一、引言
在异步电机矢量控制系统中,普遍采用在连续时间域内分析并随后离散化的方法进行电流调节器的设计,而当系统运行在高速条件下,受电机 轴耦合以及数字系统控制延迟的影响,将导致系统性能下降。
轴耦合以及数字系统控制延迟的影响,将导致系统性能下降。
基于电机离散化模型,对使用不同电流调节器的系统特性进行了对比和分析,并通过直接离散的复矢量电流调节器设计方法,使电流环不受电机转速影响,保证了系统在宽速度范围内运行的良好性能。
**二、离散域下PI电流调节器的实现 **
离散域下的PI电流调节器的实现,可分为以下几个步骤:
1、对异步电机进行离散化;
在静止坐标系中感应电机的数学模型可以等效成简单的 负载,表示如下:
负载,表示如下:

为了在离散域内对电流调节器的设计和性能进行分析,对感应电机在离散域内的建模至关重要。将上式所示的物理系统转换到离散域内的通常做法是将逆变器作为一个理想的零阶保持器,则在静止坐标系中感应电机模型在离散域内的表示为:

进行离散化处理后,得到:

将上式转换成同步旋转坐标系下的差分方程,然后得到旋转坐标系中的感应电机数学模型在离散域中的传递函数为:

2、根据离散化的异步电机模型,基于零极点对消的设计方法,直接设计含有可调参数的同步旋转坐标系下的离散域调节器;
引入直接离散的复矢量电流调节器,通过在离散域内直接对电流调节器进行设计,使离散电流调节器的零点与离散的电机模型的极点对消,避免了由离散化导致电流调节器性能的偏差。

3、可调参数K的分析计算;
4、最终离散域下电流调节器表达式的确定X;
5、根据 ,进行Z的反变换,求得
,进行Z的反变换,求得 的差分方程,进而求得。
的差分方程,进而求得。
**三、仿真对比分析 **

图3-1 离散域下PI电流调节器的实现
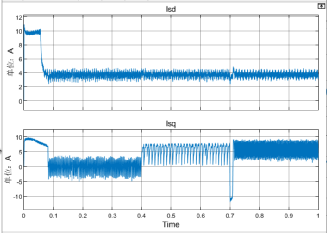
(a)传统PI电流调节器
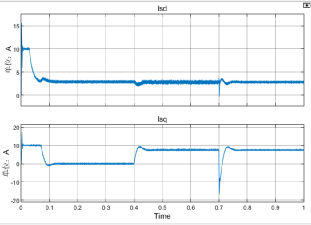
(b)离散域下设计的复矢量PI电流调节器
图3-2 采样率为5KHz时d、q轴电流变化情况

(a)传统PI电流调节器
(b)离散域下设计的复矢量PI电流调节器
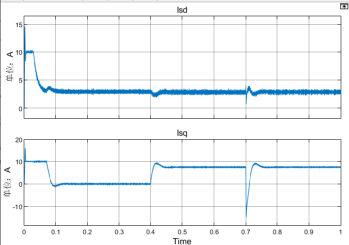
图3-2 采样率为10KHz时d、q轴电流变化情况
传统的PI电流调节器因为d、q、轴分离,所以有两个PI电流调节器独立控制d、q、轴电流。d、q轴并未完全解耦,且耦合项与 成正比,并且调节器还需要进行离散才能实现,这不可避免的就会引入离散误差。图3-2中的图(a)是传统PI调节器的d、q轴电流的变化情况,可以发现d、q轴的电流在采样率为5KHz、10KHz时纹波很大,基于离散域下设计的PI调节器下的d、q轴电流的纹波非常小。
成正比,并且调节器还需要进行离散才能实现,这不可避免的就会引入离散误差。图3-2中的图(a)是传统PI调节器的d、q轴电流的变化情况,可以发现d、q轴的电流在采样率为5KHz、10KHz时纹波很大,基于离散域下设计的PI调节器下的d、q轴电流的纹波非常小。
**四、总结 **
本文给出了直接离散的复矢量电流调节器的设计方法,通过在离散域内直接使电流调节器的零点与电机模型极点对消,保证了系统性能不受转速影响。仿真结果表明采用这种电流调节器设计方法能够在宽速度范围内获得良好的性能。