STM32CubeMX系列 | PWM输出
1. PWM简介
脉冲宽度调制(PWM,Pulse Width Modulation)简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。即对脉冲宽度的控制,PWM原理如下图示:
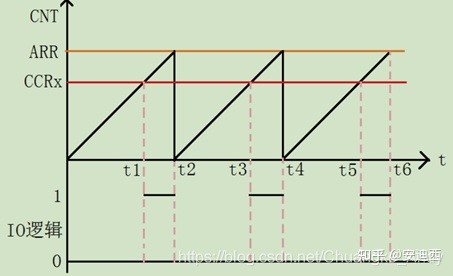
图中我们假定定时器是工作在向上计数PWM模式,且当CNT < CCRx时输出0,当CNT >= CCRx时输出1,那么就可以得到如上的PWM示意图:当CNT < CCRx时,IO口输出低电平;当CNT >= CCRx时,IO口输出高电平;当CNT值达到ARR的时候,重新归零,然后重新向上计数,依次循环。改变CCRx的值就可以改变PWM输出的占空比,改变ARR的值就可以改变PWM输出的频率
输出模式有两种:PWM1和PWM2

输出极性:高电平有效和低电平有效
2. 硬件设计
本实验通过TIM3的通道1输出PWM信号,控制D7指示灯的亮度
D7指示灯
定时器TIM3

此处由于TIM3的CH1通道对应的管脚是PA6,开发板上的LED并没有连接在PA6上,如果要让这个通道映射到LED所接的IO口上,需要使用GPIO的复用功能重映射功能将PA6重映射到PC6

3. 软件设计
3.1 STM32CubeMX设置
RCC设置外接HSE,时钟设置为72MHz;TIM3的时钟挂载在APB1 Time Clocks上为72MHz
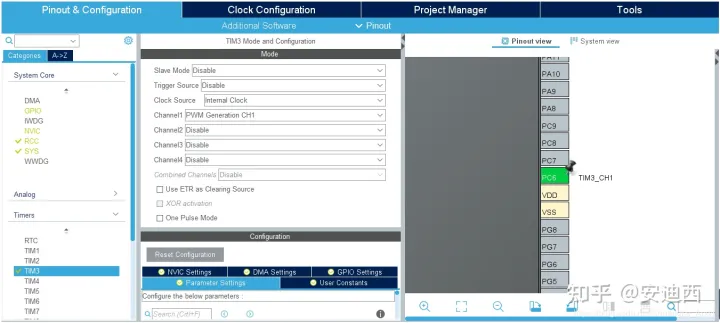
选择TIM3、设置定时器时钟源为内部时钟源、设置通道1为PWM模式(对应管脚PA6自动开启,此时应该选中PC6的TIM3_CH1完成重映射)、自行选择是否开启定时器中断
预分频系数设置为72-1,向上计数,自动重装载值设为500-1,则计时器时钟频率为1MHz,计时器周期为1us,定时器溢出周期(即PWM周期)为 500 * 1 = 500us,溢出频率(即PWM频率)为1/500us = 2KHz
PWM模式选择PWM1,Pulse默认为0,PWM极性设置为低电平(由于LED低电平点亮)

输入工程名,选择工程路径(不要有中文),选择MDK-ARM V5;勾选Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;点击GENERATE CODE,生成工程代码
3.2 MDK-ARM编程
在tim.c文件中可以看到定时器的初始化函数
void MX_TIM3_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = 72-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 500-1;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK){
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK){
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK){
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK){
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK){
Error_Handler();
}
__HAL_TIM_DISABLE_OCxPRELOAD(&htim3, TIM_CHANNEL_1);
HAL_TIM_MspPostInit(&htim3);
}
在main函数中编写代码,周期性的改变CCR1的值来改变PWM占空比
int main(void){
/* USER CODE BEGIN 1 */
uint8_t dir = 1;
uint16_t ledpwmval = 0;
/* USER CODE END 1 */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); //开启定时器PWM输出
/* USER CODE END 2 */
while (1){
HAL_Delay(10);
if(dir)
ledpwmval++;
else
ledpwmval--;
if(ledpwmval > 300)
dir = 0;
if(ledpwmval == 0)
dir = 1;
TIM3->CCR1 = ledpwmval; //更改CCR1的值来改变PWM的占空比
}
}
4. 下载验证
编译无误后下载到开发板,可以看到D7指示灯有暗变亮,再由亮变暗,呈现呼吸灯的效果
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。