1. 外部中断简介
STM32F1的每个IO口都可以作为外部中断的中断输入,STM32F103的中断控制器支持19个外部中断/事件请求。每个中断设有状态位,每个中断/事件都有独立的触发和屏蔽设置。STM32F103的19个外部中断为:
EXTI线0~15:对应外部IO口的输入中断
EXTI线16:连接到PVD输出
EXTI线17:连接到RTC闹钟事件
EXTI线18:连接到USB唤醒事件
EXTI线19:连接到以太网唤醒事件(互联网型产品)
STM32F103供IO口使用的中断线只有16个,但是IO口却远不止16个。下图为GPIO跟中断线的映射关系图

2. 硬件设计
用到的硬件资源有:
指示灯D1、D2
蜂鸣器BUZ
4个按键:KEY_UP、K1、K2、K3
硬件连接原理图如下,注意K1、K2、K3是低电平有效的,而KEY_UP是高电平有效。因此K1、K2、K3应设置为上拉、下降沿触发中断,KEY_UP应设置为下拉、上升沿触发中断 STM32F103芯片单个IO口最大输出电流是25mA,而蜂鸣器的驱动电流是30mA左右,整个芯片的输出电流最大为150mA,如果在蜂鸣器上就消耗30mA,那么芯片的其他IO口及外设电流就比较拮据了,因此此处不会直接使用IO口驱动蜂鸣器,而是通过三极管把电流放大后再驱动蜂鸣器,这样IO口只需提供不到1mA的电流就可以控制蜂鸣器 本实验利用板载的4个按键,通过外部中断来控制板载的两个LED的亮灭和蜂鸣器。其中KEY_UP控制蜂鸣器;K1控制D1,按一次亮再按一次灭;K2控制D2,按一次亮再按一次灭;K3同时控制D1和D2,按一次它们的状态就翻转一次

3. 软件设计
3.1 STM32CubeMX设置
RCC设置外接HSE,时钟设置为72M
PC0和PC2设置为GPIO推挽输出模式、上拉、高速、默认输出电平为高电平
PB5设置为GPIO推挽输出、高速模式
PA0设置为下拉、上升沿触发,PE2/3/4设置为上拉、下降沿触发

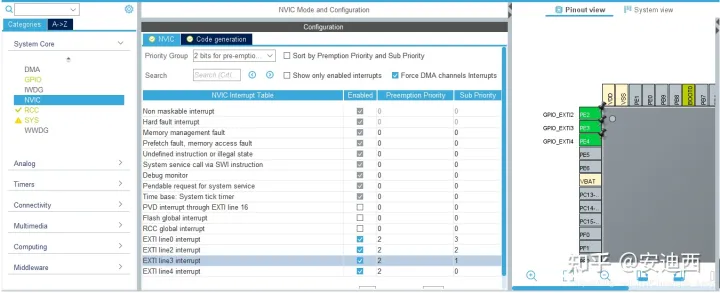
在NVIC(嵌套向量中断控制器)中,勾选EXIT Line0/2/3/4 interrupt,使能PA0和PE2/3/4中断。右边两个选项设置抢占优先级和响应优先级
输入工程名,选择工程路径(不要有中文),选择MDK-ARM V5;勾选Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;点击GENERATE CODE,生成工程代码
3.2 MDK-ARM编程
在gpio.c文件中可以看到PC0/PC1/PB5/PA0/PE2/PE3/PE4管脚的初始化函数
void MX_GPIO_Init(void){
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOE_CLK_ENABLE(); //开启GPIOE时钟
__HAL_RCC_GPIOC_CLK_ENABLE(); //开启GPIOC时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟
__HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, LED1_Pin|LED2_Pin, GPIO_PIN_SET); //LED1/LED2默认输出是电平为高电平
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(BUZ_GPIO_Port, BUZ_Pin, GPIO_PIN_RESET); //BUZ默认输出是电平为低电平
/*Configure GPIO pins : PE2 PE3 PE4 */
GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_3|GPIO_PIN_4; //PE2/PE3/PE4
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING; //下降沿触发
GPIO_InitStruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
/*Configure GPIO pins : PCPin PCPin */
GPIO_InitStruct.Pin = LED1_Pin|LED2_Pin; //PC0/PC1
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_InitStruct.Pull = GPIO_PULLUP; //上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0; //PA0
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; //上升沿触发
GPIO_InitStruct.Pull = GPIO_PULLDOWN; //下拉
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = BUZ_Pin; //PB5
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL; //无上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(BUZ_GPIO_Port, &GPIO_InitStruct);
}
找到弱符号中断回调函数原型,并在gpio.c中自定义该回调函数 __weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
HAL_Delay(10);
switch(GPIO_Pin){
case GPIO_PIN_0:
HAL_GPIO_WritePin(GPIOB,BUZ_Pin,GPIO_PIN_SET);
HAL_Delay(300);
HAL_GPIO_WritePin(GPIOB,BUZ_Pin,GPIO_PIN_RESET);
HAL_Delay(300);
break;
case GPIO_PIN_2:
HAL_GPIO_TogglePin(GPIOC,LED1_Pin);
break;
case GPIO_PIN_3:
HAL_GPIO_TogglePin(GPIOC,LED2_Pin);
break;
case GPIO_PIN_4:
HAL_GPIO_TogglePin(GPIOC,LED1_Pin);
HAL_GPIO_TogglePin(GPIOC,LED2_Pin);
break;
}
}
4. 下载验证
编译无误后下载到开发板,按下KEY_UP蜂鸣器响一下;K1控制D1,按一次亮再按一次灭;K2控制D2,按一次亮再按一次灭;K3同时控制D1和D2,按一次它们的状态就翻转一次









