“自动泊车”原理是什么?AVP落地该如何解决?
随着城镇化水平的不断提高以及经济水平的快速增长,人们对汽车的需求量日益旺盛,汽车保有量持续增多。随之而来的是交通环境拥挤,城市停车位资源紧张,停车位空间小等问题。在这种环境下泊车容易引起局部交通堵塞、剐蹭事故的发生。在较大停车场停车容易产生找车位难、找车难等问题,给驾驶员带来困扰。另一方面,由于车辆和人均受自身条件影响而存在“视觉盲区”,泊车往往耗费大量的时间和精力,一直是新老司机的驾驶痛点。因此产业界致力于运用新技术让泊车变得更智能、更安全、更便捷。自动泊车的出现和发展为解决泊车问题提供新思路,有效解决驾驶员找位难、停车难等痛点。并且作为自动驾驶出行完整生态不可或缺的一环,提供了解决自动驾驶“最后一公里”难题的方法。
01什么是“自动泊车”
世界上第一辆汽车是德国人卡尔·本茨于1885年制造的,尽管和现代汽车相比它的性能并不完善,但由于使用到内燃机和实现了自动化,它的诞生具有划时代的重要意义。细心的朋友不难发现,汽车的英文”Automobile“,就分别有“自动”和“移动”的复合含义。
从第一部真正意义上的汽车面世至今,已经过了100多年的时间,汽车不仅在自动化和电气化方面有了飞速发展,还出现了智能化的趋势。“自动泊车”逐渐成为大家熟悉的功能,透过它我们能看到汽车智能化发展的缩影。
自动泊车系统简称APS,它是英文Automated Parking System的缩写。
搭载有自动泊车功能的汽车可以不需要人工干预,通过车载传感器、处理器和控制系统的帮助就可以实现自动识别车位,并自动完成泊车入位的过程。一般来说,在20万以上的中高端汽车上往往才有搭载,或者作为一项选装功能独立存在。
自动泊车系统可以大大简化泊车过程,特别是在极端狭窄的地方,或者是对于新手而言,自动泊车系统可以带来更加智能和更加便捷的体验。
02 “自动泊车”原理是什么?
自动泊车系统由多组传感器组成,比如遍布车身的雷达、摄像头等等,在采集好图像、距离等相关数据后,数据会传输给处理器,处理器将采集到的数据分析处理,形成自动泊车策略再将其转换成信号,控制系统接收到信号后依据指令控制汽车做出诸如转向、倒车和制动等动作,直至泊车过程完成。 自动泊车过程可以分为三个部分:车位探测、路径规划和路径追踪,就是我们通常理解的数据采集、路线生成和泊车执行。
自动泊车系统相关技术的研究最早在国外展开。该系统最早在 1992 年的德国大众概念车上搭载,由于成本较高,体积过大,没有将该系统量产;2003 年丰田普锐斯开始提供可选自动泊车功能;在国内,20 世纪 90 年代初出现的倒车雷达以及倒车影像,由于成本低、泊车辅助效果较好,目前依然是被广泛采用的泊车辅助手段。
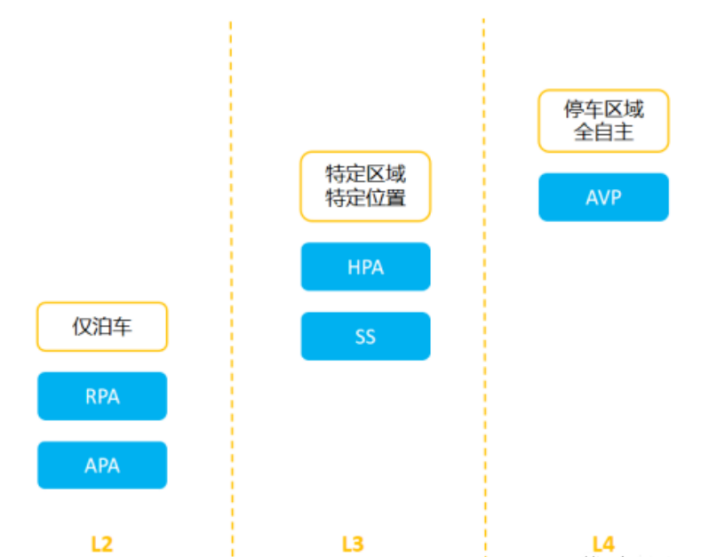
随着超声波检测技术和汽车线控底盘技术的发展,以及车企对消费者需求的关注,自动泊车系统开始出现并逐渐演进。自动泊车系统的发展大致经历了半自动泊车、全自动泊车、记忆泊车和自主代客泊车四个阶段。21世纪初量产的半自动泊车由系统自动控制转向盘,驾驶员控制加速及制动踏板,用户体验不佳,自动泊车功能使用率很低;近年来逐渐普及的全自动泊车系统解放了驾驶员的手和脚,用户体验得到质的提升,受到消费者的关注和欢迎。 下图汇总了当前主流的泊车功能,以及其对应的智能化等级、功能实现效果等。

资料来源:九章智驾
其中AVP,全称Automated Valet Parking,即自主代客泊车。AVP是真正意义上的全自动驾驶,车辆可以自行进入完全陌生的停车场,不需要先行学习,就能完成所有的泊车动作,并且不需要驾驶员在车上。其最终目标是取代传统的人工代客泊车,帮助用户节省大量的停车时间,解决高峰期排队停车的痛点。
AVP作为当前泊车场景的功能天花板,涉及的细分场景复杂,技术难度大,并且对保证车辆安全性来说,也是巨大的挑战。作为L4级别的智能驾驶,目前对软硬件,尤其是算法和安全性要求很高。
资料来源:九章智驾
03现实中的“自动泊车”
现实中的自动泊车功能使用起来既简便又高效,它可以辅助驾驶员完成自动泊入、水平泊出、自选车位等操作。
例如,泊车场景主要发生在停车场,按泊车的完整流程,泊车场景包括停车场内自动行驶、搜索车位、泊入和泊出车位等。
3.1 停车场内行驶
当前的停车场类型主要可以分为以下4种:地下停车库、停车楼、露天停车场和路边临时停车位。不同类型停车场的基础设施、路面状况、光照条件等都各不相同,因此车辆在不同停车场内行驶的表现也会有差异。
总体来说,在停车场内行驶,主要考察车辆的轨迹规划能力和感知定位能力,以及对障碍物的识别能力。
3.2 搜索车位
搜索车位的用户体验,主要考察车辆对车位的识别能力。车位识别的准确率越高,说明车位识别能力越强,用户的体验也会越好。
停车位的类型多种多样,按车位线情况可分为标线车位与非标线车位,按车位方向可分为垂直车位、水平车位与斜列车位等。
3.3 泊入和泊出车位
泊入车位是泊车过程的最后一步,也是自动泊车的最初应用场景。当搜索到适合的车位时,智驾系统便控制车辆自动泊入车位,期间的横纵向控制和挡位切换等操作,都由系统自动完成。
资料来源:九章智驾
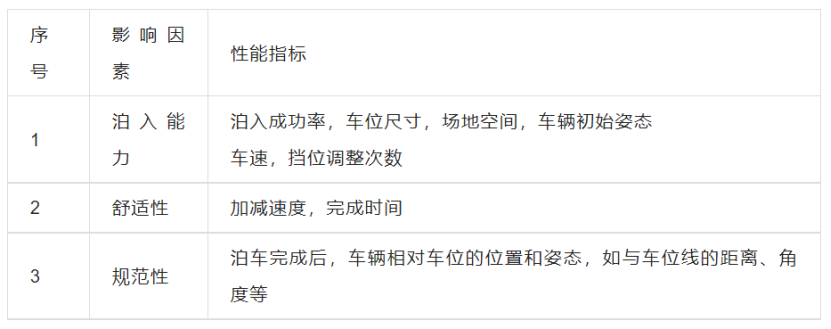
泊入能力是影响泊入体验的首要因素,体现了系统的泊车能力。泊入能力的指标包括成功率、可泊入的车位尺寸范围、车速范围等,需要综合考虑车辆状态参数和车位参数等。
舒适性同样是重要的影响因素。对于驾驶员在车上的自动泊车系统,舒适性直接影响了用户的体验。车辆在泊车过程中的加减速度和系统完成泊车的时间等指标,可以体现舒适性。
泊车的规范性是另一项影响因素,停放规范整齐的车辆,会增加用户的好感和信任。是否停放端正、位置是否居中、与车位线或相邻车辆的距离如何,都反映了系统泊车的规范性。
3.4 泊车功能与场景
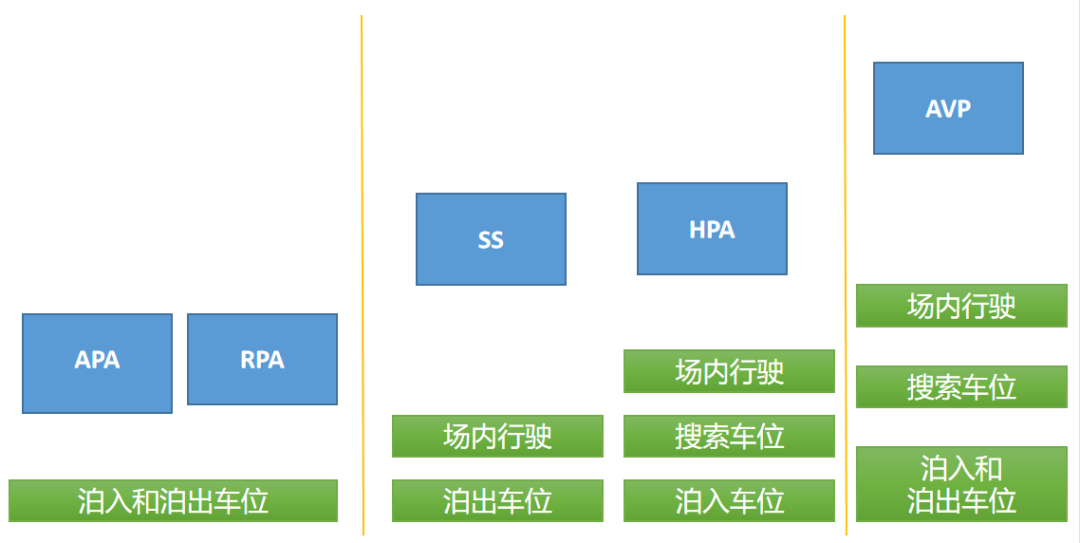
泊车功能包括L2级别的APA、RPA,L3级别的SS、HPA,L4级别的AVP。
资料来源:九章智驾
AVP作为泊车功能的终极解决方案,属于L4功能,是所有泊车功能的集大成者,其作用区域覆盖了从车主下车,到车辆泊入的全过程,以及相反的召唤全过程。AVP的应用场景是前文提到的所有泊车场景的叠加,包括停车场内行驶、搜索车位、泊入和泊出车位。AVP功能需要全面关注泊车全部场景下的用户体验和性能指标。另外,由于AVP功能开启时,用户已经离开车辆,因此高安全性,也是至关重要的,需要有足够的安全冗余设计。
04AVP落地难,该如何解决?
与目前已经量产的自动泊车功能相比,AVP是更高级别的自动泊车,可以认为:当前的自动泊车是AVP的基础。
虽然从目前行业内的动态来看,大家都在为AVP的量产落地而努力着,然而AVP 距离完全落地还有一段较长的路要走。作为点到点的自动出行中较为关键的起点和终点阶段,AVP将是各路玩家的必争之地。
如今“高精地图成为主机厂通往自动驾驶必经之路”的观点已在市场中成为共识,AVP作为自动驾驶自动泊车的重要一环,也同样如此。晶众地图在2020年提出这样的想法:“出行的本质应触及人的最终需求,导航应基于端点到端点——从人的出发点,到停车入库,而不是把车开到某个建筑物再去找停车位。”现在已成为了现实。
晶众AVP高精度地图HD-Parking是一款应用适用于AVP的停车场高精度地图数据产品,包含停车场高精度地图数据、地图引擎,并提供OTA服务。基于此,在与头部合资品牌主机厂的合作中,晶众地图成功实现了从车位预约、室外导航到停车场内导航自动切换,服务同时覆盖停车位自动记录、反向寻车等一系列功能点,从而形成停车全场景高精度服务闭环。
晶众地图分两块同步前进:第一块将最先实现网联化产品的量产,也就是T3停车助手的量产;第二块,在自动驾驶AVP领域,作为高精地图供应商,具备了服务方案商的配套能力。
“T3停车导航(车机版)”是一款车载停车应用产品,解决用户驾车出行最后一公里的停车难题。基于停车场高精度地图,融合停车场动态信息,实现直接导航到停车场的具体车位。当车辆接近停车场时,导航系统会自动切换至停车场地图并进行详细导航,这对于大型商超、医院、交通枢纽等复杂停车场景下的帮助非常可观。本产品包含停车场搜索、车位查询、车位级导航、充电桩搜索、位置信息分享、反向寻车、VIP车位预约、缴费等功能。

产品定位
晶众地图通过全面考虑功能与场景的关联,基于功能规划和应用场景,将用户体验全程纳入开发过程。T3停车导航(车机版)在问世后不断更新改进,具备了以下特点:
1)停车场高精度地图同时应用到移动端&车机端
2)帮助车主随时掌握车辆位置(自动记录车辆停放位置并同步到移动端)
3)一键导航至停车场出口、反向寻车
4)分享车辆位置信息给好友或者代驾
5)不需要外接任何设备,成本低

产品应用场景
现在,全球汽车已经迎来“新四化”时代,电动化、智能化成为车企竞相追捧的新热点。自动驾驶技术作为汽车智能化的宏伟愿景,自动泊车是其重要一环。让创新科技赋能智慧生活,在汽车智能化新征程上,晶众地图将持续发力,赋能合作伙伴,共同推动出行新时代的到来!
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。