ 差分信号
差分信号又称差模信号,与传统使用单根信号线电压表示逻辑的方式有区别,使用差分信号传输时,需要两根信号线,这两个信号线的振幅相等,相位相反,通过两根信号线的电压差值来表示逻辑0和逻辑1。
相对于单信号线传输的方式,使用差分信号传输具有如下优点:
抗干扰能力强,当外界存在噪声干扰时,几乎会同时耦合到两条信号线上,而接收端只关心两个信号的差值,所以外界的共模噪声可以被完全抵消。
能有效抑制它对外部的电磁干扰,同样的道理,由于两根信号的极性相反,他们对外辐射的电磁场可以相互抵消,耦合的越紧密,泄放到外界的电磁能量越少。
时序定位精确,由于差分信号的开关变化是位于两个信号的交点,而不像普通单端信号依靠高低两个阈值电压判断,因而受工艺,温度的影响小,能降低时序上的误差,同时也更适合于低幅度信号的电路。
由于差分信号线具有这些优点,所以在USB协议、485协议、以太网协议及CAN协议的物理层中,都使用了差分信号传输。
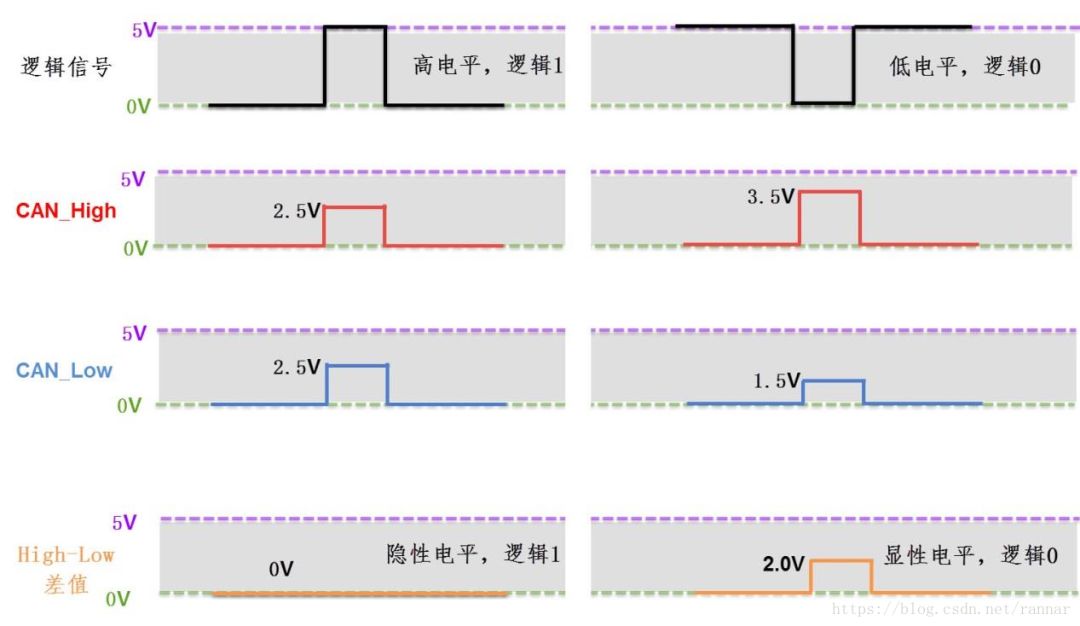
☆ CAN协议中的差分信号
CAN协议中对它使用的CAN_High及CAN_Low表示的差分信号做了规定。以高速CAN协议为例,当表示逻辑1时(隐性电平),CAN_High和CAN_Low线上的电压均为2.5v,即它们的电压差V H -V L =0V;而表示逻辑0时(显性电平),CAN_High的电平为3.5V,CAN_Low线的电平为1.5V,即它们的电压差为V H -V L =2V。
☆ CAN 总线的特点
CAN 总线网络是一种真正的多主机网络,在总线处于空闲状态时,任何一个节点单元都可以申请成为主机,向总线发送消息。其原则是:最先访问总线的节点单元可以获得总线的控制权;多个节点单元同时尝试获取总线的控制权时,将发生仲裁事件,具有高优先级的节点单元将获得总线控制权。
CAN 协议中,所有的消息都以固定的数据格式打包发送。两个以上的节点单元同时发送信息时,根据节点标识符(常称为 ID,亦打包在固定的数据格式中)决定各自优先级关系,所以 ID 并非表示数据发送的目的地址,而是代表着各个节点访问总线的优先级。如此看来,CAN 总线并无类似其他总线“地址”的概念,在总线上增加节点单元时,连接在总线的其他节点单元的软硬件都不需要改变。
CAN 总线的通信速率和总线长度有关,在总线长度小于 40m 的场合中,数据传输速率可以达到 1Mbps,而即便总线长度上升至 1000m,数据的传输速率仍可达到 50Kbps,无论在速率还是传输距离都明显优于常见的 RS232、RS485 和 I2C 总线。
对于总线错误,CAN 总线有错误检测功能、错误通知功能、错误恢复功能三种应对措施,分别应对于下面三点表述:所有的单元节点都可以自动检测总线上的错误;检测出错误的节点单元会立刻将错误通知给其他节点单元;若正在发送消息的单元检测到当前总线发生错误,则立刻强制取消当前发送,并不断反复发送此消息至成功为止。
CAN 总线上的每个节点都可以通过判断得出,当前总线上的错误是暂时的错误(如瞬间的强干扰)还是持续的错误(如总线断裂)。当总线上发生持续错误时,引起故障的节点单元会自动脱离总线。
CAN 总线上的节点数量在理论上没有上限,但在实际上受到总线上的时间延时及电气负载的限制。降低最大通信速率,可以增加节点单元的连接数;反之,减少节点单元的连接数,则最大通信速率可以提高。
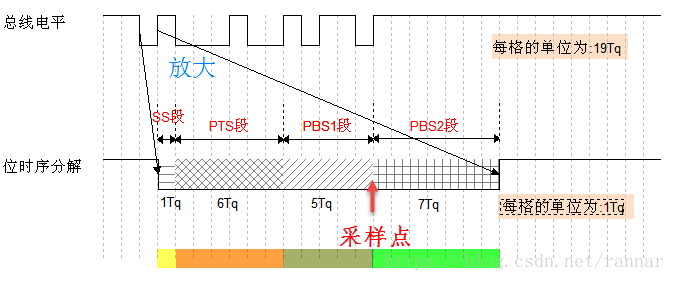
CAN总线的数据通信是以数据帧的格式进行的,而数据帧又是由位场组成的,其中每一个位又被划分为四段.即SS(SYNC SEG),PTS(PROP SEG--传播时间段),PBS1(PHASE SEG1--相位缓冲段1),PBS2(PHASE SEG1--相位缓冲段2).
数据帧的结构图:
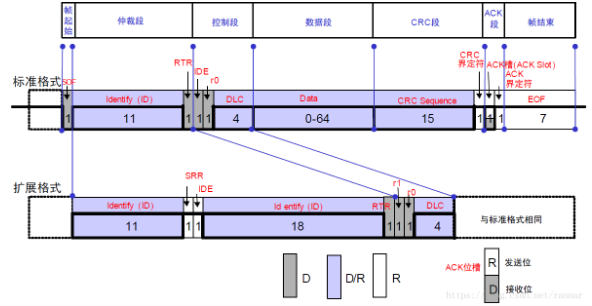 图中D表示显性电平,R表示隐形电平.ID:高位在前,低位在后。基本ID,禁止高7位都为隐性,即不能:ID=1111111XXXX。RTR,远程请求位。0,数据帧;1, 远程帧;SRR,替代远程请求位。设置为1(隐性电平);IDE,标识符选择位。0,标准标识符;1,扩展标识符;r0,r1:保留位。必须以显现电平发送,但是接收可以是隐性电平。DLC:数据长度码。0~8,表示发送/接收的数据长度(字节)。IDE,标识符选择位。0,标准标识符;1,扩展标识符; ☆ 位时序分解
图中D表示显性电平,R表示隐形电平.ID:高位在前,低位在后。基本ID,禁止高7位都为隐性,即不能:ID=1111111XXXX。RTR,远程请求位。0,数据帧;1, 远程帧;SRR,替代远程请求位。设置为1(隐性电平);IDE,标识符选择位。0,标准标识符;1,扩展标识符;r0,r1:保留位。必须以显现电平发送,但是接收可以是隐性电平。DLC:数据长度码。0~8,表示发送/接收的数据长度(字节)。IDE,标识符选择位。0,标准标识符;1,扩展标识符; ☆ 位时序分解
为了实现位同步,CAN协议把每一个数据位的时序分解成SS段、PTS段、PBS1段、PBS2段,这四段的长度加起来即为一个CAN数据位的长度。分解后最小的时间单位是Tq,而一个完整的位由8~25个Tq组成。
☆ STM32中的CAN接口
STM32的芯片中具有bxCAN控制器 (Basic Extended CAN),它支持CAN协议2.0A和2.0B标准。该CAN控制器支持最高的通讯速率为1Mb/s;可以自动地接收和发送CAN报文,支持使用标准ID和扩展ID的报文;外设中具有3个发送邮箱,发送报文的优先级可以使用软件控制,还可以记录发送的时间;具有2个3级深度的接收FIFO,可使用过滤功能只接收或不接收某些ID号的报文;可配置成自动重发;不支持使用DMA进行数据收发。
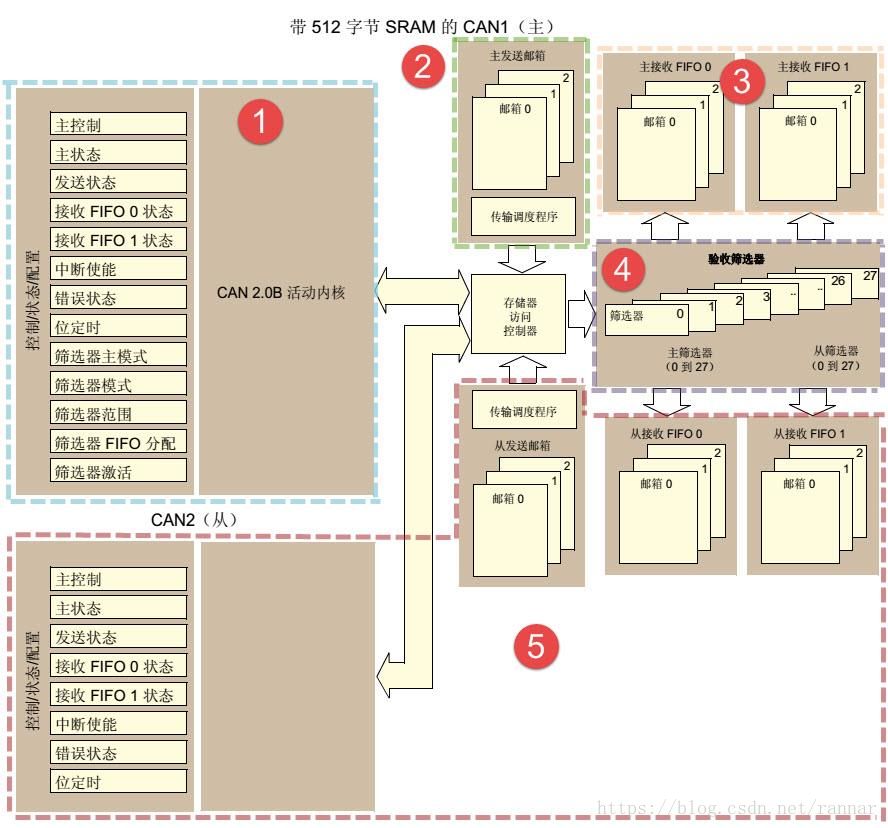
1. CAN控制内核2. CAN发送邮箱3. CAN接收FIFO
4. 验收筛选器
STM32有两组CAN控制器,其中CAN1是主设备,框图中的“存储访问控制器”是由CAN1控制的,CAN2无法直接访问存储区域,所以使用CAN2的时候必须使能CAN1外设的时钟。
STM32至少配备一个bxCAN(basic extend can )控制器,支持2.0A和2.0B协议,最高数据传输速率可达1M bps,支持11位标准帧格式和29位扩展帧格式的接收和发送,具备三个发送邮箱和两个接收FIFO,此wa此外还有三级可编程滤波器,STM32的bxCAN非常适应CAN总线网络y网络应用发展需求,其主要主要特征如下 :
支持CAN协议2.0A和2.0B主动模式
波特率最高可达1Mbps
支持时间触发通讯功能
数据发送特性:具备三个发送邮箱;发送报文的优先级可以通过软件配置,可记录发送时间的时间戳。
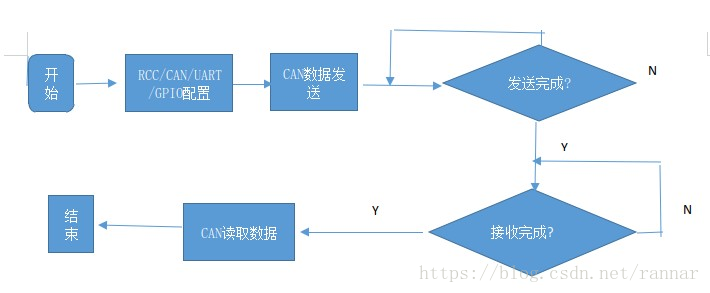
数据接收特性:具备三级深度和两个接收FIFO;具备可变的过滤器组,具备可编程标识符列表,可配置FIFO溢出处理方式,记录接收时间的时间戳报文管理:中断可屏蔽;邮箱单独占有一块地址空间,便于提高软件效率。本文的实验设计将利用STM32 的bxCAN控制器的环回工作模式,实现bxCAN控制器的自收发过程,并使用串口设备跟踪监视数据收发情况。程序流程如下图
本程序设计主要围绕bxCAN控制器的初始化初始化配置展开,其要点罗列如下:
1. 初始化RCC寄存器,配置PLL输出72MHZ时钟,APB1总线频率为36MHZ,分别打开CAN,GPIO和USART1的设备时钟。
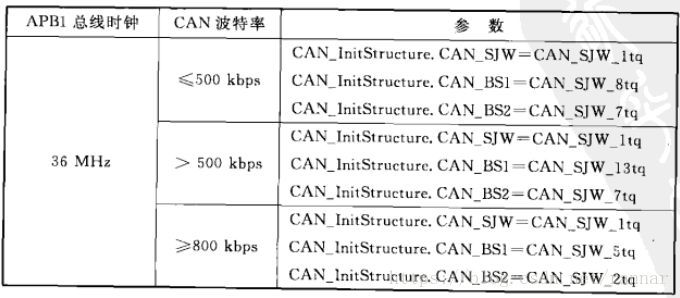
2. 设置CAN的Tx引脚(即PA12)为复用推挽模式,并设置Rx引脚(即PA1)为上拉输入模式,其中三个重要的参数如下配置:
CAN_InitStructure.CAN_SJW配置为CAN_SJW_1tq;CAN_InitStructure.CAN_BS1配置为CAN_BS1_8tq;CAN_InitStructure.CAN_BS2配置为CAN_BS2_7tq;
3. 最后分频数配置为5,配置接受接受缓冲区标识符为0x00AA0000,配置过滤器为32位屏蔽位模式,过滤器屏蔽标识符为0x00FF0000.
4. 初始化USART设备
5. 使用扩展帧shu帧数据格式,ID为0xAA,数据长度长度为8
STM32的CAN控制器设计的重点集中在CAN寄存器组的初始化过程中,而CAN初始化的重点在于波特率的设置,过滤器的设置和位时序的设置,以下作详细叙述。
(1)CAN波特率的计算
计算波特率是任何一种总线的zhon重要内容之一,CAN总线也不例外.从STM32微控制器的官方参考手册里可以查找到关于CAN波特率的计算公式如下.
通过配置位时序寄存器CAN_BTR的TS1[3:0]及TS2[2:0]寄存器位设定BS1及BS2段的长度后,就可以确定每个CAN数据位的时间:
BS1段时间:
T S1 =Tq x (TS1[3:0] + 1),
BS2段时间:
T S2 = Tq x (TS2[2:0] + 1),
一个数据位的时间:
T 1bit =1Tq+T S1 +T S2 =1+ (TS1[3:0] + 1)+ (TS2[2:0] + 1)= N Tq
其中单个时间片的长度Tq与CAN外设的所挂载的时钟总线及分频器配置有关,CAN1和CAN2外设都是挂载在APB1总线上的,而位时序寄存器CAN_BTR中的BRP[9:0]寄存器位可以设置CAN外设时钟的分频值 ,所以:
Tq = (BRP[9:0]+1) x T PCLK其中的PCLK指APB1时钟,默认值为36MHz。
最终可以计算出CAN通讯的波特率:
BaudRate = 1/N Tq程序设计要点中强调的三个重要参数,其实是can总线物理层中所要求的位时序。共三个阶段,分别为SJW,BS1和BS2阶段,这三个阶段的时间长度都是以长度为tq的时间单元为单位的。这样可以逐步计算出CAN总线的波特率。因此要点提示中所要求的参数,实际上将CAN的波特率设置为450kdps。
过滤器的设置
can总线没有所谓地址的概念。总线上的每个报文都可以被各个节点接收。这是一种典型的广播式网络。在实际应用中。某个节点往往只希望接收到特定类型的数据, 这就要借助过滤器来实现。顾名思义,过滤器的作用就是把节点不希望接收到的数据过滤掉。只将希望接收到的数据给予通行。
stm32的CAN控制器,提供14个过滤器。可以设置为屏蔽模式和列表模式对can总线上的报文进行过滤。当节点希望接收到一种报文时。可以用屏蔽位模式对can总线上的报文进行过滤。反之,当节点希望接受到单一类型报文时。则应该配置为列表模式。本机程序中使用了32位的屏蔽位模式。
下面仅对这种模式进行解析。can控制器的每个过滤器都具备一个寄存器。称为屏蔽寄存器。其中标识符寄存器的每一位都有屏蔽寄存器的每一位所对应。事实上,这也对应着can数据。事实上,这也对应着看标准数据帧中的标识符段。
如下图所示。 此处重点在于屏蔽寄存器的作用。通过查阅stm32微控制器参考文档可以知道。当过滤器工作在屏蔽模式下时。屏蔽寄存器被置为1的每一位都要求can接收到的数据帧标识符段必须和对应的接收缓冲区标识位相同。否则予以滤除。以本程序为例。要点中要求将节点接收缓冲标识符配置为0x00AA0000。过滤器屏蔽标识符为0x00FF0000。该节点接收到的数据帧的标识符段的位[23:16],必须和接收缓冲区标识符中的[23:16]匹配。否则予以滤除。但若满足了这一条件而即便如下的位不匹配。则该数据帧仍不会被滤除。正如本程序而言。即can接口仅仅接收标识符段的位[23:16]为0xAA的数据帧.
此处重点在于屏蔽寄存器的作用。通过查阅stm32微控制器参考文档可以知道。当过滤器工作在屏蔽模式下时。屏蔽寄存器被置为1的每一位都要求can接收到的数据帧标识符段必须和对应的接收缓冲区标识位相同。否则予以滤除。以本程序为例。要点中要求将节点接收缓冲标识符配置为0x00AA0000。过滤器屏蔽标识符为0x00FF0000。该节点接收到的数据帧的标识符段的位[23:16],必须和接收缓冲区标识符中的[23:16]匹配。否则予以滤除。但若满足了这一条件而即便如下的位不匹配。则该数据帧仍不会被滤除。正如本程序而言。即can接口仅仅接收标识符段的位[23:16]为0xAA的数据帧.
根据can总线物理层的要求。can总线的波特率和传输距离成反比关系。传输距离变化时,要根据位时序来调整can总线的波特率。

程序代码如下:
void RCC_Config(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1,ENABLE)
}
void GPIO_for_can_and_uart_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*设置can的RX--pa.11引脚*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*设置can的TX--pa.12引脚*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*设置usart1 的RX 脚 -PA.10为父浮空输入脚*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void Can_Config(void)
{
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
CAN_DeInit(CAN1);
CAN_StructInit(&CAN_InitStructure);
CAN_InitStructure.CAN_TTCM=DISABLE;
CAN_InitStructure.CAN_ABOM=DISABLE;
CAN_InitStructure.CAN_AWUM=DISABLE;
CAN_InitStructure.CAN_NART=DISABLE;
CAN_InitStructure.CAN_RFIM=DISABLE;
CAN_InitStructure.CAN_TXFP=DISABLE;
CAN_InitStructure.CAN_Mode=CAN_Mode_LoopBack;
CAN_InitStructure.CAN_SJW=CAN_SJW_1tq;
CAN_InitStructure.CAN_BS1=CAN_BS1_8tq;
CAN_InitStructure.CAN_BS2=CAN_BS2_7tq;
CAN_InitStructure.CAN_Prescaler=5;
CAN_Init(CAN1,&CAN_InitStructure);
CAN_FilterInitStructure.CAN_FilterNumber=0;
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit;
CAN_FilterInitStructure.CAN_FilterIdHigh=0x00AA<<3;
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x00FF<<3;
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=0;
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE;
CAN_FilterInit(&CAN_FilterInitStructure);
}
void main(void)
{
u8 TransmitMailbox=0;
CanTxMsg TxMessage;
CanRxMsg RxMessage;
RCC_Config();
GPIO_for_can_and_uart_Config();
USART_Config();
Can_Config();
TxMessage.ExtId=0x00aa0000;
TxMessage.RTR=CAN_RTR_Data;
TxMessage.IDE=CAN_ID_EXT;
TxMessage.DLC=8;
TxMessage.Data[0]=0x00;
TxMessage.Data[1]=0x12;
TxMessage.Data[2]=0x34;
TxMessage.Data[3]=0x56;
TxMessage.Data[4]=0x78;
TxMessage.Data[5]=0xab;
TxMessage.Data[6]=0xcd;
TxMessage.Data[7]=0xef;
TransmitMailbox=CAN_Transmit(CAN1,&TxMessage);
while((CAN_TransmitStatus(CAN1,TransmitMailbox))!=CANTXOK);
printf("rnThe CAN has send data :0x%x,0x%x,0x%x,0x%x,0x%x,0x%x,0x%x,0x%x,rn",
TxMessage.Data[0],TxMessage.Data[1],TxMessage.Data[2],TxMessage.Data[3],
TxMessage.Data[4],TxMessage.Data[5],TxMessage.Data[6],TxMessage.Data[7],);
while((CAN_MessagePending(CAN1,CAN_FIFO0)==0));
RxMessage.StdId=0x00;
RxMessage.IDE=CAN_ID_EXT;
RxMessage.DLC=0;
RxMessage.Data[0]=0x00;
RxMessage.Data[1]=0x12;
RxMessage.Data[2]=0x34;
RxMessage.Data[3]=0x56;
RxMessage.Data[4]=0x78;
RxMessage.Data[5]=0xab;
RxMessage.Data[6]=0xcd;
RxMessage.Data[7]=0xef;
CAN_Receive(CAN1,CAN_FIFO0,&RxMessage);
printf("rnThe CAN has received data :0x%x,0x%x,0x%x,0x%x,0x%x,0x%x,0x%x,0x%x,rn",
RxMessage.Data[0],RxMessage.Data[1],RxMessage.Data[2],RxMessage.Data[3],
RxMessage.Data[4],RxMessage.Data[5],RxMessage.Data[6],RxMessage.Data[7],);
while(1);
}









