






 技术咨询
技术咨询 代买器件
代买器件 商务客服
商务客服 研发客服
研发客服STM32是一系列由STMicroelectronics生产的32位ARM微控制器。它们被广泛应用于各种应用领域,如工业控制、汽车电子、嵌入式系统、通讯、医疗设备等。STM32具有低功耗、高性能、高可靠性的特点,支持多种通信接口和众多的外设,可满足不同应用领域的需求。
STM32F103器件采用Cortex-M3内核,CPU最高速度达72 MHz。该产品系列具有16KB ~ 1MB Flash、多种控制外设、USB全速接口和CAN。
STM32F103C8T6是一款基于ARM Cortex-M 内核STM32系列的32位的微控制器,程序存储器容量是64KB,需要电压2V~3.6V,工作温度为-40°C ~ 85°C。STM32F103C8T6具备高性能、低成本、低功耗的优点。
STM32F103C8T6是一个中密度性能线,配有ARM Cortex-M3 32位微控制器,48路LQFP封装。它结合了高性能的RISC内核,运行频率可达72MHz,以及高速内嵌存储器,增强范围的强化输入/输出和外部连接至两个APB总线.STM32F103C8T6具有12位模数转换器,计时器,PWM计时器,标准和高级通讯接口。一套全面的省电模式允许设计者设计低功耗应用。
STM32系列得益于Cortex-M3体系结构增强功能,包括为传达改进性能而设置的Thumb-2指令,带更好的编码密度,对中断更快的反应。
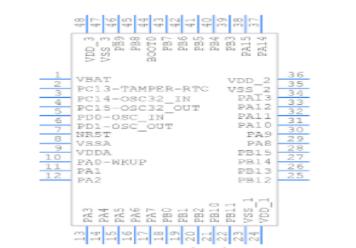
STM32F103C8T6引脚图
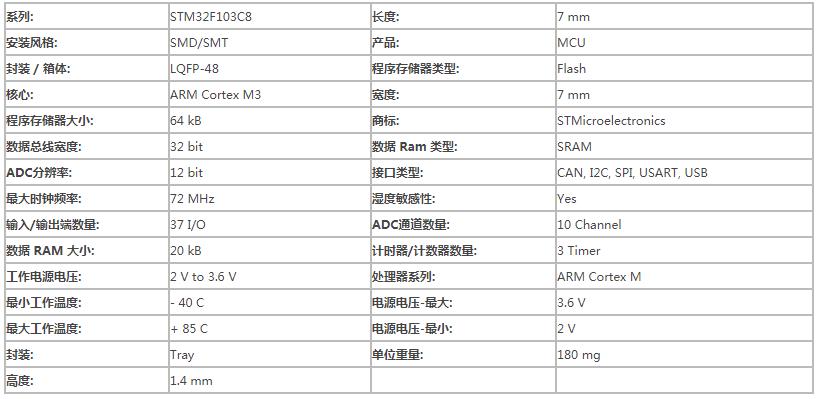
STM32F103C8T6参数特性
工作温度:-40°C ~ 85°C
封装/外壳:48-LQFP
高度:1.4 mm
长度:7 mm
总线宽度:32位
速度:72MHz
外围设备:DMA,
输入/输出数:37
程序存储器容量:64KB (64K x 8)
程序存储器类型:FLASH
RAM容量:20K x 8
电压-电源(Vcc/Vdd):2 V ~ 3.6 V
模数转换器:A/D 10x12b
振荡器型:内部
STM32F103C8T6是一款基于ARM Cortex-M3内核的低功耗微控制器,其优势包括:
1. 高速工作:主频最高可达72MHz,能够满足高速数据处理以及实时控制的需求。
2. 大容量存储:512KB的闪存和64KB的SRAM,能够支持复杂的应用程序和数据处理。
3. 丰富的接口:包括多个UART、SPI、I2C、CAN、USB等通信接口和多个DMA通道,可方便地连接各种外设。
4. 低功耗模式:支持多种低功耗模式,可最大限度地节省电能消耗,延长系统使用寿命。
5. 具有良好的开发环境:STMicroelectronics提供完整的开发方案,包括Keil、IAR等多种IDE,易于使用和调试。 基于以上优势,STM32F103C8T6广泛应用于工业自动化、家庭智能、汽车电子、医疗器械等领域,是一款性价比极高的微控制器。
STM32F103C8T6是一款基于ARM Cortex-M3内核的32位微控制器,它具有高性能、低功耗、丰富的外设接口等特点。 STM32F103C8T6广泛应用于工业自动化、智能家居、电子教育等领域,可以用来开发各种类型的应用程序和项目,例如:
1. 嵌入式系统开发:STM32F103C8T6可以用于开发小型嵌入式系统,如智能家居、物联网设备等。
2. 机器人设计:STM32F103C8T6可以用于机器人控制和运动控制,如3D打印机、工业机器人、无人机等。
3. 移动设备控制:STM32F103C8T6可以用于开发智能手机、平板电脑、智能手表等设备的控制。
4. 电子游戏开发:STM32F103C8T6可以用于开发各种类型的电子游戏,如街机游戏、平台游戏等。
5. 传感器处理:STM32F103C8T6可以用于处理各种类型的传感器数据,如光线传感器、温度传感器、加速度传感器等。 总之,STM32F103C8T6是一款功能强大、应用广泛的微控制器,可以用于各种类型的电子项目开发。
开发板STM32F103C8T6是一款基于ARM Cortex-M3内核的微控制器,由意法半导体(STMicroelectronics)生产。该开发板具有众多的特性和应用场景,以下是一些主要特性:
1. 72MHz主频的32位处理器。
2. 64KB Flash存储器、20KB的SRAM。
3. 提供许多通用IO引脚,适用于多种外设连接。
4. 支持多种通信接口,例如SPI、I2C、UART等。
5. 可以通过USB接口进行在线下载程序和调试。
6. 具有多个定时器和PWM输出功能,适用于各种控制应用。 硬件方面,开发板STM32F103C8T6包括STM32F103C8T6芯片、晶振、USB接口、ESP8266无线模块、IO扩展板、LED显示屏等部分。
它被广泛应用于各种嵌入式系统和智能控制器的设计和开发中,如自动化控制、家庭自动化、机器人、无人驾驶等。由于其强大的处理能力、灵活的IO接口和丰富的通信接口,被许多工程师和开发者所喜爱和使用。
基于STM32F103C8T6的PWM信号控制电机驱动器
要控制电机转速,需要使用PWM信号控制电机驱动器。
以下是使用STM32F103C8T6开发板控制电机转速的一般步骤:
1. 连接驱动器:将电机驱动器与开发板中的定时器模块连接。可以使用PWM输出来输出PWM信号。将定时器模块的输出引脚连接到驱动器模块的PWM输入引脚。
2. 设置输入模式:为了控制电机转速,需要将定时器模块设置为PWM输入模式。这允许你编写输出PWM信号的程序并向驱动器发送控制电压。
3. 编写程序:编写一个程序,在程序中使用PWM输出控制电压。PWM信号的占空比与电机的转速成正比。因此,通过改变PWM信号的占空比,可以改变电机的转速。
示例代码: ```c #include “stm32f10x.h” #include “stm32f10x_tim.h” #define PWM_TIM TIM3 #define PWM_FREQ 5000 // PWM信号的频率 #define PWM_CH GPIO_Pin_6 #define PWM_PORT GPIOA #define PWM_PERIOD 2000 // PWM信号的周期 void TIM_Config(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); TIM_DeInit(PWM_TIM); TIM_TimeBaseStructInit(&TIM_TimeBaseStructure); TIM_TimeBaseStructure.TIM_Prescaler = ((SystemCoreClock/2)/PWM_FREQ)-1; TIM_TimeBaseStructure.TIM_Period = PWM_PERIOD - 1; TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(PWM_TIM, &TIM_TimeBaseStructure); TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_Pulse = 0; TIM_OC1Init(PWM_TIM, &TIM_OCInitStructure); TIM_OC1PreloadConfig(PWM_TIM, TIM_OCPreload_Enable); TIM_CtrlPWMOutputs(PWM_TIM, ENABLE); TIM_Cmd(PWM_TIM, ENABLE); } int main(void) { TIM_Config(); while(1) { for (int i = 0; i 《= PWM_PERIOD; i += 100) { TIM_SetCompare1(PWM_TIM, i); for (int j = 0; j 《 100000; j++); // 延时等待 } } } ```
在这个示例中,我们使用TIM3输出PWM信号。将IO口PA6设置为PWM电机的输入引脚。TIM_Config()函数用于初始化TIM3定时器并设置PWM频率和周期,然后使用for循环来控制PWM占空比并输出PWM信号,从而控制电机的转速。
我们再分享一个基于STM32F103C8T6的ADC模拟电压读数,计算数值大小,并显示在LCD显示屏上。
相关代码:
/*
* LCD VSS pin to GND
* LCD VDD pin to 5V
* LCD VO pin to POT
* LCD RS pin to digital pin PB11
* LCD RW pin to GND
* LCD EN pin to digital pin PB10
* LCD D0 to D3 pins not used
* LCD D4 pin to digital pin PB0
* LCD D5 pin to digital pin PB1
* LCD D6 pin to digital pin PA7
* LCD D7 pin to digital pin PA6
* LCD LED+ pin to 5V
* LCD LED- pin to GND
*/
#include 《LiquidCrystal.h》
const int rs = PB11, en = PB10, d4 = PB0, d5 = PB1, d6 = PA7, d7 = PA6;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
const int analogInput = PA0;
void setup()
{
lcd.begin(16, 2);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(“Electronics Hub”);
lcd.setCursor(0, 1);
lcd.print(” ADC in STM32 “);
delay(2000);
lcd.clear();
}
void loop()
{
int analogVal = analogRead(analogInput);
float inputVoltage = (float(analogVal)/4096) * 3.3;
lcd.setCursor(0, 0);
lcd.print(“ADC Value:”);
lcd.print(analogVal);
lcd.setCursor(0, 1);
lcd.print(“Voltage:”);
lcd.print(inputVoltage);
}
最后再分享一个简单的stm32单片机点灯代码示例,使用的开发板为STM32F103C8T6: ``` /* Includes */ #include “stm32f1xx_hal.h” /* Private variables */ GPIO_InitTypeDef GPIO_InitStruct; /* Initialize all configured peripherals */ void MX_GPIO_Init(void) { /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOA_CLK_ENABLE(); /* Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET); /* Configure GPIO pin */ GPIO_InitStruct.Pin = GPIO_PIN_5; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); } /* Main program */ int main(void) { /* Initialize GPIO pins */ HAL_Init(); MX_GPIO_Init(); /* Infinite loop */ while (1) { /* Turn on the LED */ HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET); /* Pause for a short period */ HAL_Delay(1000); /* Turn off the LED */ HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET); /* Pause for a short period */ HAL_Delay(1000); } } ```
该代码将PA5设置为输出口,并在一个无限循环中,交替点亮和关闭该口以控制LED灯的亮灭。请注意,使用HAL_Delay()函数需要在CubeMX中启用SysTick定时器。
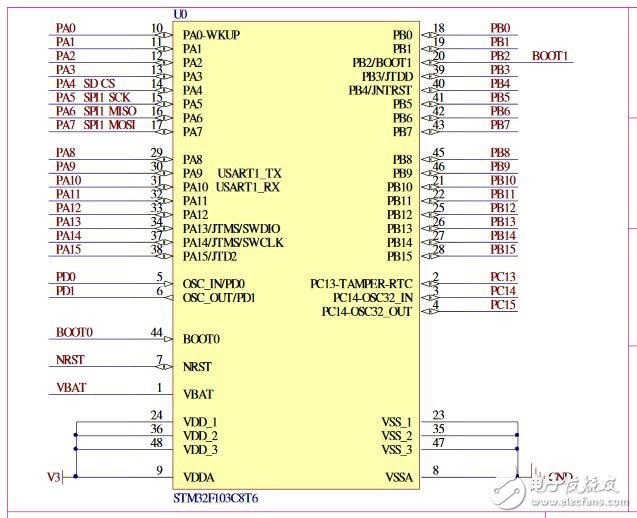
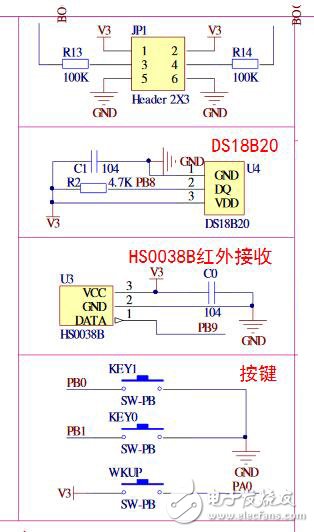
STM32F103C8T6引脚图以及一些STM32F103C8T6应用电路图:
STM32F103C8T6引脚 DS18B20、HS0038B红外接收:
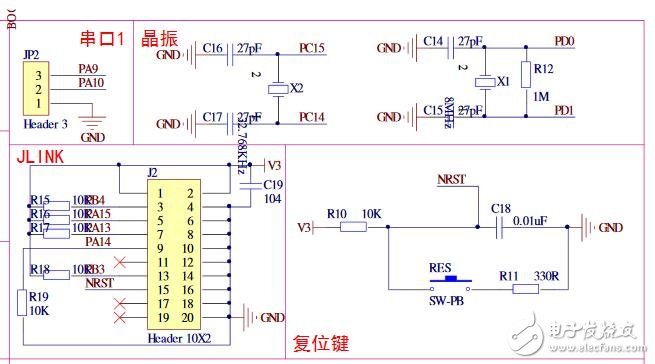
STM32F103C8T6引脚图 串口、晶振、复位键:
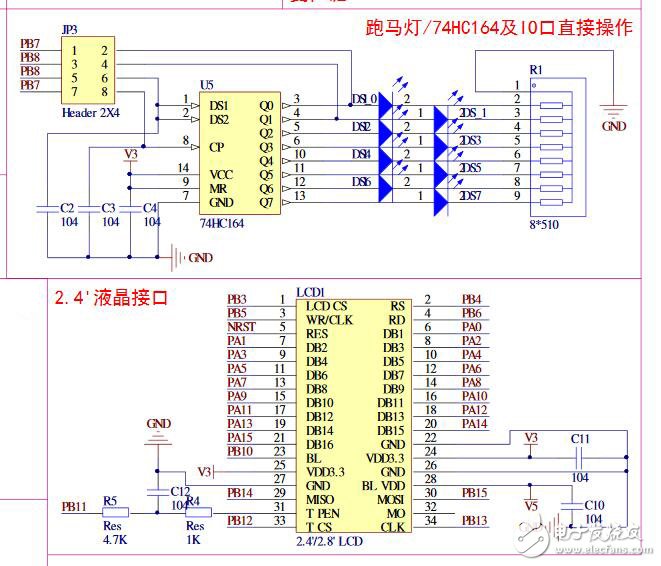
STM32F103C8T6引脚图 跑马灯/74HC164及IO口直接操作 、2.4液晶接口:
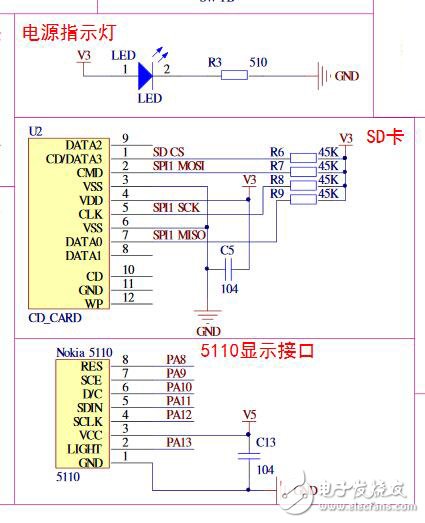
STM32F103C8T6 电源指示灯、SD卡、5110显示接口:
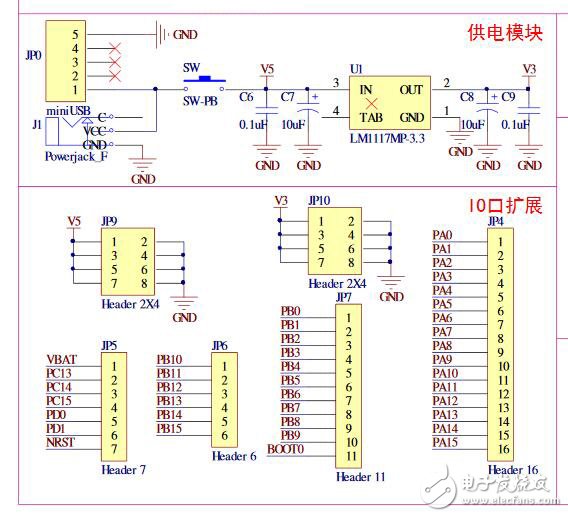
STM32F103C8T6 供电模块、IO口扩展:
相关文章









