1前言
驱动电机作为电动汽车的核心部件之一,在汽车电动化变革的浪潮下,其设计水平得到了显著的提高。在《中国制造2025重点领域技术路线图》中提到了国内驱动电机的发展目标:2020年、2025年和2030年乘用车20秒有效比功率要分别达到3.5、4和5kW/kg以上,商用车30秒有效比扭矩要分别达到18、19和20N·m/kg以上。在严苛目标的指引下,各种电机方案在被陆续尝试。
在当下各主流车企采用的驱动电机方案中,均采用旋转变压器(后简称旋变)作为电机位置传感器。通过对比霍尔传感器与旋变得出下表:
表1.1霍尔传感器与旋变参数对比
| 项目 | 单位 | 霍尔 | 旋变 |
| 成本 | ¥ | 5 | 80 |
| 精度 | ′ | 15-30 | 5-15 |
| 体积 | / | 小 | 大 |
| 工作温度范围 | ℃ | -40-150 | -55-155 |
| 传感器新品开发周期 | / | 短 | 长 |
| 电驱动程序适配 | / | 难 | 易 |
通过对比可看出,霍尔在成本和体积上有明显优势,在合适工况下,霍尔是一种更优于旋变的选择,综上,本文介绍了一种通用的霍尔设计方法。
2霍尔元器件介绍
霍尔芯片基于霍尔效应制作,在元器件中有一块霍尔效应板,元器件功能框图如下:
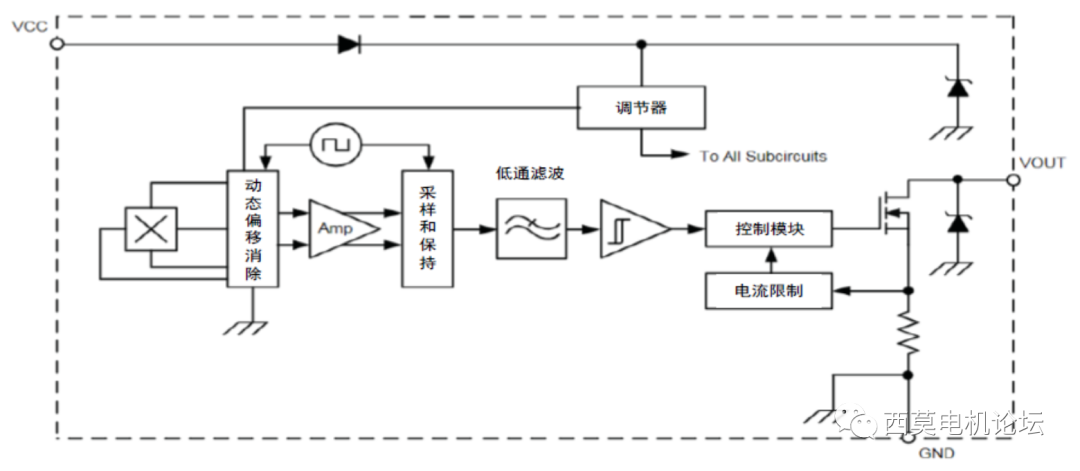
图2.1霍尔元器件功能框图
当霍尔效应板检测到不同磁场时,能够输出不同电信号。通常芯片在输出信号时,输出电压信号与磁场极性有迟滞关系。如下图所示:

图2.2霍尔元器件输出特性
同一型号霍尔元器件一般分为南极款芯片与北极款芯片,两款芯片分别在识别对应极性时输出高电平,检测到另一极性时输出低电平。
芯片的输出电压取决于芯片的供电电压,有常用芯片能够做到3-24V输出可调。该选型取决于控制器控制板所给定的电源电压及检测引脚能够承受的电压。一般来说电压越高抗干扰能力越强。
霍尔元器件的外围电路简洁,传感器电路板上无需布置过多元器件,这对小体积应用非常友好。通常在外围电路中仅需要上拉电阻及滤波电容即可。其典型外围电路如下图所示:
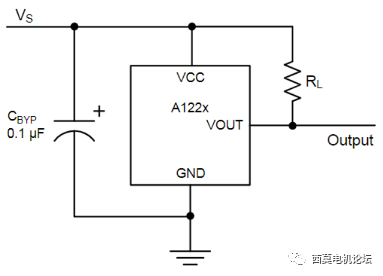
图2.3霍尔元器件典型外围电路
对于同一款霍尔,在不同工况下需选择不同耐温或者不同封装来匹配具体的应用环境,芯片厂商往往能够提供多种耐温规格及多种封装形式的芯片供设计师选择。
对于不同极数、不同最高转速的电机,需要计算出反电势最高频率,并在选型时选择大于该频率的芯片。
霍尔在选型时还有一项重要参数---霍尔跳变阈值(单位Gs),即霍尔检测到多强的磁场产生跳变,该值的选择会直接影响到测试结果,主要影响霍尔检测精度,选择过大或者过小的跳变阈值都会产生霍尔跳变沿与反电势换向点不统一的问题。而换相点不统一会导致控制器换相超前或滞后于反电势换相,影响电机输出能力。
表2.1 A122X霍尔选型表

3行业典型应用
霍尔传感器由于其小体积、低成本的优势常被应用于电动两轮车、电动三轮车、老年代步车等机动车的动力总成。该类型产品都有价格低、销量高的特点,电机可以通过缩小传感器所占用的空间,来降低电机壳体重量,同时由于其价格优势较大,能够有效降低动力总成价格,所以在上述价格敏感产品中有着广泛的应用。
3.1轮毂电机
下图为霍尔传感器在摩托车轮毂电机中的典型应用,在该应用中仅使用“PCB板+霍尔元器件+线”的形式就完成了完整霍尔传感器的设计。霍尔元器件使用定子铁芯开槽的方式进行安装固定。从轴向尺寸上观察,传感器整体高度在8mm以内,若取端部绕组过桥线处最高点到传感器最高点的距离,该距离可小于5mm,即在端部绕组上增加5mm高度即可完成霍尔传感器的安装,充分体现了霍尔传感器小体积的优势。

图3.1轮毂电机实物图
3.2两轮燃油车
在两轮燃油车领域,随着法规对排放的要求提高,两轮车自动启停技术的到了重视,与摩托车发动机曲轴直连的发电机成为了改造对象,通过增加霍尔传感器,实现对发电机的控制,能将发电机用作启动电机,是当前两轮车发展的趋势之一。
如下图所示的电机即为改装后的发电机,图示位置为霍尔传感器,该方案设计有外骨架进行霍尔安装,内部使用贴片式霍尔,在霍尔组装完成后进行灌封,霍尔总成的稳定性得到较大提升。
4霍尔设计
通过上述典型案例分析,可将霍尔安装方式分为“有骨架”和“无骨架”两类。对比两类霍尔传感器可得出下表:
表4.1有骨架霍尔与无骨架霍尔对比
| 项目 | 单位 | 有骨架 | 无骨架 |
| 轴向高度(高于绕组部分) | mm | 13-18 | 5-8 |
| 定子铁芯预留安装位置(轴向) | mm | 10 | 5 |
| 定子铁芯预留安装位置(径向) | mm | 5 | 2 |
| 定子铁芯预留安装位置(弧长) | mm | 8 | 5 |
| 结构 | / | 霍尔传感器、线、PCB板、骨架、灌封料 | 霍尔传感器、线、PCB板 |
通过对比可知有骨架型霍尔在体积和结构复杂程度上都高于无骨架霍尔。本节将会以有骨架霍尔为例,讲解霍尔传感器设计方法。
4.1霍尔插槽的选择
霍尔插槽,即霍尔安装位置,一般该位置可位于齿中心或槽中心,两者均可准确反应磁场变化情况。不论是齿中心还是槽中心,均需要按照电机所选择的槽极配合来选择在哪一槽(齿)安装霍尔元器件,当三个元器件安装完成后能够以60°或120°相位角进行输出即为正常。对于60°与120°的选择,需要以控制器程序为准,采用不同的角度,输出信号也不同,如下表所示
表4.2 120°分布情况下霍尔输出情况

表4.3 60°分布情况下霍尔输出情况

大部分控制器厂商均以120°分布的输出信号来编写程序,若采用60°则需要重新调试程序,建议以120°分布作为设计值。
当确定好电角度设计值之后,就需要确定机械角度,来决定安装的具体槽(齿),以一对极电机为例:

图4.1 120°分布霍尔安装位置示意图

图4.2 60°分布霍尔安装位置示意图
通过图片可以看出,对于一对极电机,电角度120°分布,机械角度就需要120°分布;电角度60°分布,机械角度就需要60°分布。
当电机极数增多时,霍尔布置的机械角度就会随之缩小,例如四对极电机采用120°分布,则霍尔安装的机械角度等于120/4=30°。计算过程如下:

再以典型的8极48槽电机为例:
1若选择的电角度分布为120°,则霍尔安装机械角度需间隔30°。 2考虑到电机槽数为48,每槽所占机械角度为7.5°。 3确定每4槽(齿)安装一个霍尔传感器即可。如下图所示。
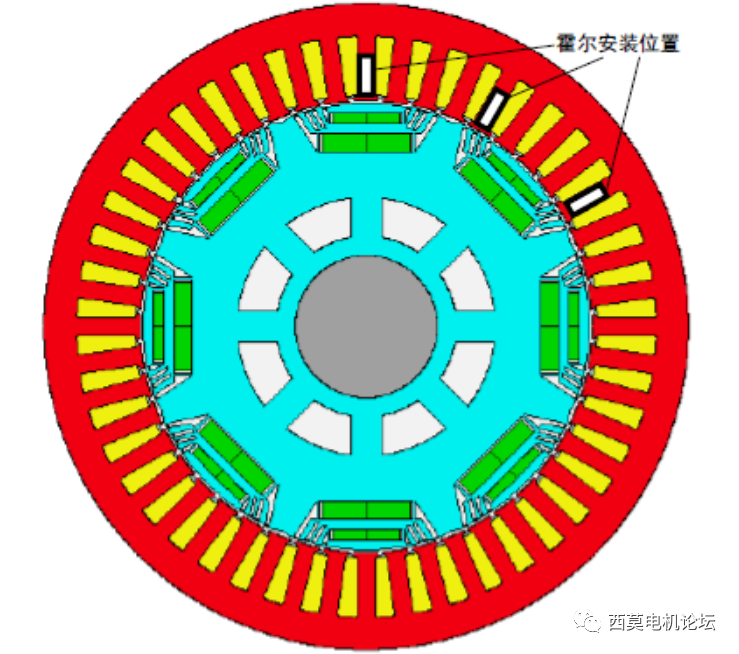
图4.3 8极48槽电机120°分布霍尔安装示意图
通过上述步骤计算,即可确定各霍尔安装位置,对于不同槽极配合的电机也可通过相同的方法确定。第一步确定霍尔电角度分布,第二步确定霍尔机械角度分布,第三步计算需要间隔多少槽安装霍尔传感器。
4.2霍尔径向位置的选择
在确定霍尔插槽位置后,需要确定霍尔在径向上所处的位置,即确定霍尔检测到磁场的具体位置。该位置的选择直接影响霍尔跳变的精度,即跳变沿是否会超前或滞后于换向点。如下图所示:
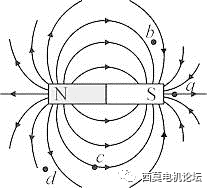
图4.4 磁铁磁力线分布图
通过上图可以看出,离磁铁越远的位置磁力线越稀疏,即磁场强度越弱,离磁铁越近的位置磁力线越密,即磁场强度越强。根据前述的霍尔原理,当检测到磁场强度高于或者低于阈值时,霍尔信号发生跳变,所以选择检测的具体位置即是选择霍尔跳变的电角度。
在考虑该距离时需要对转子磁场的分布情况进行仿真或测量,同时需要考虑霍尔安装位置是否会对铁芯产生影响,是否会对装配造成不便。下面以8极48槽电机为例,来确定霍尔径向检测位置:

图4.5 8极48槽电机磁密分布 1 定子绕组在经过Q轴时会产生不同向电势(反电势过零点),所以霍尔需要检测是否经过Q轴,遂取Q轴磁场进行分析。 2 通过对计算出的磁场强度进行测量,可以得出在图示测量点处磁场强度为80Gs

图4.6 Q轴放大图
3 查阅芯片资料后选取跳变阈值为80Gs芯片作为霍尔芯片,封装选择插件形式。
4 确认霍尔检测点位置是否与第二步中挑选的位置相同,如下图所示,图中“E”点位置即为霍尔检测点,其到霍尔元器件表面位置约为0.5mm。

图4.7 封装尺寸图
5 “E”点到表面位置与测量点距定子内径距离相同,可以选择该封装霍尔传感器使用,设计时使器件表面与定子内表面在同一平面即可。
4.3霍尔轴向位置的选择
在选定霍尔安装槽及径向位置后,需要确认霍尔轴向的安装位置,即深入定子铁芯的距离。通过上一小节的封装尺寸图可以看出,霍尔检测点距霍尔上端面有1.44mm的距离,轴向位置的基础要求是转子磁场能够包裹霍尔检测点,所以霍尔至少需要深入定子铁芯1.44mm以上,对于一般设计来说,将整个霍尔元器件插入定子铁芯较为合理,所以在设计时元器件下表面一般低于铁芯端面1mm,如下图所示:

图4.8 霍尔轴向安装位置示意图
4.4 霍尔定位的选择
霍尔定位方式视具体情况而定,对于定位较差的霍尔,可能会出现以下问题:
1 霍尔信号不变,不能随磁场变化做出跳变。
2 霍尔信号跳变沿与反电势过零点的电角度差过大。
3 霍尔信号占空比不准确,不是精确的50%占空比。
4 两相霍尔信号之间的电角度差值与设计值不符。
出现以上问题的原因均有可能是因为霍尔元器件外表面法线与电机径向不平行。所以在设计定位方式时需要以“霍尔元器件外表面法线与电机径向平行”为目标。
定位方式一般分为两种,一种是骨架定位,一种是铁芯开槽定位。
4.4.1 铁芯开槽定位:
铁芯开槽定位(前文轮毂电机方案)需要在定子冲片上单独冲压出霍尔安装槽,使用冲片的精度保证霍尔安装的精度,由于量产铁芯在冲压模具上能够保证非常小的尺寸公差,所以该方案在霍尔信号精度上较为可靠,但由于霍尔元器件裸露在电机箱体内,对电机箱体的密封性提出了较高要求,需要在电机全寿命周期内保证箱体不进水、泥、沙等杂质,否则很容易对电机传感器造成损伤。

图4.9 铁芯开槽定位示意图
4.4.2 骨架定位:
在定子铁芯工作环境不稳定的情况下,一般选择使用霍尔骨架定位,例如电机运行过程中有泥沙进入、电机所处箱体内有其他旋转部件、工作环境中金属杂质较多等情况,使用带骨架的霍尔能够保证没有裸露出的导电体,线束也能够按照骨架限制的方向引出,有着优秀的装配一致性。

图4.10某霍尔传感器反面视图

图4.11某霍尔传感器正面视图
骨架定位形式主要结构如下图所示:

图4.12 骨架主要结构图
骨架的主要定位方式如下:
1 霍尔骨架齿部外表面与定子铁芯槽开口处配合,该配合需要槽开口在冲制时留出足够的宽度,骨架齿部外表面设计形状与该槽开口相配合,配合后使得骨架齿部外表面不超过定子铁芯外表面,同时保证装配后骨架不松动。
2 霍尔传感器通过骨架齿部内的霍尔插槽进行定位,插槽形状应与霍尔元器件的封装形式相同,并且确保霍尔元器件外表面法线与电机径向平行。
3 通过螺栓与定子铁芯进行固定,确保轴向不发生窜动。
5霍尔传感器的测试方法
本文仅介绍霍尔传感器的精度测试方法。所谓霍尔精度,即霍尔传感器跳变沿与反电势对应点的相位差,相位差越接近0代表霍尔精度越高。
测试准备
在前期准备时,按照电机反电势测量的标准准备实验设备即可,以下默认电机能够正常匀速旋转,实验室有示波器一台。电机三相记作ABC,霍尔三相记作UVW,电机及霍尔各相一一对应,即A-U、B-V、C-W。
测试项次
1 三相霍尔信号
2 各相霍尔信号精度
三相霍尔信号
使用三个示波器探头分别测量霍尔三相输出线,记录下霍尔波形,测量以下参数:
表5.1记录参数表
| 记录参数 | 参数作用 |
| 一个机械周期所对应的霍尔信号波形 | 观察霍尔信号编码顺序是否与设计值相同 观察各相各电周期中占空比是否为50% |
| U相上升沿与V相上升沿的时间差 | 将该时间差换算成电角度,观察是否满足设计要求 |
| V相上升沿与W相上升沿的时间差 | 将该时间差换算成电角度,观察是否满足设计要求 |
| W相上升沿与U相上升沿的时间差 | 将该时间差换算成电角度,观察是否满足设计要求 |
标准波形如下图所示:
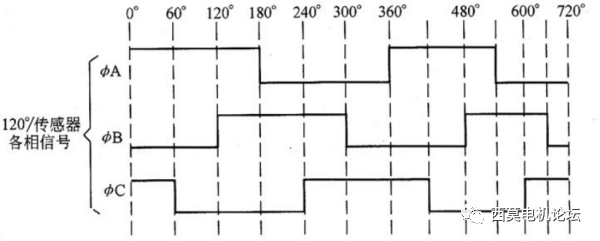
图5.1 典型120°霍尔测试波形
时间差换算电角度公式如下:

各相霍尔精度测试
在进行该项测试时,示波器最好选用隔离示波器,若不使用隔离示波器则可能会有高压反电势与低压霍尔信号之间产生干扰的风险,影响测量精度。
示波器通道1接引出线AB,测量线反电势,通道2接U相,测量线反电势的过零点与U相上升沿、线反电势的过零点与U相下降沿的时间差,换算成电角度后观察是否满足前期设计要求。其余两相可按照相同方法进行测量,单位可以是时间也可以是电角度,测量完成后记录成如下表格:
表5.2 测试结果记录表
| 接线 | 测量点 | 周期1 | 周期2 | 周期3 | 周期4 | 周期n |
| AB-U | 上升沿 | |||||
| 下降沿 | ||||||
| BC-V | 上升沿 | |||||
| 下降沿 | ||||||
| CA-W | 上升沿 | |||||
| 下降沿 |
若实验条件足够,可进行多通道同时测量,则可以在电机ABC各相上连接一颗电阻,电阻应大于10K,将三颗电阻另一端连接在一块,形成一个“Y”形回路,此时测量的三相反电势即为相反电势。霍尔跳变沿应与两相之间的交点相对应,测试记录表格与上表相同,标准测试波形如下图所示:

图5.2 典型6通道测试波形
6霍尔测试时常见的波形问题
以8极48槽电机为例,当电机处于9000rpm时,反电势频率为600Hz,霍尔频率为600Hz,为方便讲解,使用单相反电势与霍尔波形测试结果作为示例,其中红色信号为霍尔波形,蓝色信号为反电势波形,根据4.4所述的问题,分别列出其典型波形图如下:
1 正常波形如下图所示:

2 霍尔信号不变,不能随磁场变化做出跳变。

3 霍尔信号跳变沿与反电势过零点的电角度差过大。

由图可看出霍尔电信号均超前与反电势波形,测量点1为霍尔跳变点,测量点2为反电势过零点,测量点1、2之间时间差为96us。通过5.1中所示公式计算可得,当前电角度差为(96/1666)*360=20.7°。 4 霍尔信号占空比不准确,不是精确的50%占空比。

5 两相霍尔信号之间的电角度差值与设计值不符。

由图可看出,红色相与蓝色相有120°的电角度差,绿色相与蓝色相电角度差不为120°,所以绿色相存在电角度分布不正确的问题。
7总结
随着电动车的愈发普及,电车市场不断增长,势必会带动下沉市场产品油转电升级,在可预见的将来,该市场产品对霍尔方案的尝试会逐步增多。通过本文所述的设计方法,能够从元器件选型、霍尔检测位置、定位方式选择等几个方面完成一种稳定的霍尔传感器设计。









