基于滑膜观测器的永磁同步电机无感控制
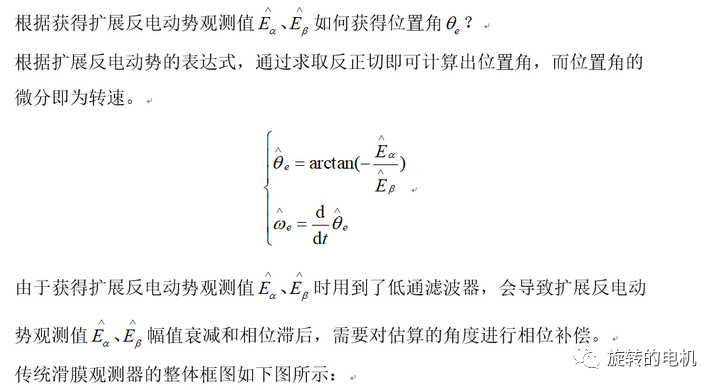
前言
本章节采用滑膜观测器SMO进行永磁同步电机的无感控制,首先介绍了状态观测器的原理,然后分析了滑膜观测器的原理设计了传统低阶滑膜观测器,并针对传统滑膜观测器存在“抖振”的问题,对建立的传统滑膜观测器进行改进,采用电控届经典资料AN1078的滑膜观测器改进方案进行控制,最后通过Matlab/ Simulink采用传统的三段式启动方法对该方案进行仿真分析。
一、状态观测器
PMSM有感控制是通过编码器或者霍尔传感器获得电机的位置角与速度,PMSM无感控制是通过观测器来估算电机的位置角与速度。 状态观测器,即根据系统的输入输出来估计系统的状态,如下图所示:
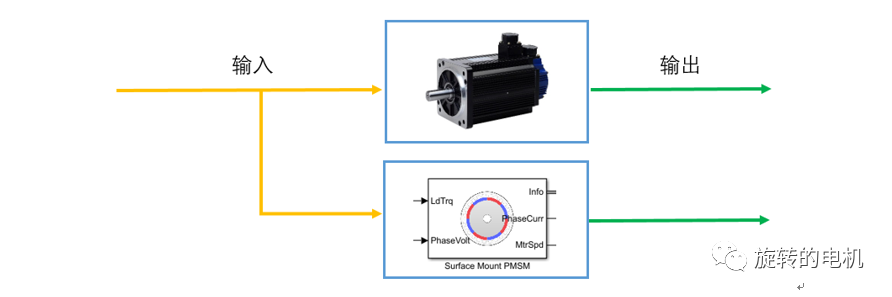
建立用于描述真实电机的数学模型,理论上如果建立的数学模型足够精确,当真实电机与电机数学模型具有相同的输入时,其必有相同的输出。 此时我们就可以通过建立的电机数学模型来获得我们所需要的电机状态量。 但上述系统会存在如下问题:
1、系统抗干扰能力差。 电机是一个高阶非线性、强耦合、多变量的复杂系统,一旦存在外部干扰或负载突变,此时的观测器很难响应正确的输入,以致输出错误或者系统崩溃;
2、误差的存在导致观测器的输出不准确。 误差的来源有系统误差和测量误差。 系统误差是建模不准确所带来的误差,我们所建立的数学模型与实际的电机不可能完全相同,会存在建模误差; 观测器的输入与真实输入的误差,观测器的输入是通过测量得来,会存在测量误差。
为了解决上述问题,我们对状态观测器增加反馈,通过反馈来不断的修正状态观测器的输出,使状态观测器尽可能的接近真实电机,如下图所示:
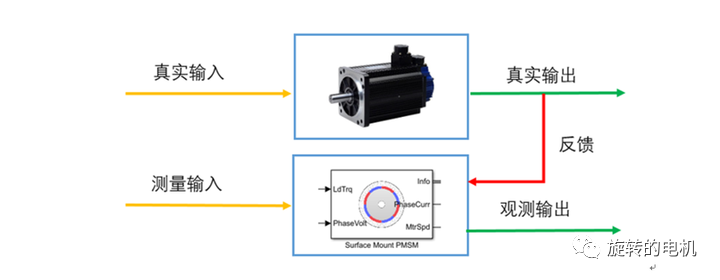
反馈方式与修正方式的不同产生了不同种类的状态观测器。
二、滑膜状态观测器
2.1.滑膜观测器的原理
从上述分析,我们对状态观测器增加反馈,通过反馈来不断的修正观测器的输出,使观测器尽可能的接近真实电机,反馈方式与修正方式的不同产生了不同种类的观测器。
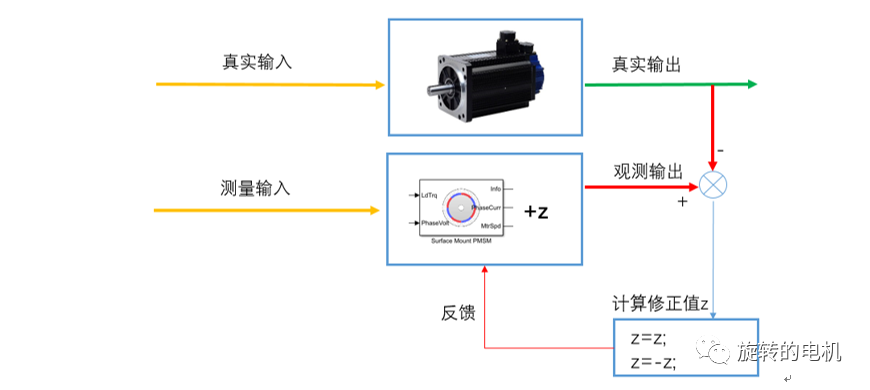
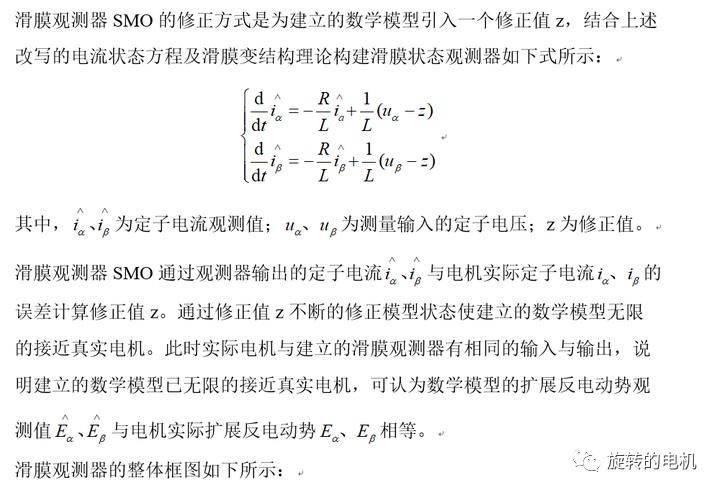
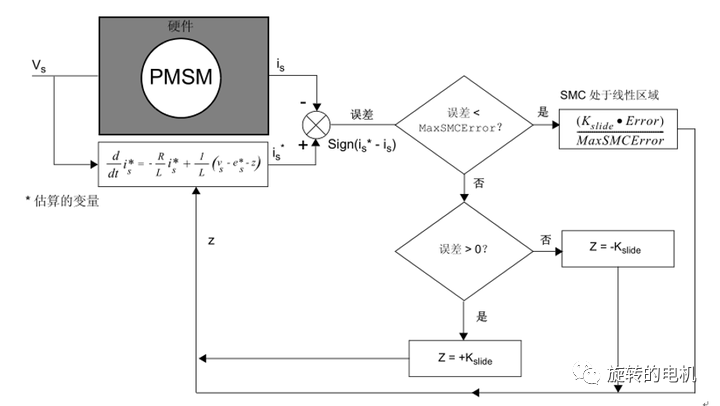
滑膜观测器的修正方式:滑膜观测器的修正方式是为建立的数学模型引入了一个修正值z,通过反馈来不断的计算修正值z,使电机数学模型无限的接近真实电机,就算外部突发干扰也能通过修正值z快速的修正状态。如果真实系统是一条曲线,SMO观测器就是围绕这条曲线来回滑动的线条,滑膜的名字即源于这种特性。
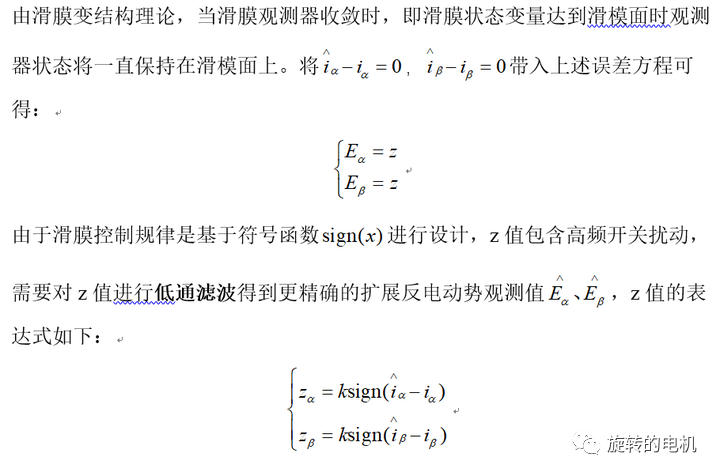
滑膜观测器的反馈方式:滑膜观测器的反馈方式即修正值z的计算方式,滑膜观测器的输出减去真实电机的输出,如果误差大于0,给数学模型加上修正值z;如果误差小于0,给数学模型减去修正值z,也即滑膜控制规律是基于符号函数 sign(x)进行设计。
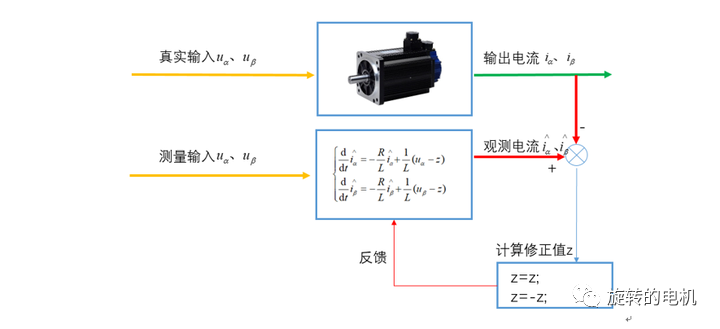
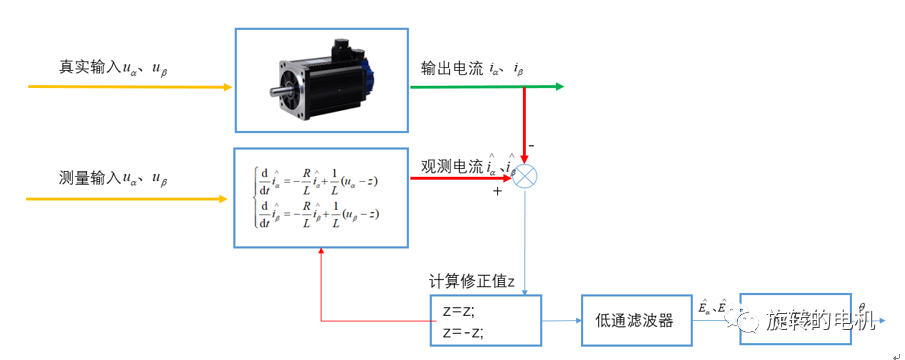
滑膜观测器的整体框图如下图所示:
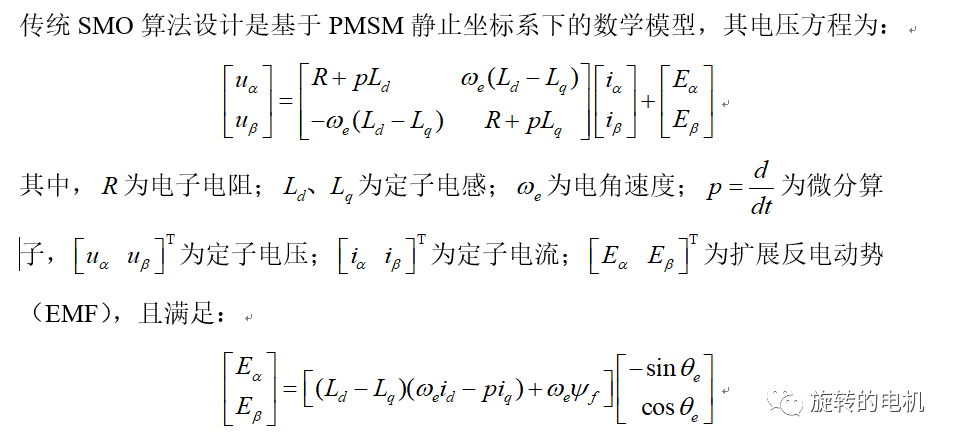
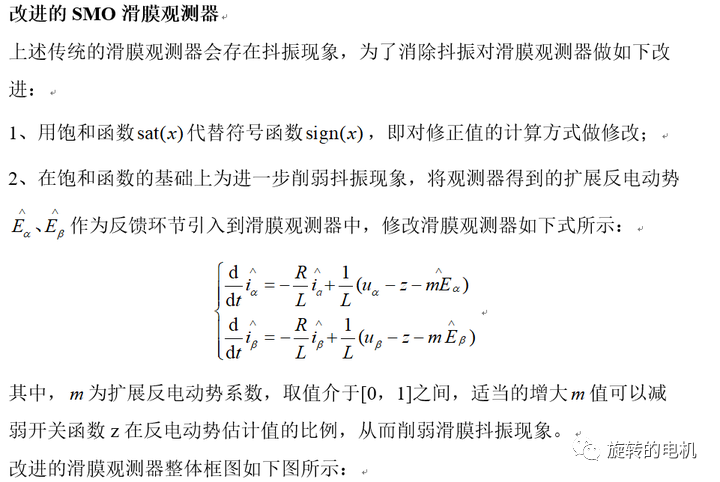
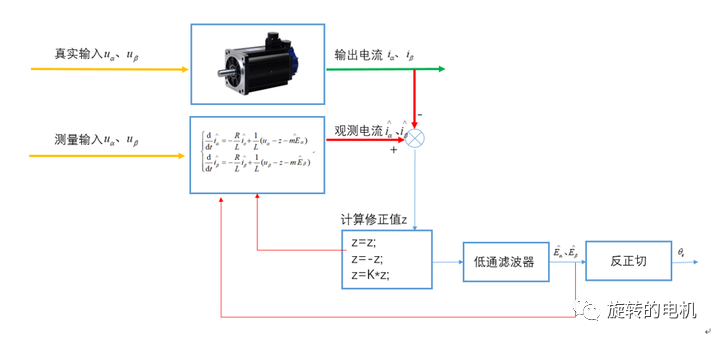
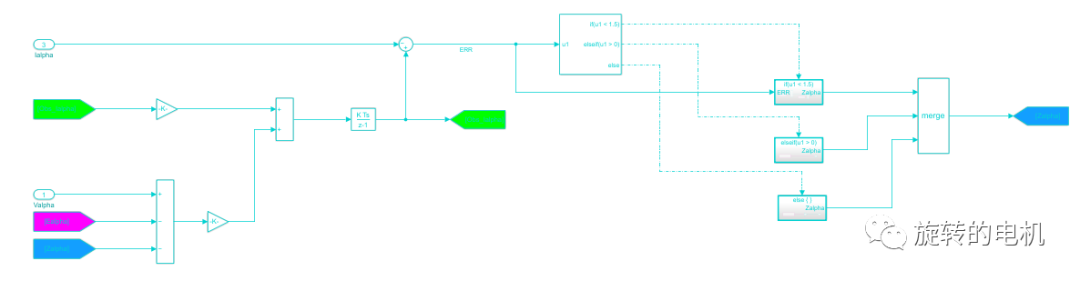
2.2.传统的滑膜观测器


三、Matlab/Simulink仿真分析
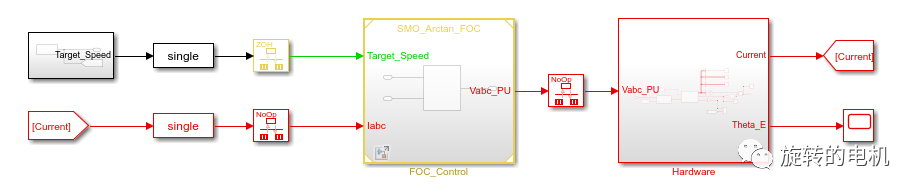
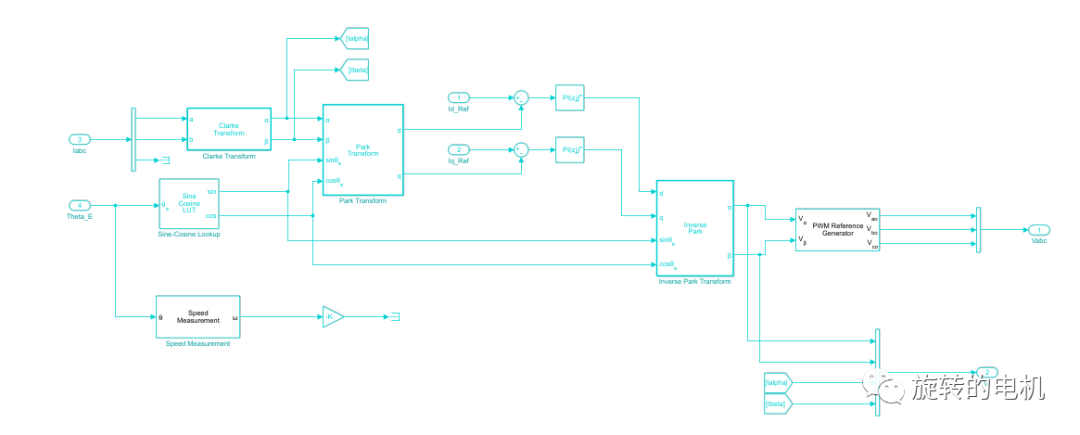
上图为PMSM基于滑膜观测器的无感控制整体框图,为了后续模型生成代码进行工程实现,本示例将控制算法部分单独建模,通过调用控制算法模型进行PMSM的控制。
3.1.仿真电路分析
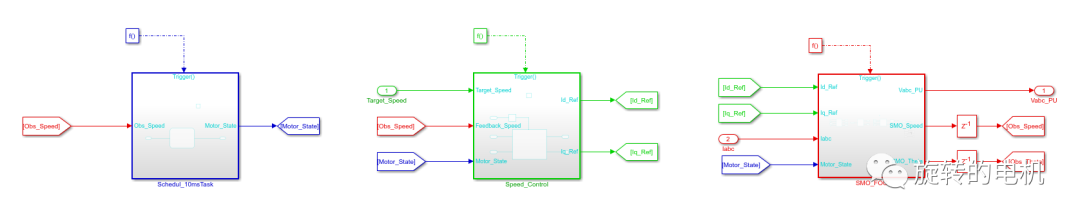
为了后续模型生成代码加载到底层进行工程实现,本示例建立了三个不同时间的调度任务。
10ms任务:用于电机控制模式的切换,本示例采用经典的三段式启动方式,即转子预定位、IF开环启动、开环切闭环进行无感控制。
速度环控制:相较于电流环速度环对实时性要求不高,带宽一般为电流环带宽的1/20,本示例将速度环设置为2ms任务。
电流环控制:电流环对实时性要求高,带宽高时间设置为FOC的执行时间20KHz。
3.1.1 电机控制模式切换10ms任务

设置转子预定位持续时间500ms;500ms后切换为IF开环控制;如果IF开环启动时间大于1s且此时的速度大于900RPM,则切换到无感闭环控制。
3.1.2 速度环控制2ms任务
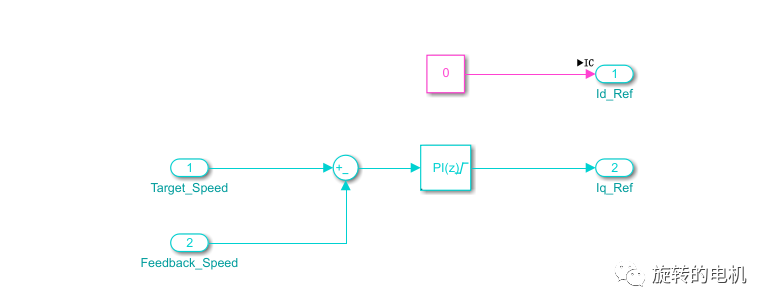
只有在无感闭环控制模式才用到速度环。
3.1.3 电流环控制50us任务

控制模式切换:
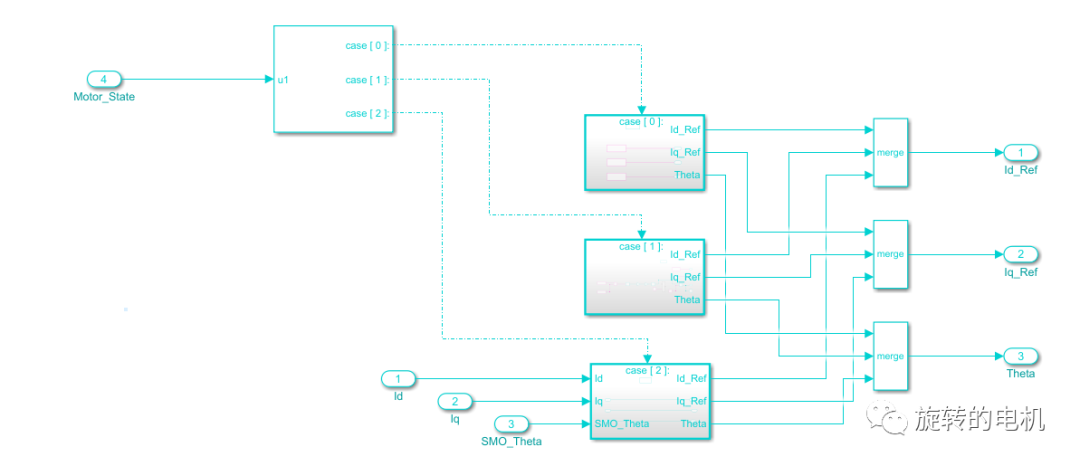
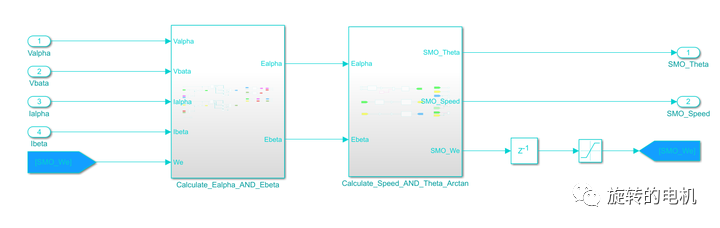
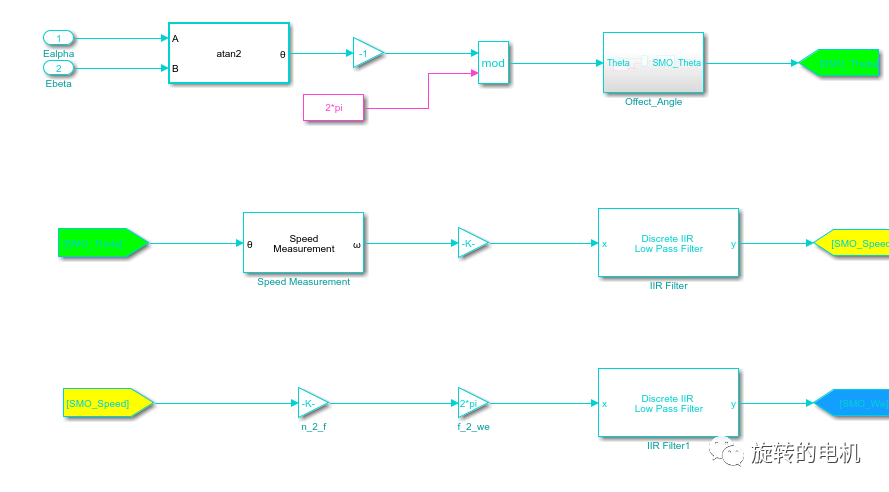
滑膜观测器:
FOC电流闭环:
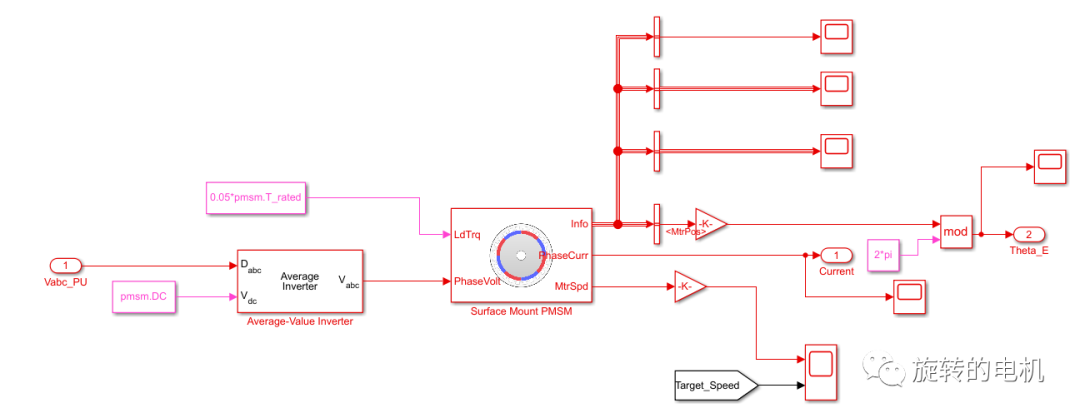
3.1.4 电机主电路
3.2.仿真结果分析
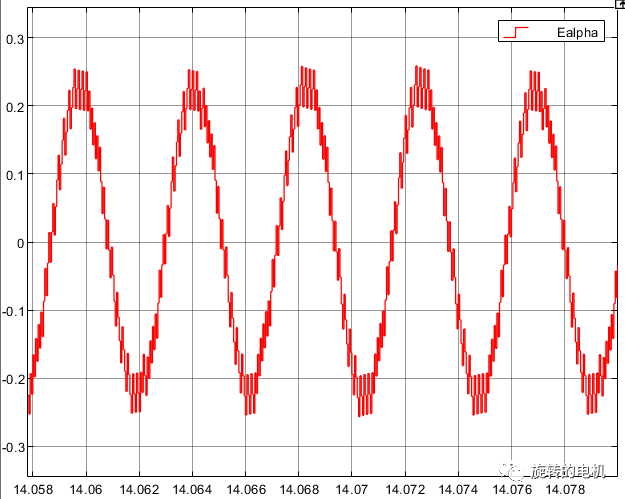
传统滑膜观测器反电动势观测值:
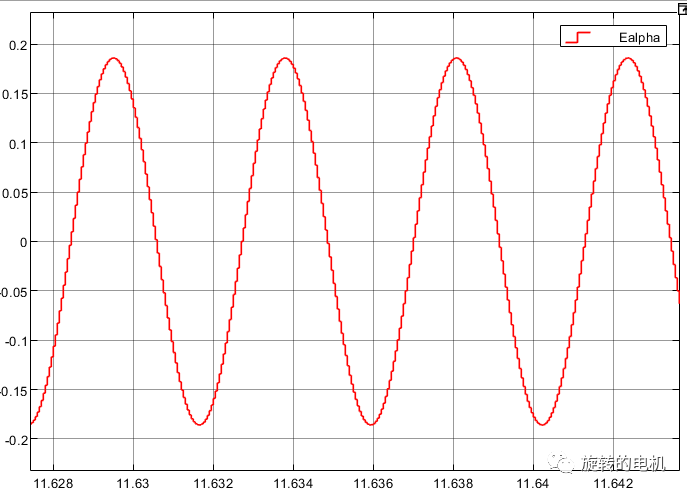
改进的滑膜观测器反电动势观测值:
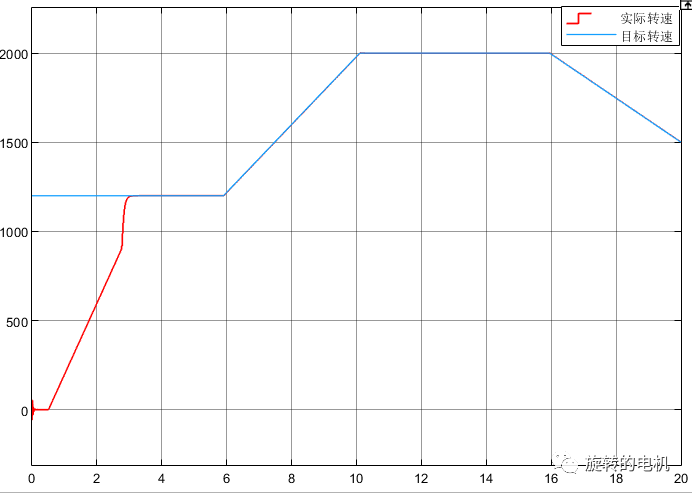
电机转速:
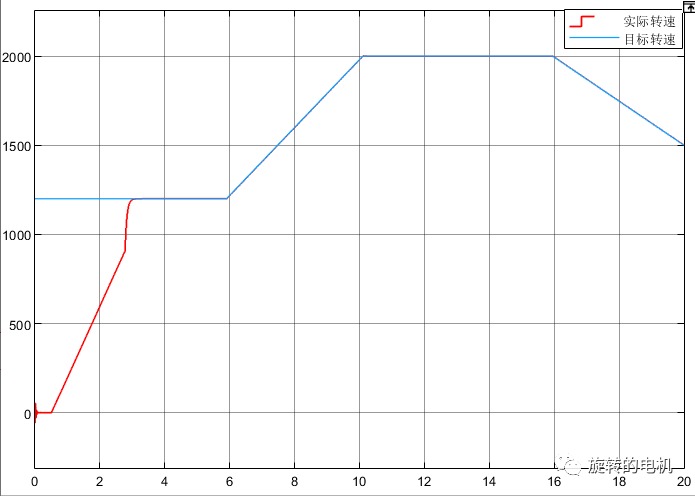
0~0.5s执行转子预定位:
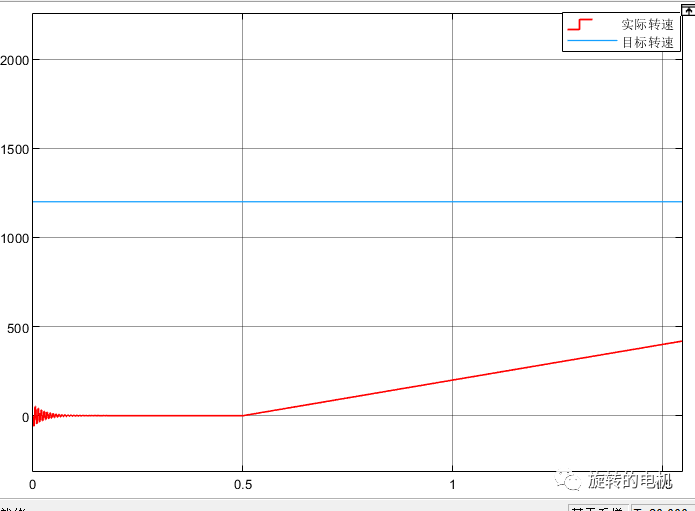
0.5s~2.76s为IF开环启动:
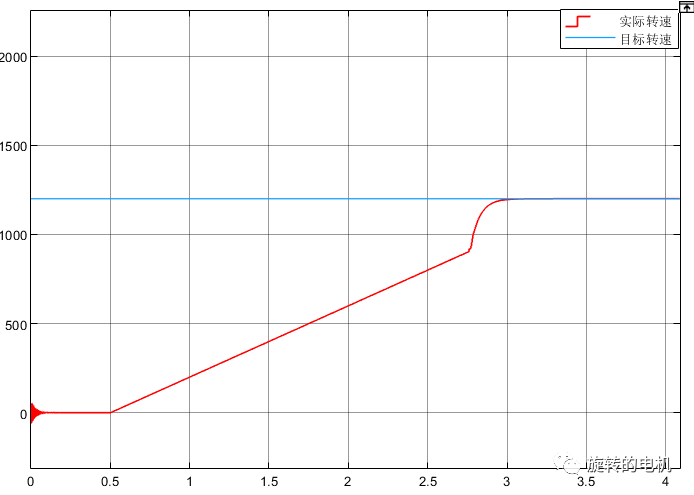
2.76s~20s为无感闭环控制:
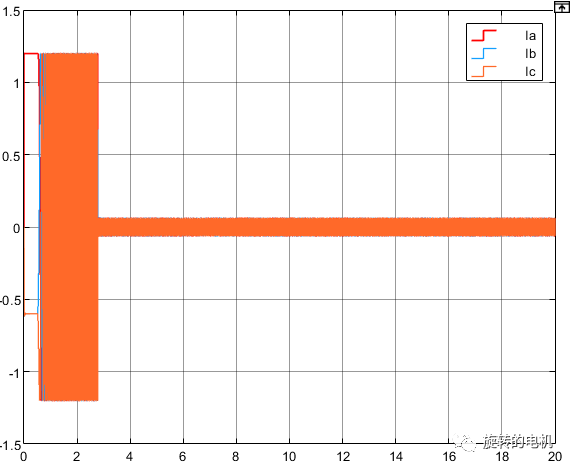
电机定子电流:
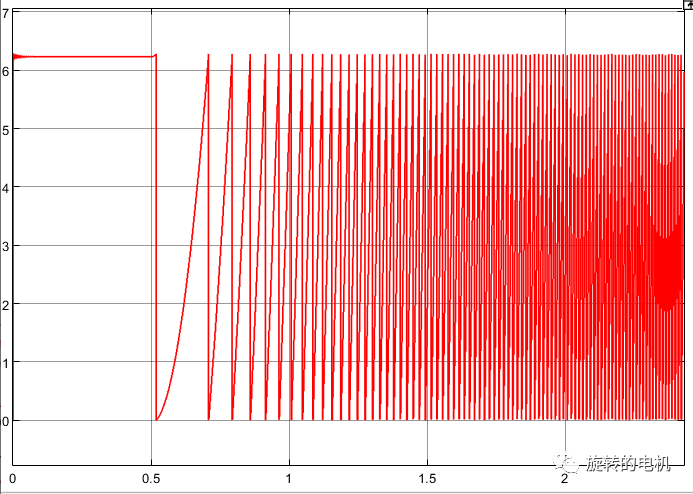
电机实际转子位置:
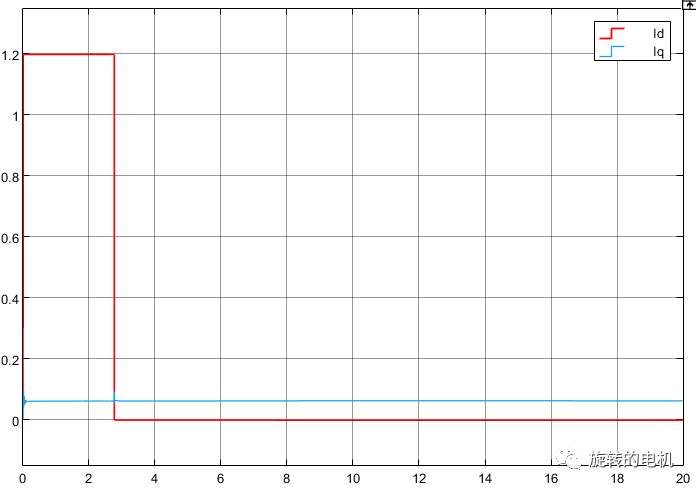
同步旋转坐标系下的定子电流Id、Iq:
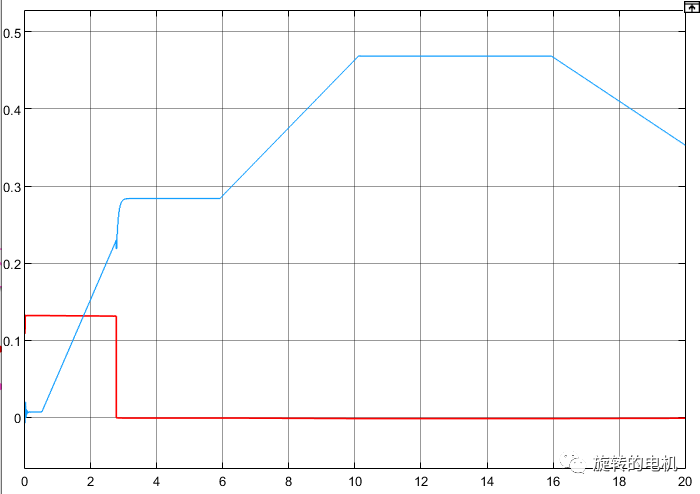
同步旋转坐标系下的定子电压:
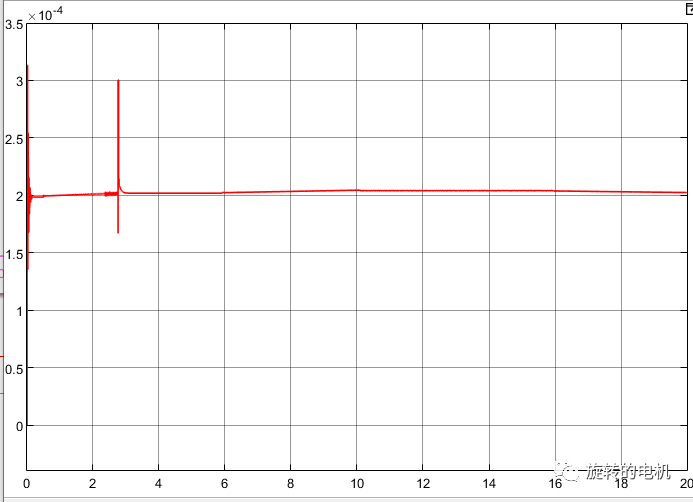
电磁转矩:
总结
本章节采用滑膜观测器SMO进行了永磁同步电机的无感控制,首先介绍了状态观测器的原理,然后分析了滑膜观测器的原理设计了传统低阶滑膜观测器,并针对传统滑膜观测器存在“抖振”的问题,对建立的传统滑膜观测器进行改进,采用电控届经典资料AN1078的滑膜观测器改进方案进行控制,最后通过Matlab/ Simulink采用传统的三段式启动方法对该方案进行仿真分析。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。