前言
10x无源探头是我们最常使用的探头,几乎每个示波器都标配这种探头,但是即使这样,我们对它的认识上还是存在很多误区,并且错误的使用,导致测试结果的不准确,本文将介绍如何避免常见错误,并最大程度地利用好无源探头。
10x无源探头的最佳用法
使用10x无源探头时,有五个重要的最佳测量准则要遵守,以获得10x探头的最佳性能并避免常见的错误:1. 使用示波器前面板上的校准参考信号来补偿探头。2. 始终尝试使用可最大程度地减小环路电感的前端,较小的弹簧接地线或使用同轴连接DUT,将减少振铃失真,并将探测带宽扩展到最高频率。3. 始终尝试使用同轴与DUT连接,以减少从本地环境拾取射频干扰(RF)4. 探测低阻抗源时,考虑增加一个200Ω的串联电阻,以消除来自前端回路电感和10x探头输入电容的振铃。5. 切记10x探头的输入阻抗为9.5pF电容;不是10MΩ。
调整探头补偿
使用10x探头时,第一步也是最重要的一步是调整其补偿,即使对于20 MHz带宽或上升时间长达50 ns的信号,补偿对于使探头的信号失真最小化也很重要。要检查探头补偿,将探头连接到示波器前面板上的Cal参考信号,图1显示了HDO4096示波器前面板的连接图。

图1 显示的是Cal参考端子的特写
在Cal端子处是一个1Vpk-pk,1kHz方波,其固有上升时间约为3 ns,源阻抗为800欧姆,高阻抗是一项安全特征,可防止探头的接地夹意外连接至Cal信号输出引脚,在这种情况下,电流被限制在1 mA左右,不会对探头、示波器或操作人员造成危险。

图2 用电缆插头端的螺钉对10倍无源探头进行补偿
每个示波器都可以将此上升时间短的1 kHz信号作为参考信号来调整10x探头的补偿,示波器探头补偿可以通过探头末端的小定位螺钉进行调节。正确调整补偿后,测得的方波将看起来像平坦的方波,但是,当探头补偿不足或补偿过度时,平坦边缘会变形(图3)。
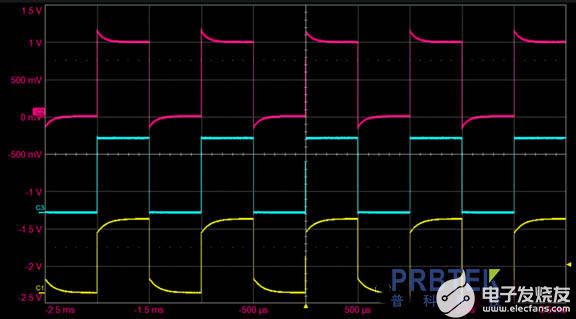
图3. 从上到下显示的是相同的10x探头在不同的补偿设置下测得的Cal信号:过补偿,正确补偿,欠补偿
考虑到可以在此1kHz方波中看到补偿的影响,可以证明,即使对于低速信号,补偿也很重要,在使用任何10x无源探头之前,请务必使用方波Cal信号检查其补偿,如果方波不是如图2中所示那样平坦,则调整补偿螺丝直到其变平。
探头前端环路电感的重要性
10x无源探头性能的主要障碍是前端电感,仅当在探头前端使用同轴连接时,才能实现最高带宽测量,每当信号和返回路径分开以与DUT接触时,就会出现两个问题:
1. 它会在探头前端引入电感不连续,这会引起振铃,并且,
2. 探头前端的作用就像天线,会吸收周围的射频噪声。
直径为1英寸圆环的电感约为85 nH,根据前端和其接地回路带所形成的环路的大小,前端的环路电感可能高达200 nH,较高的前端环路电感的结果是减小了10x探头的带宽,并在传递函数中引入了LC谐振峰。谐振峰的高度将取决于DUT的源阻抗,源阻抗越低,Q越高,传递函数中的峰值越高。图4显示了前端具有200nH环路电感和源阻抗为50Ω的传递函数,其中还包括具有较大的前端环路电感时50Ω信号源快速边沿的测量响应。
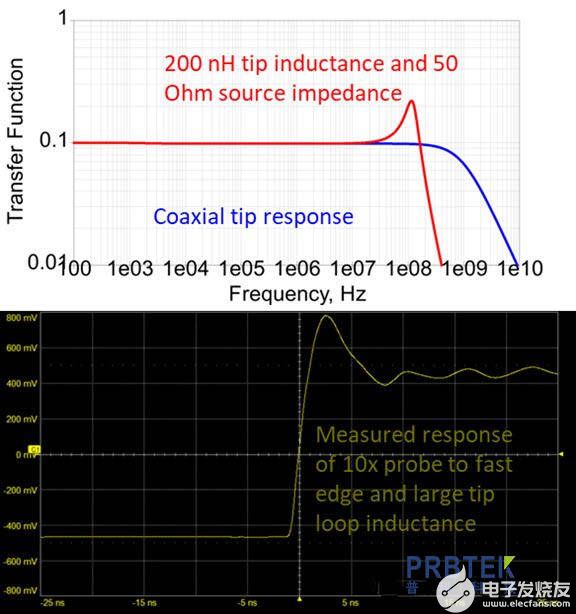
图4:探头尖端的环路电感为200nH,源电阻为50Ω的探头显示出失真的传递函数
但是,当减小DUT的源阻抗时,由前端电感和10x探头的9.5 pF输入电容组成的LC电路的Q会增加,这会增加传递函数的峰值,并导致较高的振铃(图5)。在此示例中,具有非常低的输出阻抗的5V电源轨被关闭和打开,瞬态响应显示在大约80MHz处有很多振铃,这非常接近于根据200-nH的前端环路电感和9.5pF的探头输入电容计算出的传递函数峰值:约100 MHz。
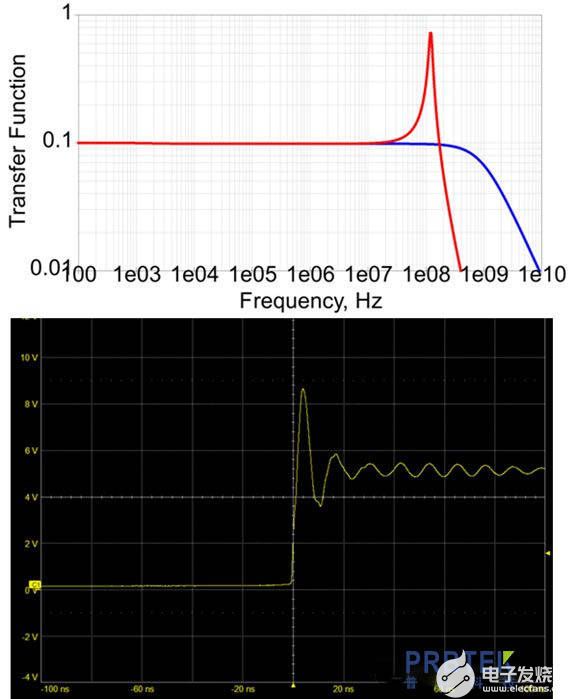
图5:测试低源阻抗的DUT时,前端回路电感和10x探头的输入电容的Q会导致传递函数出现一个大的峰值,这在时域表现为在峰值频率处出现振铃
最小化前端回路电感始终很重要,但是,如果引线分散开以接触DUT焊盘,则总会有一些前端环路电感,当源阻抗低时,Q可能会很高,可能会产生人为的振铃。解决此问题的另一种方法是在探头前端增加一个串联阻尼电阻。









