整车控制器VCU控制原理图解析
组成
整车控制器主要由硬件和软件组成,硬件包括壳体和硬件电路,软件分为应用软件和底层软件。
壳体主要用于硬件电路的保护以及密封,要满足防水、防尘等清洁度要求,也要满足避免跌落、振动等机械要求。
硬件电路主要由主控芯片(32位处理芯片)及周边的时钟电路、复位电路、电源模块组成,一般还配备数字信号/模拟信号处理电路,频率信号处理电路和通信接口电路等。
应用软件和底层软件一般由C语言编写。应用软件主要是上层控制策略,主要负责根据车辆状态和驾驶员意图实时控制能量流向和分配比例。底层软件主要负责单片机初始化设置、CAN总线信号的实时收发和输入、输出信号的实时处理与诊断。


2.功能
a.驱动系统控制
根据驾驶员加速踏板的位置、档位、制动踏板力等操作意图,计算出电动机所需转矩等参数,协调各动力部件运动,保证电动汽车正常行驶。
b.整车能量管理和优化
根据实际工况,对整车进行管理,监控电动汽车充电以及制动能量的回收,控制车上其他用电设备,实现能量高效分配,提高整车经济性,延长整车使用寿命。
c.整车通信和网络管理
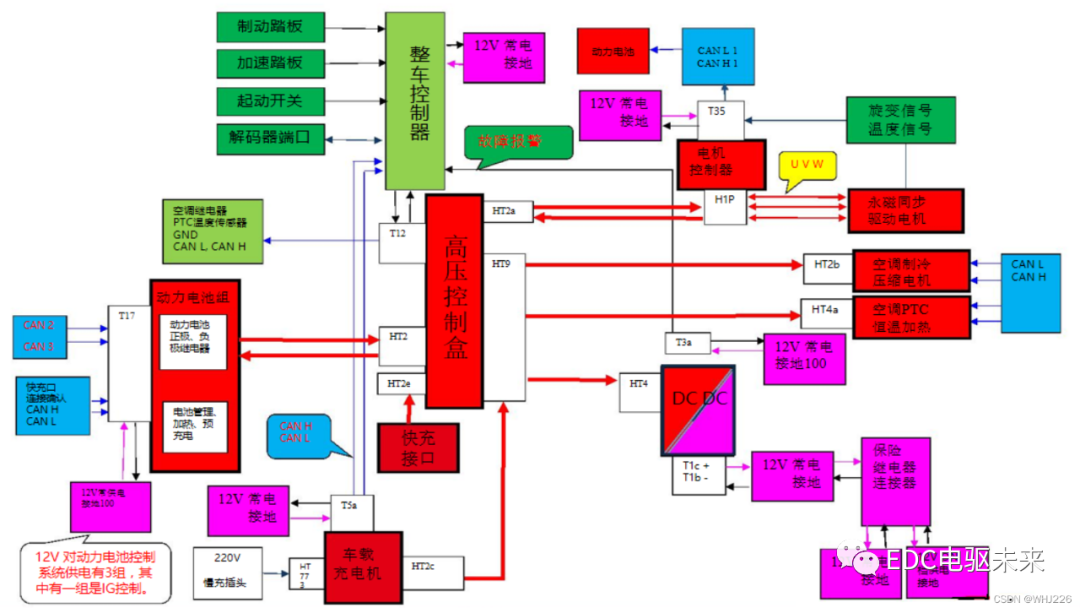
电动汽车上除了整车控制器,还有电动机控制器、电池管理系统等各个子控制系统,这些控制器之间需要通信,整车控制器通过CAN通信网络将各个子控制系统连接在一起,协调管理整个通信网络。
d.故障处理与诊断
实时监控各设备运行状态,对出现的异常情况进行诊断、提示和主动修复,保证电动汽车安全运行。
e.汽车状态显示
对汽车的状态信息进行采集和处理,将重要的状态和故障信息发送给仪表进行显示,如车速、电动机转速、电池剩余电量、电动机或者电池故障信息等。
3.工作模式
a.自检模式
当钥匙门信号处于ON挡,启动自检模式,整车控制器上电进行自检,如果自检通过则等待启动模式,如果自检失败则进入故障模式。
b.启动模式
钥匙门信号处于START挡,同时自检模式通过,整车控制器会唤醒整车CAN通信网络上的其他节点(电动机、变换器、空调系统等)开始工作,进行高压上电,当所有设备都正常启动后,整车进入READY状态,仪表上显示READY灯亮,指示驾驶员可以进行正常驾驶操作,完成启动模式。
c.起步模式
当驾驶员不踩加速踏板起步时,整车控制器会协调电动机转矩达到起步目标值,车速逐渐上升,并控制在合理的速度范围内,实现平稳起步。
d.行驶模式
在汽车行驶过程中,整车控制器实时采集驾驶员加速踏板位置以及开度变化率等信息,并根据当前车辆的行驶状态(车速、电池电流、电压、温度等),实时控制电动机的转矩和动力电池的输出功率,从而按驾驶员意图控制汽车的运行,实现前进、后退、巡航、加速等。
e.制动模式
当驾驶员踩下制动踏板时,汽车处于制动或减速状态时,整车控制器根据当前车辆行驶状态,计算出所需制动转矩,控制电动机转换为发动机模式,向动力电池充电。
f.停车模式
当驾驶员关闭钥匙,整车控制器控制子系统电,设备关闭后,完成停车。
g.故障模式
当整车控制器监控到汽车发生故障时,会启动自我诊断和主动修复功能,同时限制系统功率输出,使汽车进入限速或者紧急停止状态,并将故障信息显示给驾驶员。
h.充电模式
当插上充电枪时,充电动机开始工作,整车控制器会协调电池管理系统启动充电,并持续监测电池管理系统及充电动机的状态,将充电信息显示给驾驶员;当充电过程出现故障时,整车控制器会及时切断电池管理系统继电器,以中断充电过程。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。