SVPWM的永磁同步电机系统控制研究
永磁同步电机(PMSM)由于其重量轻、可靠性良好、体积较小等优势,目前以成为各种车辆中最为理想的执行单元。随着计算机科学、智能控制算法及特殊永磁材料的高速发展,PMSM已被广泛的应用于各种领域中。
本期通过理论研究,将电压空间矢量脉宽调制(SVPWM)方法应用于PMSM中,利用SVPWM电压利用率高等特点,提高了PMSM的可靠性,为实际的PMSM的设计与开发提供了思路。
1、永磁同步电机数学模型
为了对PMSM进行控制分析,首先需要构建PMSM的数学模型。在此,忽略PMSM中涡流、磁阻及磁滞的损耗,其数学模型如下所示:

式中,ud和uq表示定子电压d轴和q轴的分量;id和iq表示定子电流d轴和q轴的分量;Φd和Φq为两轴的定子磁链;Φf为永磁体磁链;Rs为定子绕组电阻;P为电机极对数;p为微分算子;Te为电磁转矩。
2、基于Simulink的PMSM仿真建模
基于Matlab2020的Simulink软件所建立的PMSM矢量控制系统的基本结构框图如下所示:
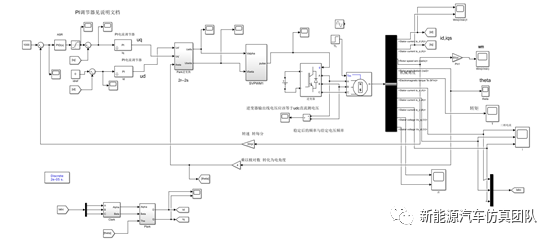
系统主要由逆变器、位置速度检测、SVPWM、PMSM等组成。系统中,速度环和电流环由PI调节器进行控制。
2.1、永磁同步电机模块
本文搭建的PMSM模块基于软件自带的Permanent Magnet SynchronousMachine的模块,该模型的输入为A、B、C三相电压输入和负载转矩Tm,电机的输出量为m。通过Permanent Magnet SynchronousMachine模型可以检测转速、转子、电流等信息。
2.2、主电路模块
主电路模块采用软件自带的Universal Bridge模块,该模块实现了所选电力电子设备的桥接。串联RC缓冲电路与每个开关器件并联。当模型离散化时,按Help获取建议的缓冲器值。对于大多数应用,二极管和晶闸管的内部电感Lon应设置为零。备注:逆变器输出线电压应该等于udc直流测电压。
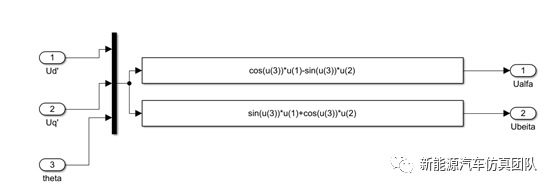
2.3、Park变换模块
Park变换器的定义:Park变换是将两相静止坐标下的电流变换到旋变坐标d、q下,其Simulink模型结构图为:
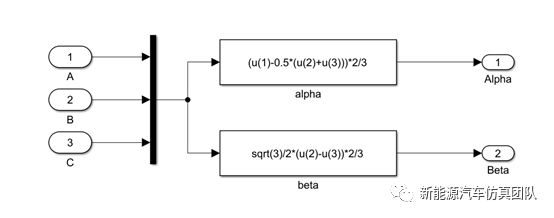
2.4、Clarke模块
Clarke变换器的定义:将三相对称坐标变换成两相静止坐标。
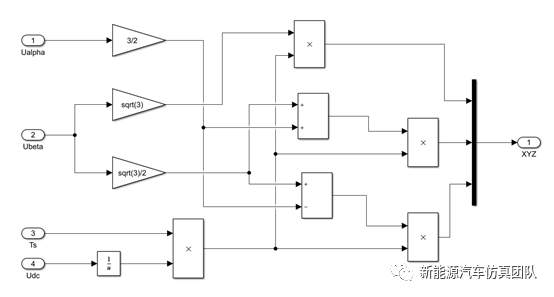
2.5、SVPWM模块
SVPWM主要以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波。通过形成的实际磁链来准确跟踪磁链圆,继而达到理想的控制效果。
三相电压型逆变电路上下桥臂的开关状态互为补充,所以只需要用上桥臂的开关状态就足以描述逆变器的工作状态。
(1)电压空间矢量
电压空间矢量脉宽调制(SVPWM)中的空间矢量既有正弦性,又应该具有时间上的正弦性。

(2)电压扇区判断
判断参考电压矢量所在扇区:


计算X、Y、Z以及T1、T2:

2.6、脉冲输出模块

3、仿真分析

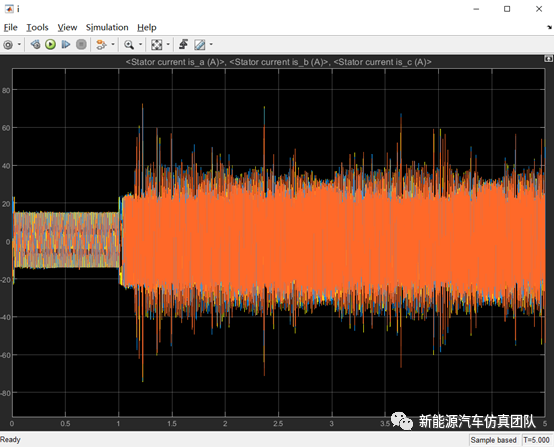
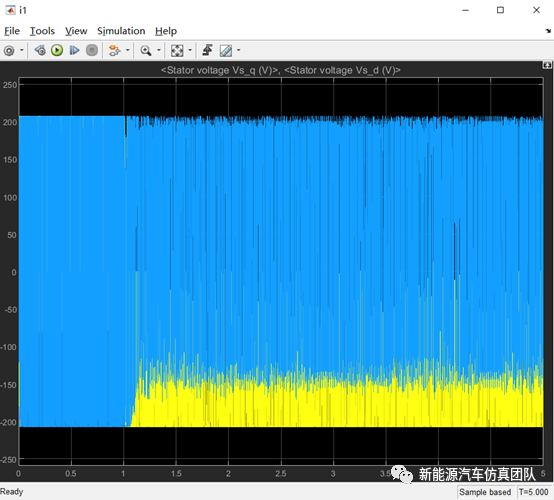
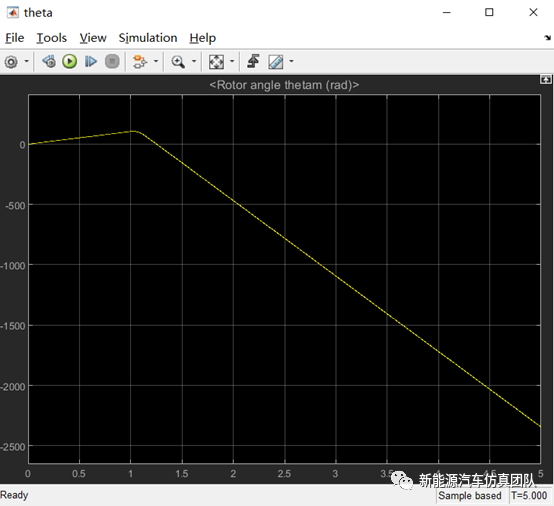
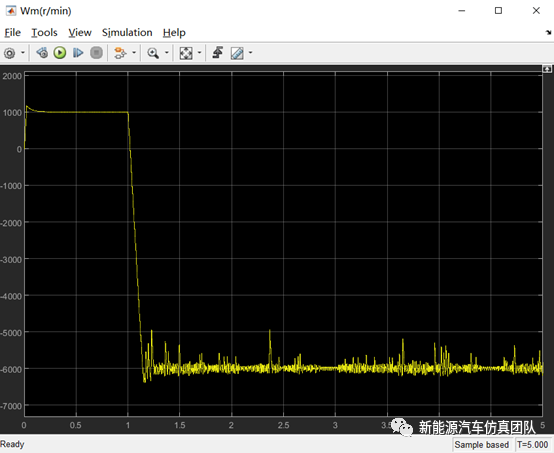
本期基于PMSM的数学模型,基于Simulink软件,采用SVPWM矢量控制策略搭建了永磁同步电机闭环控制模型。根据仿真结果可知:基于SVPWM的控制策略具有良好的静态和动态特性,仿真波形符合理论分析,系统运行较平稳。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。