EtherCAT运动控制:RTSys对控制器的监控与设置原理
前面两节课程我们分别介绍了全国产EtherCAT运动控制边缘控制器ZMC432H的硬件接口和正运动API函数封装原理以及自定义API封装例程。
本节内容主要包括以下几个部分:RTSys的简介/安装/在线升级、ZMC432H与RTSys的开发诊断、RTSys对控制器的监控与设置以及RTSys插件说明。
01
功能简介
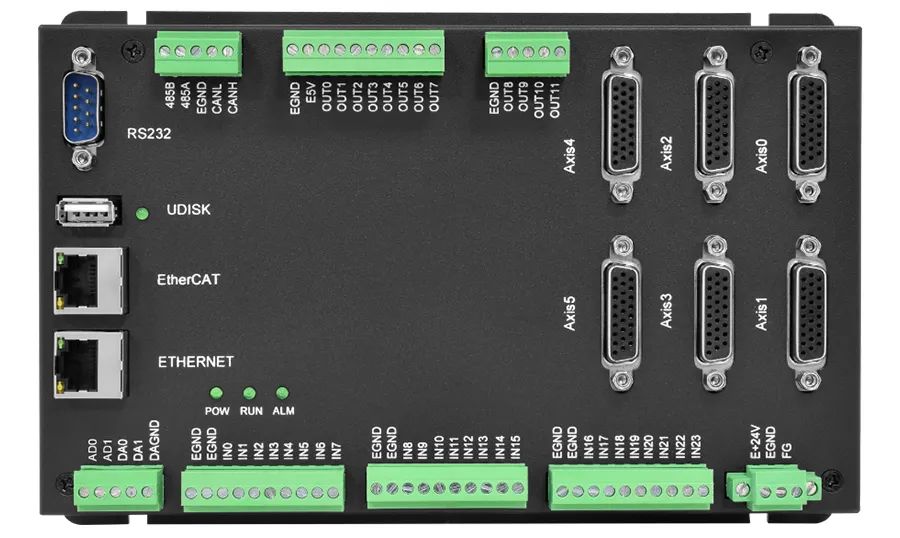
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程HMI功能,能提供网络组态显示,可实时监控和调整参数配置。
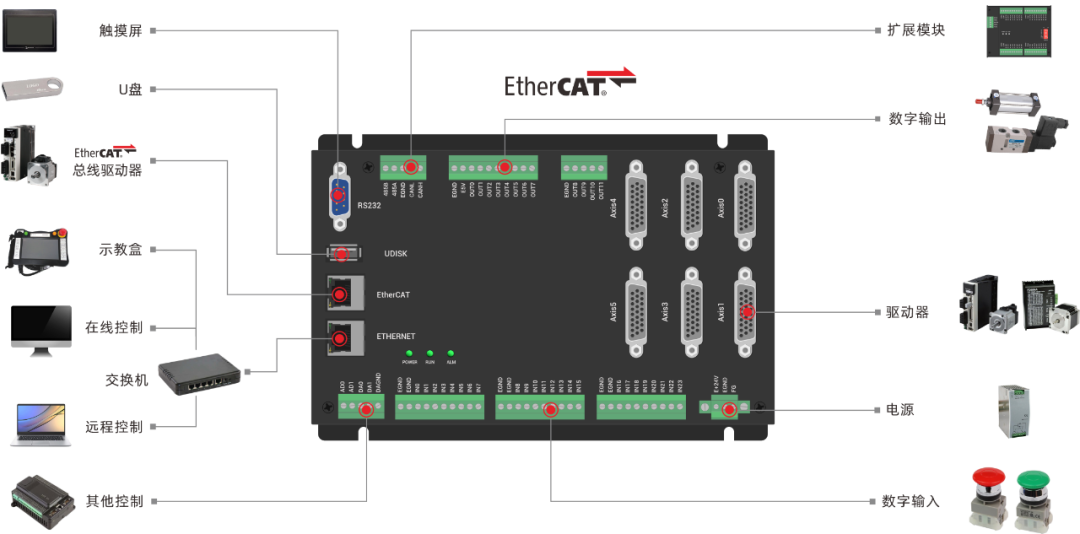
ZMC432H具备丰富的硬件接口和控制功能模块,能实现高效稳定的运动控制和实时数据采集,以满足工业控制协同工业互联网的应用需求。
ZMC432H内置了Linux系统,可以使用本地的LOCAL接口进行连接,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间为40us左右。
ZMC432H视频介绍:
02
RTSys简介
RTSys是正运动推出的集成运动控制+机器视觉功能的开发软件,支持RTBasic、RTPlc梯形图、RTHmi、RTVision机器视觉等二次开发,并可混合编程、实时仿真、在线跟踪以及诊断与调试,快速实现智能装备的视觉定位、测量、识别、检测和复杂的运动控制等系统的开发,RTSys软件开发界面如下图所示。
用户可通过串口或网口连接PC与控制器,使用RTSys软件编写的程序可以直接下载到正运动控制器里脱机运行,也可以在PC平台仿真运行。
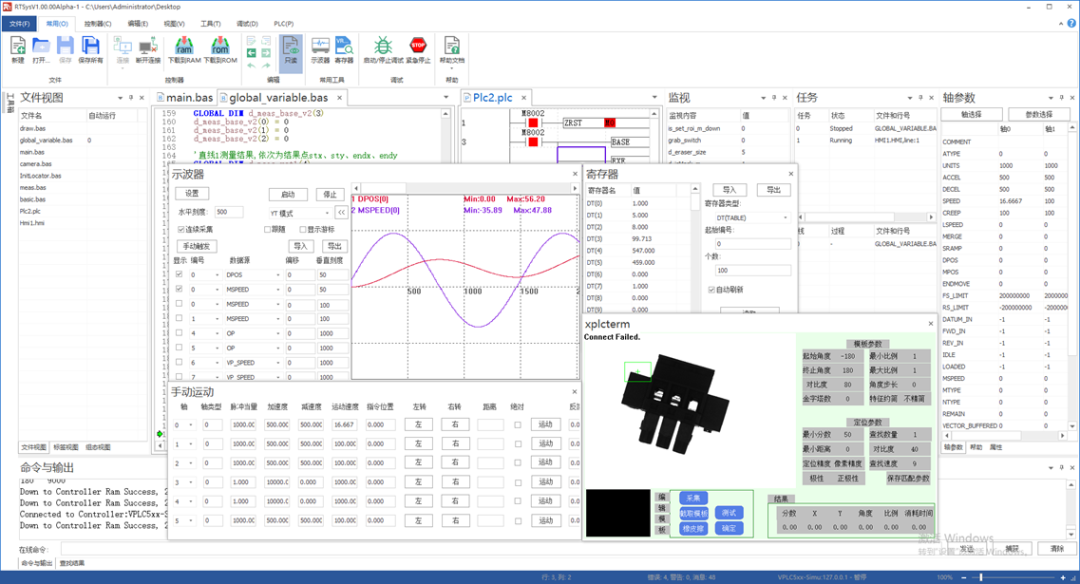
RTSys软件支持三种编程方式:Basic、PLC梯形图、HMI组态。 使用RTSys进行Basic语言编程开发的优势在于:支持多个Basic任务运行;若使用PLC梯形图开发则支持一个PLC任务运行;若使用HMI组态编程开发则支持两个HMI任务运行。Basic任务、PLC梯形图任务和HMI组态任务之间可以多任务运行。
RTSys软件支持在线仿真调试,自带仿真器ZMC Simulator和组态程序仿真工具xplc screen。
RTSys不支持向下兼容,在RTSys创建的项目不建议在ZDevelop中打开!
使用RTSys软件需要控制器固件支持才可使用!
1、系统要求
要使用RTSys软件,硬件要求如下:
| 项目 | 最小要求 | 推荐使用 |
| CPU | Pentium级别处理器,主频1GHz | intel i5级别处理器,主频2.9GHz |
| 内存大小 | 1GB | 4GB |
| 硬盘剩余空间 | 1GB | 4GB |
| 操作系统 | Windows7 | Windows10 |
| 显示器 | 1024x768/24位真彩色 | 1920x1080/8位RGB |
| 通讯接口 | RS232串行口 | RS232串行口/USB/以太网口(可以通过HUB转接) |
2、RTSys安装步骤
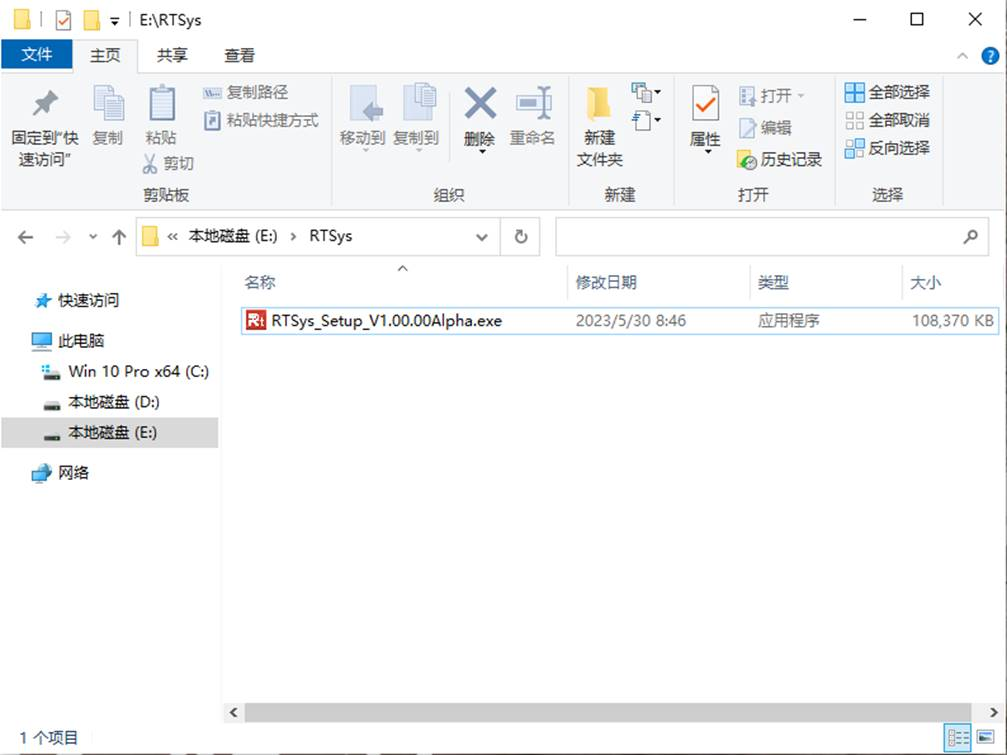
1.从正运动技术官网获取RTSys软件安装包,存放至目标路径下(用户自行选择路径)。将安装包解压后,得到如下图所示的.exe应用程序。
注:下图版本号不一定固定,软件版本号会随软件更新而更新。从正运动技术官网下载最新版的即可。
2.鼠标双击打开该.exe应用程序。弹出如下窗口,点击“下一步”。
3.点击“浏览”选择软件安装路径。确定安装路径后点击“确定”,并点击“下一步”。
4.点击“安装”即可开始安装软件。右图即正在安装。

5.安装成功则弹出如下窗口,点击“完成”即可。
3、RTSys的在线升级
RTSys软件支持在线升级更新。检查RTSys软件是否有更新版本,有以下两种方法。 方法一:有版本更新时,打开RTSys软件时会自动弹出更新提示窗口,用户可自行选择是否更新。操作方法如下: 1.需要更新时点击“立即更新”,弹出窗口显示更新内容。若点击“不再提醒”,则再次打开RTSys软件时将不再提示当前新版本的更新。
2.点击“下一步”,即可开始更新。更新完毕后弹出安装窗口,按本节上述安装步骤进行操作即可。

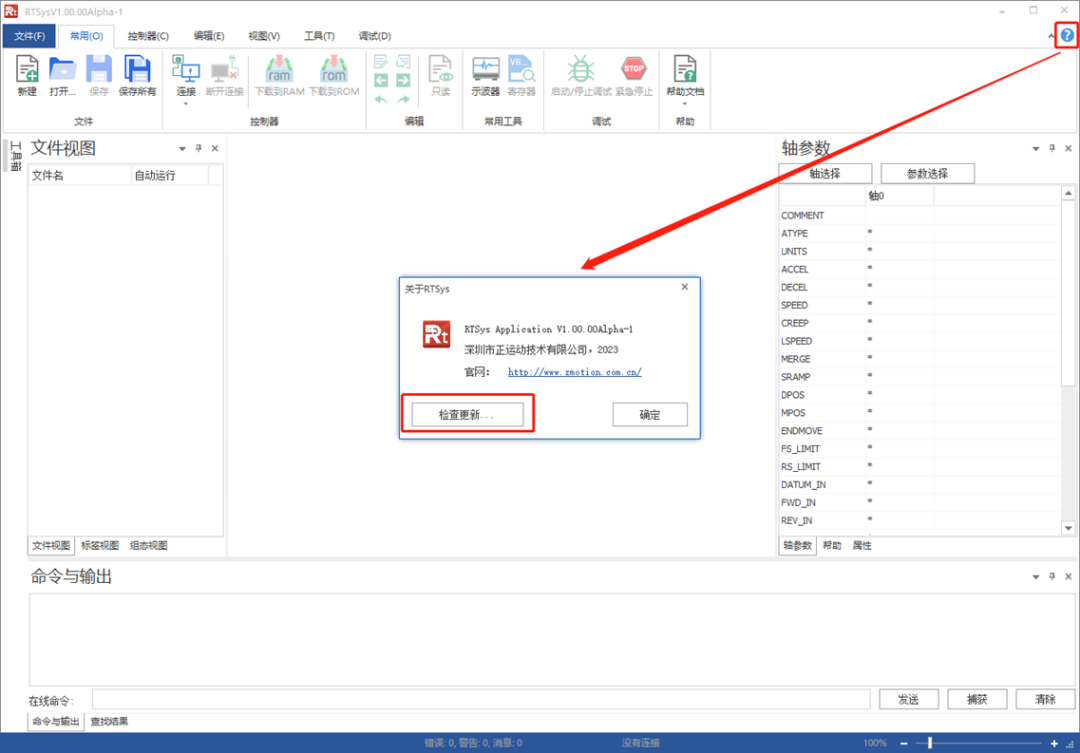
方法二:通过“关于RTSys”可以查看版本更新及正运动技术官网等相关信息。操作方法如下:
1.点击软件界面右上角的“ ”即可弹出如下窗口,点击“检查更新…”。
”即可弹出如下窗口,点击“检查更新…”。
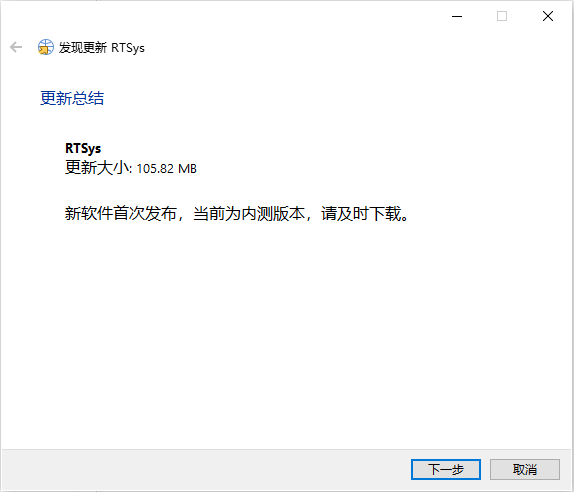
2.若当前版本已是最新版本则弹窗提示无需更新,如下左图所示。若有新版本可更新,则弹出如下右图的窗口,更新则与上述方法一致。

03
ZMC432H与RTSys的开发诊断
一、ZMC432H与RTSys的连接
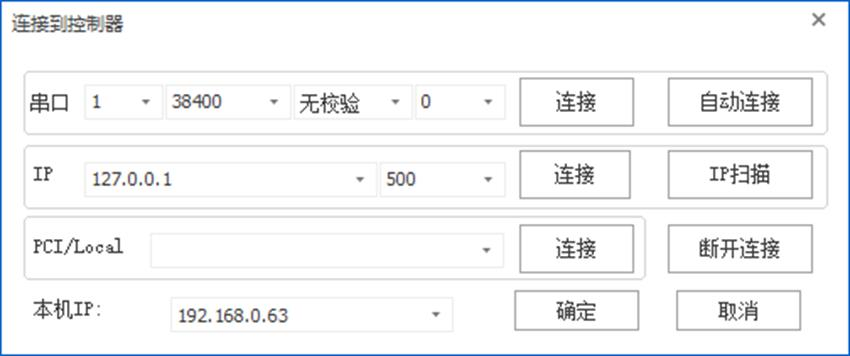
通过“控制器”→“连接”→“控制器”菜单,可以连接到控制器。RTSys支持串口和以太网口以及PCI/Local连接到控制器。
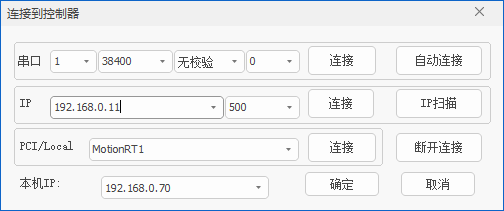
串口参数:串口编号,波特率,是否校验,串口ID(填0即可)。
IP:控制器IP地址,控制器出厂IP为192.168.0.11,后期用户可自行修改。
PCI/Local:PCI卡号或连接MotionRT7。
二、RtSys对控制器的常用操作
1、修改IP地址 RTSys支持修改控制器IP地址,可通过菜单栏“修改IP地址”功能修改,或使用在线命令IP_ADDRESS修改。
修改控制器IP地址需先使RTSys连接上控制器,可通过串口或网口等连接方式实现。
(1)菜单栏“修改IP地址”功能 连接好控制器后,在菜单栏“控制器”→“修改IP地址”,弹出如下窗口,此时会显示当前控制器IP,在窗口可直接输入新的IP地址。
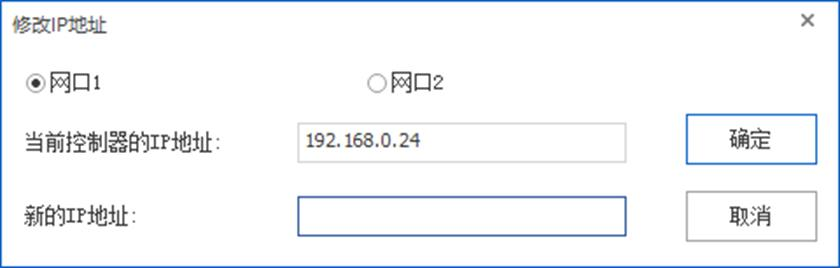
修改IP后,控制器与RTSys的连接会断开,等待响应后再次选择新设置的IP地址连接即可。
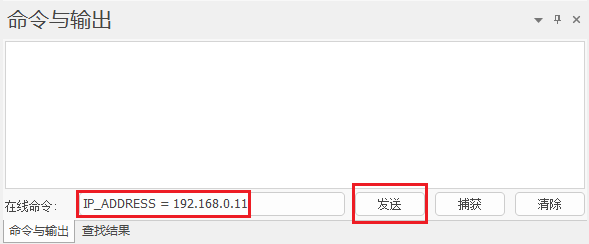
(2)在线命令修改控制器IP 连接好控制器后,在[命令与输出]窗口“在线命令”栏输入指令:IP_ADDRESS = dot.dot.dot.dot,即写入要修改的IP地址。点击“发送”后,控制器会断开连接,等待响应后再次选择新设置的IP地址连接即可。
2、固件升级
固件升级用于对控制器现有固件版本更新,当前固件版本若无法满足程序运行要求,或部分指令功能不支持,就需要对固件进行升级。
固件升级有两种方法:一种是使用RTSys软件自带的固件升级功能,另一种是采用zfirmdown工具软件下载zfm固件包,进行固件升级。
两种升级操作方法类似,以下为RTSys软件固件升级操作指引:
(1)先下载好需要升级的固件,将固件文件存放至电脑的任意路径下;
(2)打开RTSys连接到控制器,连接成功后点击菜单栏“控制器”→“固件升级”后,在弹出的窗口里可查看控制器当前使用的固件版本,可用于对比是否为新固件。若为旧固件,则进行下一步操作:
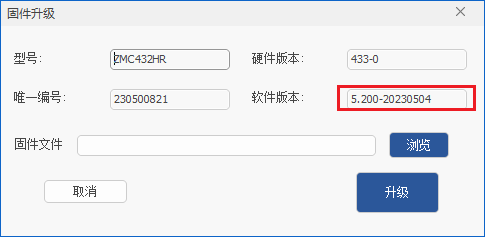
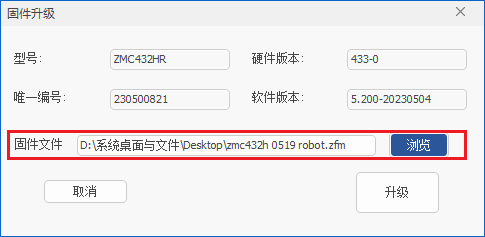
(3)点击“浏览”,按步骤1保存的路径选择目标固件后打开,如下图所示。
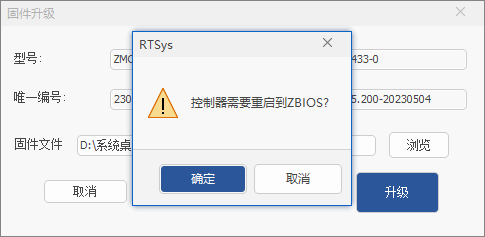
(4)点击“升级”。确认升级之后会提示重启到ZBIOS的对话框,此时控制器需要重新连接。点击“确认”后会弹出“连接到控制器”窗口,选择合适的连接方式重新连接(串口或网口)。
注:升级的固件版本需要与控制器硬件型号一致,否则会报错。
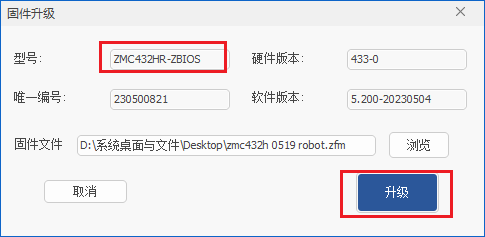
(5)控制器再次连接成功后,弹出“固件升级”界面,系统进入ZBIOS状态,显示型号为“ZMC432HR-ZBIOS”。再次点击“升级”。
(6)弹出以下界面,表示正在下载文件。下载过程中不可中途关闭。

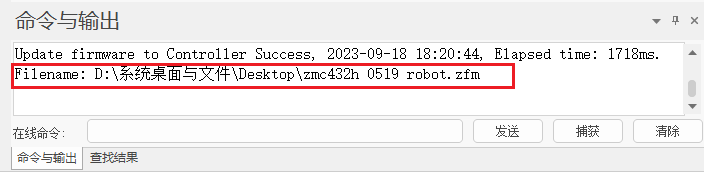
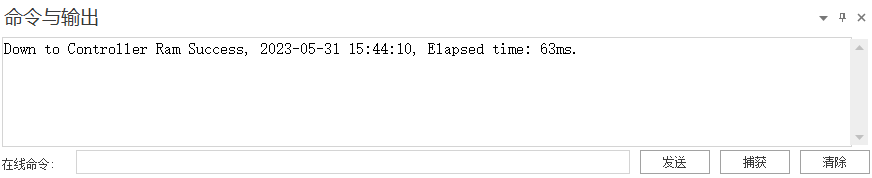
(7)进度条满格后,“固件升级”界面消失,命令与输出窗口显示如下信息,表示固件升级成功。
(8)固件升级成功后,断电5秒以上,最后重新连接控制器、查看控制器状态的固件版本号。
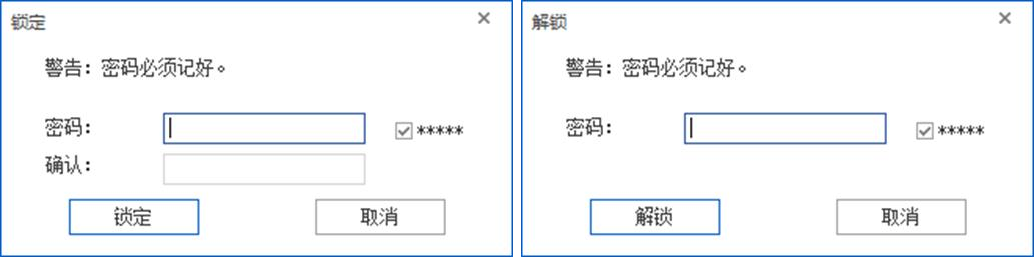
3.锁定/解锁控制器
锁定控制器即通过设置密码将控制器锁定,主要用于保护控制器内下载的程序,锁定之后上位机程序将无法下载到控制器,但生成的ZAR文件仍可下载。解锁控制器则输入正确密码即可解锁。 接线错误时注意事项:
⊙控制器LOCK后将不能进行调试。
⊙密码可设置为数字、字母和特殊符号,长度不超过16个字符。
⊙密码采用不可逆算法加密,一旦忘记,将无法知晓。
⊙操作路径:菜单栏“控制器”→“锁定控制器”/“解锁控制器”。
三、RtSys的程序开发和诊断
1、新建工程
在电脑里新建一个文件夹用来保存即将要建立的工程。
1.打开RTSys编程软件,新建项目:菜单栏“文件”→“新建项目”。
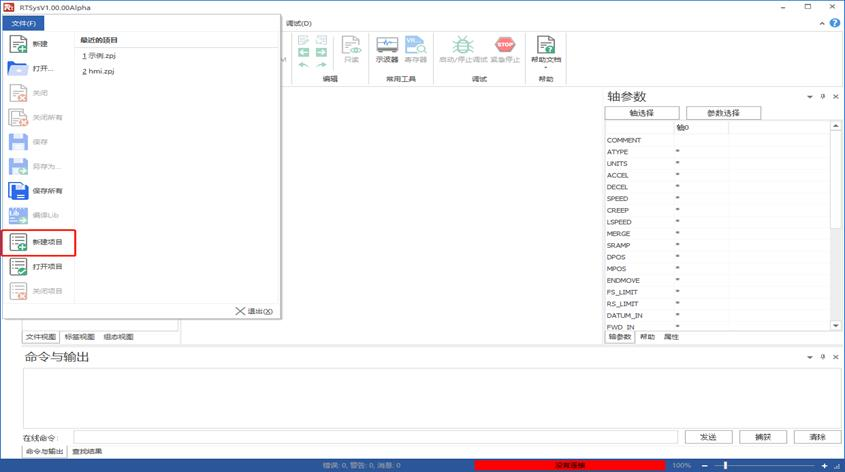
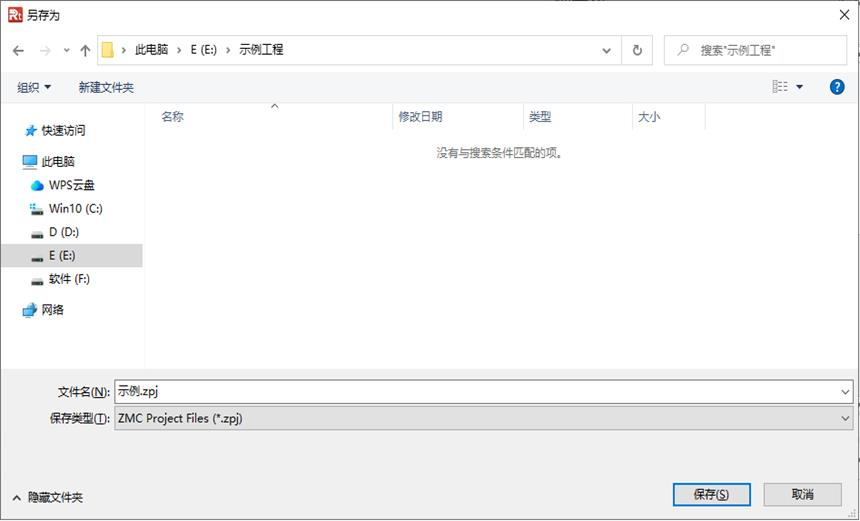
2.点击“新建项目”后弹出“另存为”界面,选择一个文件夹打开,输入文件名后保存项目,后缀为“.zpj”。
3.新建文件,菜单栏“文件”→“新建文件”。
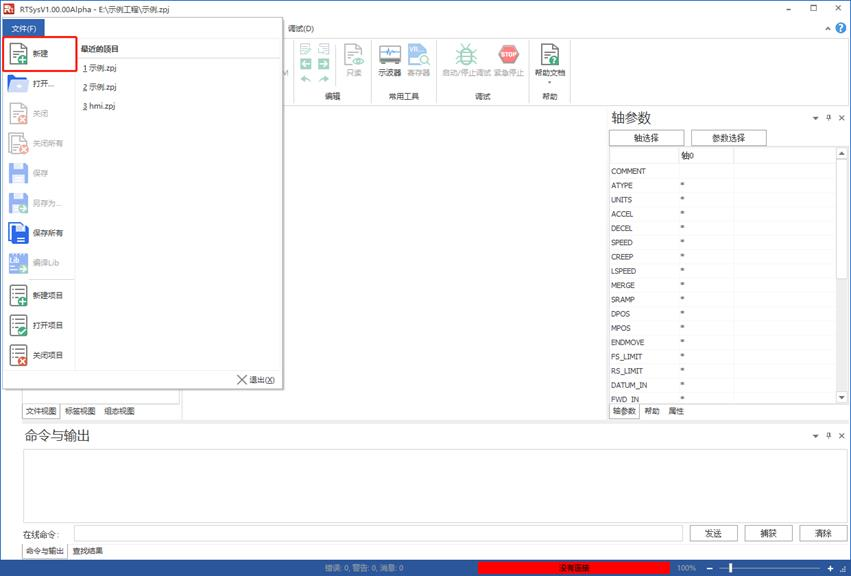
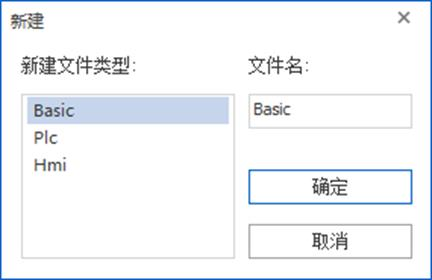
点击“新建文件”后,出现下图所示的弹窗,支持Basic/PLC/HMI混合编程,这里选择新建的文件类型为Basic后确认。
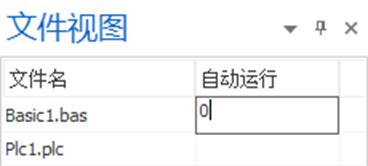
4.设置文件自动运行,如下图,双击文件右边自动运行的位置,输入任务号“0”。
5.编辑程序,程序编写完成,点击保存文件,新建的Basic文件会自动保存到项目zpj所在的文件下。
6.连接到控制器,在程序输入窗口编辑好程序,点击“常用”→“连接”。
没有控制器是可选择连接到仿真器仿真运行,点击“连接”→“连接到仿真器”,便可成功连接到仿真器,并弹出仿真器连接成功提示。

点击“连接”弹出“连接到控制器”窗口,可选择串口连接或网口连接,选择匹配的串口参数或网口IP地址后,点击连接即可。连接成功命令与输出窗口打印信息:Connected to Controller:ZMC432H Version:4.64-20170623.
串口连接和网口连接的详细方法参见RTSys软件菜单栏“常用”“帮助文档”→“RTSys帮助”文档。
7.下载程序,点击菜单栏按钮“下载到RAM”或按钮“下载到ROM”,下载成功命令和输出窗口会有提示,同时程序下载到控制器并自动运行。
RAM下载掉电后程序不保存,ROM下载掉电后程序保存。下载到ROM的程序下次连接上控制器之后程序会自动按照任务号运行。
注意事项: ⊙打开工程项目时,选择打开项目zpj文件,若只打开其中的bas文件,程序无法下载到控制器。
⊙ZMC0系列控制器部分型号不支持下载到RAM。
⊙不建立项目的时候,只有bas文件无法下载到控制器。
⊙自动运行的数字0表示任务编号,以任务0运行程序,任务编号不具备优先级。
⊙若整个工程项目内的文件都不设置任务编号,下载到控制器时,系统提示如下信息WARN: no program set autorun.
2、程序调试
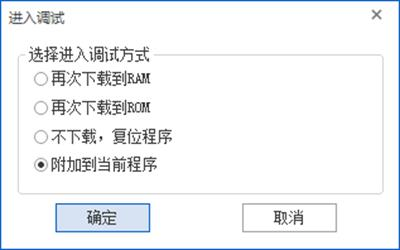
RTSys连接控制器后,从菜单栏选择“调试”-“启动/停止调试”,弹出如下窗口,选择“再次下载到RAM”表示程序再次下载到RAM运行,“再次下载到ROM”表示程序再次下载到ROM运行,“不下载,复位程序”表示不下载程序,仅重新运行之前下载的程序,“附加到当前程序”表示此时程序不下载,仅在窗口显示目前的运行状态。
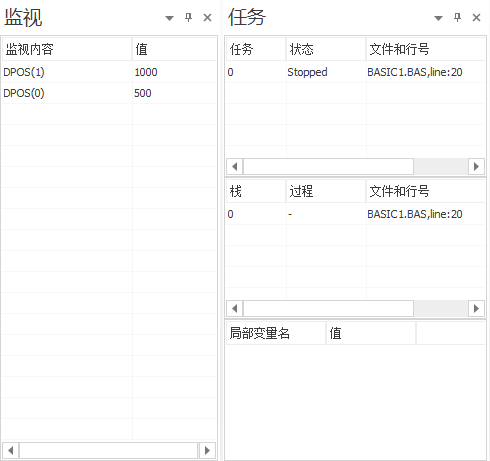
如下图,此时可以查看各任务运行情况、监视内容、子函数堆栈调用过程、子函数局部变量值。
开启调试时,调试工具栏有效。(暂停后方四个按钮仅Basic调试可用)

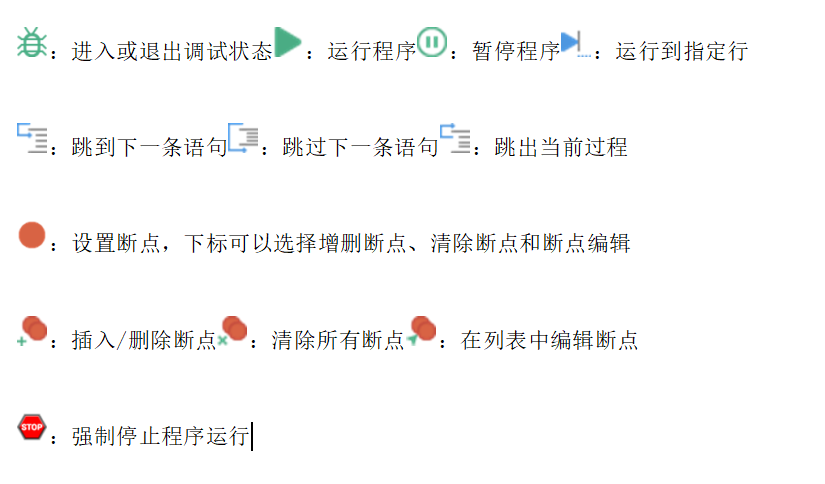
请保证PC程序文件和控制器的程序文件一致,否则可能导致光标位置错误。调试只能在控制器UNLOCK状态时进行程序调试。
断点调试可以查看程序运行的具体过程,主要用于判断程序逻辑错误。配合监视内容和轴参数(参见下一节)变化情况可以查看程序每执行一步对寄存器、变量、数组等的影响。断点快捷键F9添加,或“调试”-“断点”-“增删断点”,断点可以添加多个。
添加断点后,程序运行会停止在断点处,此时断点处对应的指令还没有执行。任务窗口可以查看程序断点停止。
详细使用方法参见RTSys软件“常用”-“帮助文档”-“RTSys帮助”-“程序调试”。
3、示波器使用
示波器属于程序调试与运行中极其重要的一个部分,用于把肉眼看不到的信号转换成图形,便于研究各种信号变化过程。示波器利用控制器内部处理的数据,把数据显示成图形,利用示波器可以显示各种不同的信号,如轴参数、轴状态等。在“工具”→“示波器”中,打开示波器窗口或点击快捷按钮 。
。
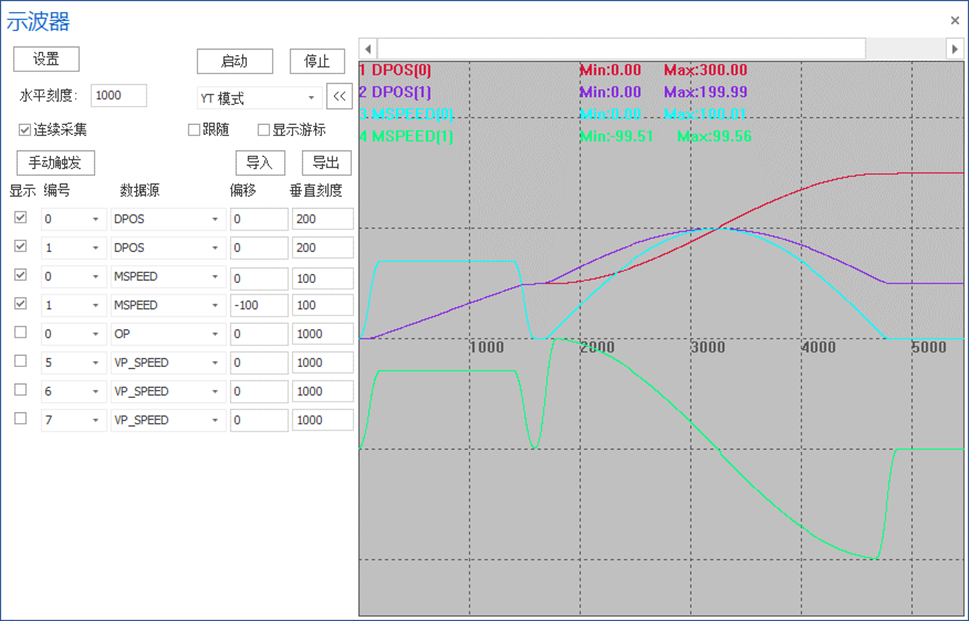
示波器必须先启动后触发才能成功采样。打开示波器,设置好相关参数之后点击“启动”,可手动触发采样,也可在程序里加入“TRIGGER”指令自动触发示波器采样。
示波器基础设置按钮功能:
(1)设置:打开示波器设置窗口,设置示波器相关参数。
(2)启动:启动示波器(但不触发示波器采样)。
(3)停止:停止示波器采样。
(4)XY模式:勾选时切换成XY平面显示两个轴的插补合成轨迹。
(5)<(6)连续采集:不开启连续采集时,到达采样深度后便停止采样,开启了连续采集之后示波器会持续采样。
(7)跟随:开启跟随后,横轴自动移动到实时采样处,跟随波形显示。
(8)显示:选择当前通道曲线是否显示。
(9)手动触发:手动触发示波器采样按钮(自动触发使用TRIGGER指令)。
(10)编号:选择需要采集的数据源编号,如:轴号、数字量IO编号、模拟量IO编号、TABLE编号、VR编号、MODBUS编号等。
(11)数据源:选择采集的数据类型,下拉菜单选择,多种类型参数可选。
(12)偏移:波形纵轴偏移量设置。
(13)垂直刻度:纵轴一格的刻度。
(14)水平刻度:横轴一格的刻度。
(15)导入:导入之前导出的波形数据
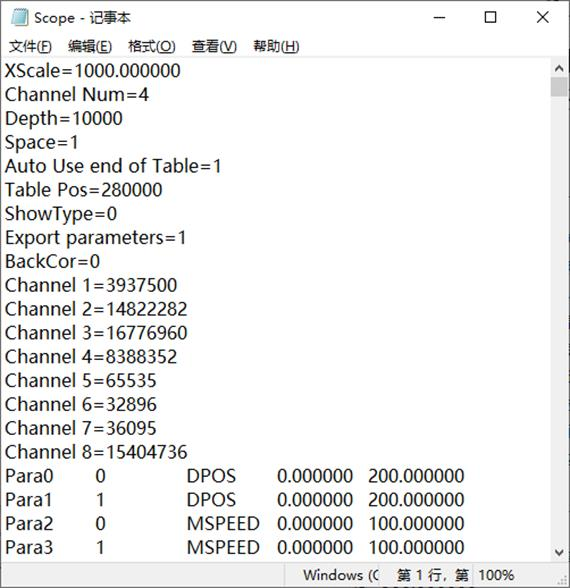
(16)导出:先在设置里勾选“导出参数”,待示波器采集完成再导出采集的数据。
若要设置示波器参数,如轴编号、数据源以及启动示波器设置窗口,要先停止示波器再设置。
点击“设置”按钮,弹出如下所示“示波器设置”窗口。
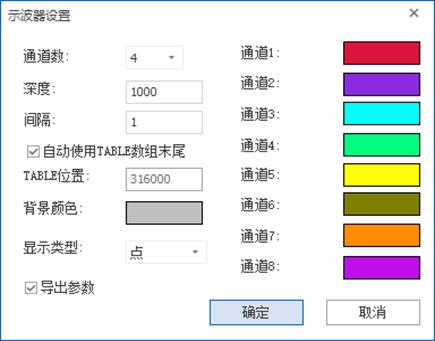
(1)通道数:要采样的通道总数。
(2)深度:总共采样的数据次数,深度越大采样范围越大。
(3)间隔:采样时间间隔,单位为系统周期,与控制器固件版本有关,一般默认1ms,指令SERVO_PERIOD查看。一般来说,间隔越小,采样数据越准确,单位时间内数据量越大。
(4)TABLE位置:设置抓取数据存放的位置,一般默认自动使用TABLE数据末尾空间,也可以自定义配置,但是设置时注意不要与程序使用的TABLE数据区域重合。
(5)背景颜色/通道颜色:设置背景与每个通道波形对应的颜色。
(6)显示类型:点和线段两种曲线类型可选。线段更容易发现异常的数据。
(7)导出参数:需要导出示波器数据时勾选。
(8)导出采样数据参数方法:现在设置里勾选“导出参数”,启动示波器采样,采样完成后点击“导出”,选择文件夹保存示波器数据。
详细使用方法参见RTSys软件菜单栏“常用”-“帮助文档”-“RTSys帮助”-“工具窗口”-“示波器”。
04
RTSys对控制器的监控与设置
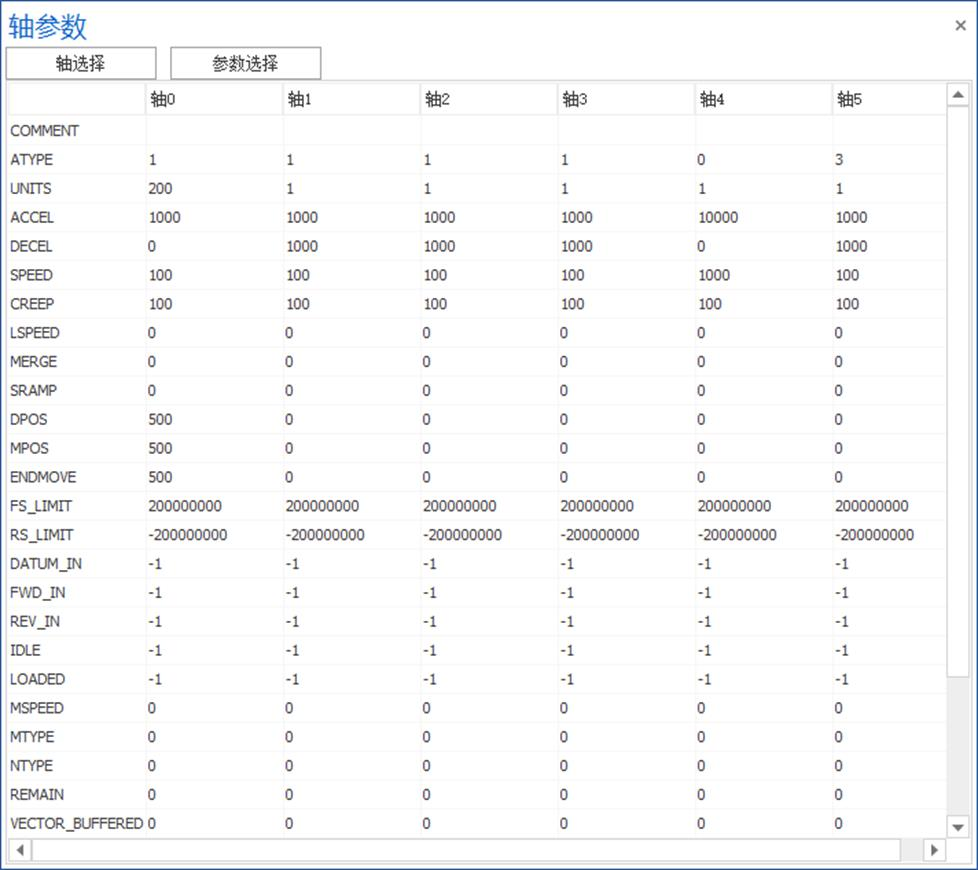
1、轴参数窗口
轴参数窗口用于监控运动控制中常见的参数,运动过程中参数的实时变化可在该窗口查看。默认显示在RTSys界面右侧,可通过菜单栏“视图”→“轴参数”打开/关闭。下方可变参数可以双击后直接修改,只读参数不支持修改,参数指令含义可查看RTBasic帮助。该窗口还支持进行“轴选择”和“参数选择”。
| 参数 | 描述 |
| ATYPE | 轴类型设置,例如值设置为0表示虚轴,1为脉冲输出,3为正交编码输入,65为EtherCAT CSP模式。 |
| UNITS | 脉冲当量,指定每单位发送的脉冲数,支持5位小数精度。 |
| ACCEL/DECEL | 轴加速度/轴减速度,单位为units/s/s。当多轴运动时,轴组插补运动的加速度为主轴合成矢量加速度/主轴合成矢量减速度,不设置DECEL时,默认等于ACCEL的值。 |
| SPEED | 轴速度,单位为units/s。当多轴运动时,作为轴组插补运动时主轴的合成矢量速度。 |
| CREEP | 轴回零时爬行速度,用于原点搜寻,单位为units/s。 |
| LSPEED | 轴起始速度,同时用于停止速度,缺省0,单位为units/s。多轴运动时为轴组插补运动的合成矢量起始速度。当追求效率时,此值可设置非0值,但不可设置过大。 |
| MERGE | 设置ON时,前后缓冲的运动连接到一起而不减速,用于连续插补。 |
| SRAMP | 加减速过程S曲线设置,单位为ms。多轴运动时,为轴组合成矢量曲线的时间。 |
| DPOS | 轴的期望坐标位置,或称目标位置。单位是units。 |
| MPOS | 轴的测量反馈位置,或称实际位置。单位是units。 |
| ENDMOVE | 轴当前运动的最终目标绝对位置。单位是units。 |
| FS_LIMIT | 轴正向软限位位置,单位是units。轴运动越界会停止并报错FSOFT。 |
| RS_LIMIT | 轴负向软限位位置,单位是units。轴运动越界会停止并报错RSOFT。 |
| DATUM_IN | 原点开关对应的输入口编号,-1无效。 |
| FWD_IN/REV_IN | 正向/负向硬件限位开关对应的输入点编号,-1无效。控制器限位信号生效后,会立即停止轴,停止减速度为FAST_DEC。FAST_DEC一般设置为10倍的DECEL。 |
| IDLE | 轴当前运动状态判断,运动中返回0,运动结束返回-1,只读。 |
| LOADED | 运动缓冲区没有缓冲的运动指令时返回TURE,否则FALSE,只读。 |
| MSPEED | 轴的测量反馈的实际速度,单位是units/s。MSPEED为MPOS微分出来的数值,只读。 |
| MTYPE/NTYPE | 当前正在进行运动指令类型MTYPE/被缓冲的第一条运动指令类型NTYPE。当插补联动时,对从轴总是返回合成矢量主轴的运动指令类型,只读。 |
| REMAIN | 返回轴当前运动MTYPE还未完成的距离,单位是units,只读。 |
| VECTOR_BUFFERED | 返回轴当前当前运动和缓冲运动还未完成的距离,单位是units。对多轴插补是合成矢量距离,单位是units。 |
| VP_SPEED | 返回轴当前运动的规划速度,单位为units/s。当多轴运动时,轴组返回的是插补运动的合速度,不是主轴的分速度。非主轴返回的是该轴对应合成矢量速度相应的分速度,与MSPEED效果一致,只读。 |
| AXISSTATUS | 查看轴各种位的状态,例如:正反向硬限位,正反向软限位,轴运行状态等,只读。 |
| MOVE_MARK | 运动指令的MARK标号,这个标号会和运动指令一起写入运动缓冲。每调用一条运动指令,MOVE_MARK会自动加一。如果要强制指定MOVE_MARK,需要每次运动前都设定一次。通过MOVE_PAUSE指令可以在MARK不同的边界处暂停。 |
| MOVE_CURMARK | 返回当前轴正在运动指令的MOVE_MARK标号。 |
更多参数参见正运动技术《RTBasic编程手册》中轴参数与轴状态指令。
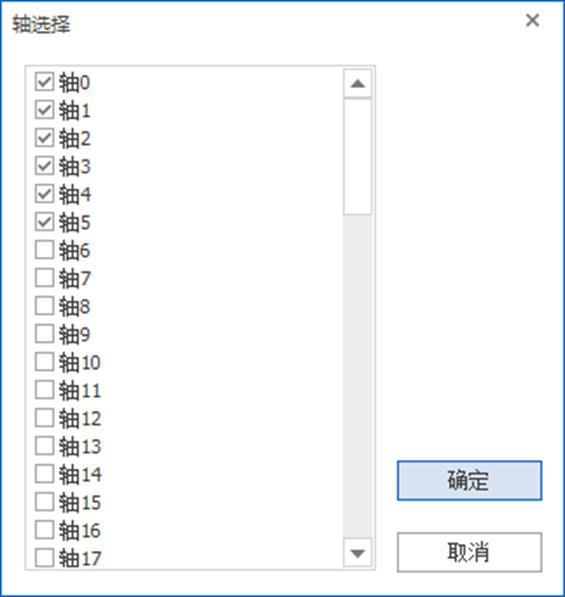
轴选择:用户自由选择需要监控的轴号显示在窗口。勾选轴号点击“确定”即可。
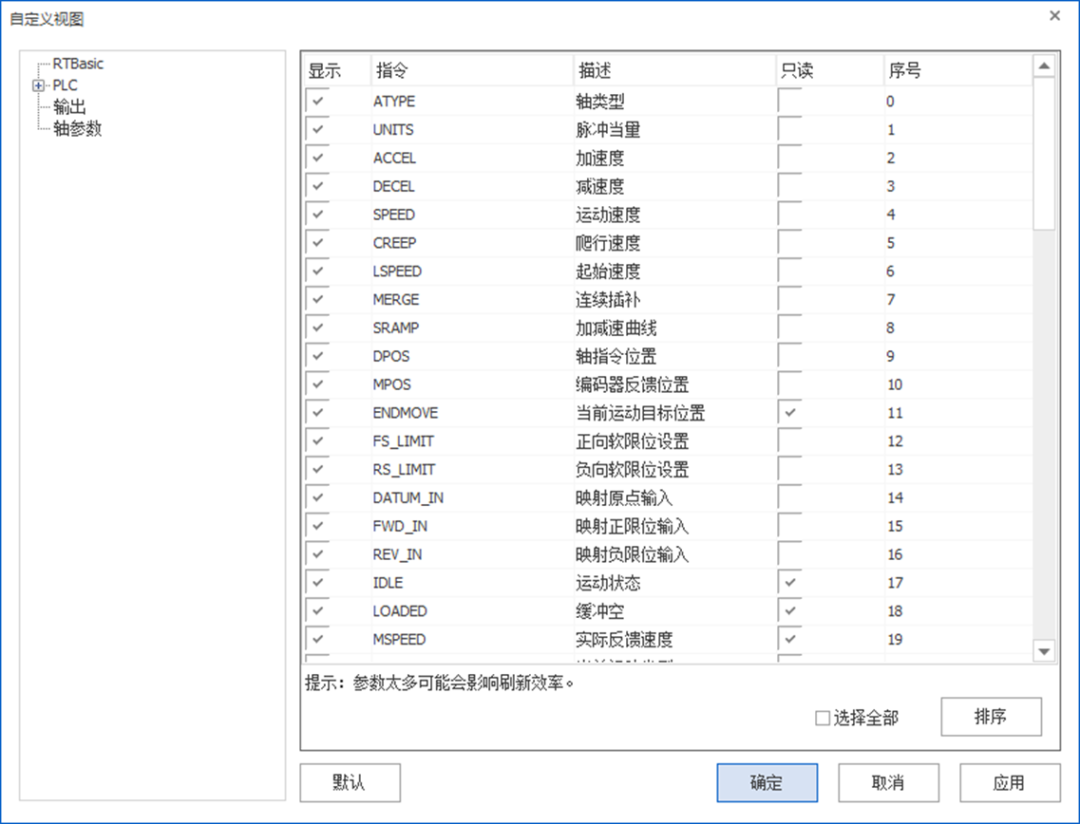
参数选择:可自定义选择需要监控显示的轴参数,选择监控的参数不宜过多,否则会影响刷新效率。
该窗口中有较多参数指令提供选择,并对各个参数指令进行简单描述。部分轴参数只支持只读,部分可读可写,可根据参数选择中的“只读”列是否勾选进行查看。同时支持对窗口参数自定义排序。
排序的操作方法:打开“参数选择”窗口,选好需要显示的参数,点击“排序”,此时该按钮显示为“排序中…”,在序号列按所需顺序依次对参数进行点击,点击后序号会变为新序号。排序完毕后再次点击“排序中…”结束排序,点击“确定”/“应用”即可生效。(注:排序过程中时,若某个参数排序点错,再次点击该参数无法重新排序,须先结束排序再从头开始)
若要恢复初始显示,则点击“默认”即可。
2、手动运动
手动运动:用于通过手动操作电机。可通过菜单栏“工具”→“手动运动”打开。
操作方法:连接好控制器及电机,打开该工具。可在左侧实时输入/修改轴相关的参数,选择轴号(可在下拉列表中选择),设置好相关参数后,按住“左转”/“右转”按钮不放,电机持续左或右运动,松开按钮停止运动。“指令位置”显示当前DPOS运动距离(单位为units)。填写“距离”参数,点击“运动”,勾选“绝对”时,电机运动到绝对距离参数位置;不勾选“绝对”时,点击“运动”,电机按相对距离参数运动。
“反馈位置”/“运动状态”/“轴状态”用于监测反馈轴运动状态,这三个参数均为只读,不可修改。按下“停止”按钮轴运动立刻停止。

3、输入口和输出口检测
(1)输入口
用于实时检测控制器输入口状态变化。该窗口的输入状态随控制器输入口状态变化而变化。通过菜单栏“工具”→“输入口”打开。
程序中使用INVERT_IN指令设置使某个输入口输入反转(ZMC系列的特殊输入定义后需要信号反转,因为ZMC系列是OFF有效,ECI系列不需要反转)。设置了输入反转之后,“输入反转”一栏绿灯常量,无反转则是暗红色,此时输入口有输入信号时,“输入状态”显示灰色,输入口无输入显示绿色。
“特殊输入”用来显示原点、限位、报警等特殊信号提示。
例:JOG运动
RAPIDSTOP(2) WAIT IDLE(0) BASE(0) DPOS = 0 ATYPE = 1 UNITS = 100 SPEED = 100 ACCEL = 1000 DECEL = 1000 CREEP=10 DATUM_IN = 5 '输入IN5作为原点开关 INVERT_IN(5,ON) '反转IN5电平信号,常开信号进行反转(ZMC控制器) FWD_IN = 6 '设置正向限位开关 INVERT_IN(6,ON) '反转信号 REV_IN = 7 '设置负向限位开关 INVERT_IN(7,ON) '反转信号 ALM_IN = 8 '设置报警信号 INVERT_IN(8,ON) '反转信号 JOGSPEED = 50 'JOG速度50 FWD_JOG = 0 '输入IN0作为正向JOG开关 REV_JOG = 1 '输入IN1作为负向JOG开关 INVERT_IN(0,ON) '反转信号 INVERT_IN(1,ON) DATUM(3) '回零模式
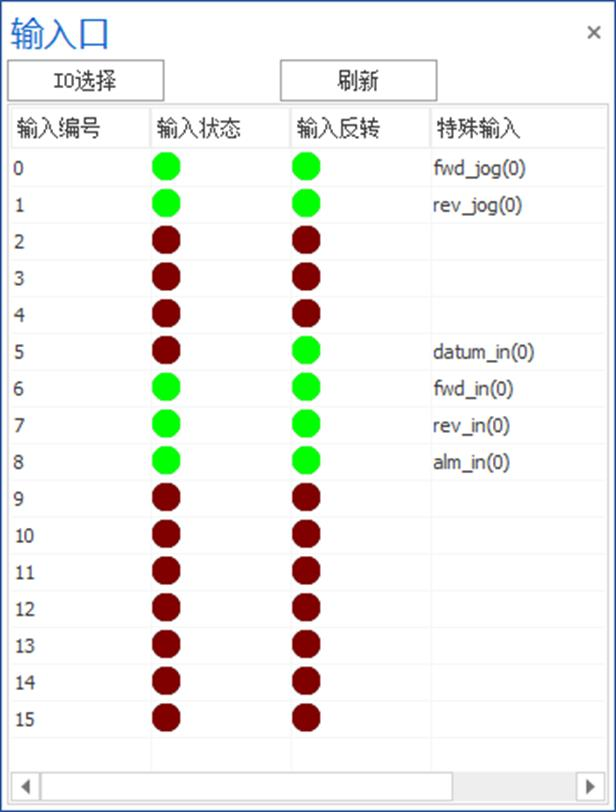
上图中,输入IN0、IN1、IN5、IN6、IN7、IN8均定义输入反转(ZMC系列控制器默认OFF有效,故进行信号反转,ECI系列与之相反)。当给IN5一个输入信号时,反转后输入状态灯则不亮,其他口均无输入。
点击“IO选择”可自定义显示输入IO口,每16个输入一组,如下图所示。“刷新”刷新各个输入IO的状态及特殊功能定义。
(2)输出口
用于监测控制器OUT口状态并对输出口进行操作。通过“工具”→“输出口”打开。查看OUT口状态还可通过仿真器查看,但仅能显示编号0-11的状态。
操作方法:按下按钮能操作OP口输出,如下图,OP1口和OP2口开启,其他口关闭。“IO选择”选择要显示的输出,每16个输出一组。直接点击输出口可以切换其输出状态。

4、寄存器
用于批量查看控制器寄存器的数值,可以选择查看不同类型的寄存器(支持PLC功能的控制器才支持此功能)。使用该窗口可通过菜单栏“工具”→“寄存器”打开。
使用方法:选择要读取的寄存器的类型、起始编号、个数后点击“读取”即可在窗口显示出数据。勾选自动刷新功能便于自动实时采集寄存器值变化并显示出来,否则需要再次点击读取才能获取的寄存器的值变化情况。 注意:读取个数不要超出寄存器范围,否则会提示错误。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。