蔚来升级中央计算平台,舱驾融合技术到底是什么?
今天,蔚来宣布旗下2024款第二代平台车型的电子电气架构将由域控架构升级为中央计算平台,这其中最大的改变是由原来的智舱、智驾分离升级为了舱驾融合。
坦白说,这不是一项非常容易感知的技术升级,但对于整车智能的持续进化和性能释放都非常重要。事实上,中央计算平台和舱驾融合已经成为了整个行业的趋势,蔚来也并非第一个推出这一技术的车企。

软件定义汽车的终极架构

汽车电子电气架构承载着汽车上各项科技和智能功能。随着汽车智能功能的增多,传统的分布式架构在近几年加速过渡到域控架构。汽车上的ECU的数量大大减少,控制管理也更容易。
随着汽车芯片算力进一步提升,车企开始考虑如何进一步挖掘汽车上的算力,实现更多的跨域联动的功能,达到1+1>2的效果。比如,用智驾芯片的图形能力,来做人脸识别、3D渲染,用底盘系统的控制能力给智驾系统做安全冗余等等。
于是,不少供应商和车企提出了汽车的下一代电子电气架构——域控融合,甚至是完全的单芯片中央计算架构。其中智能功能最多的座舱和辅助驾驶最先实现了一体化,也就是舱驾融合。所谓舱驾融合就是将原本独立的座舱芯片和智驾芯片焊在同一块板上,让二者可以实现部分的算力共享,这种方式称之为One Board。

在2023年,就已经有不少车企和供应商推出了舱驾融合和中央计算架构技术:特斯拉的HW3.0、HW4.0集成了AMD座舱芯片和FSD芯片, 小鹏G6 ( 参数 | 询价 ) 所搭载的X-EEA电子电气架构3.5版本,采用了中央计算+域集中式的混合架构;集度01也使用了高通 8295 智舱芯片和英伟达 Orin X 智驾芯片两颗域控制器的舱驾融合。按照集度的说法,两个域控可以共享算力、感知、服务,智舱域控制器可支持智驾系统失效下的系统级安全冗余,而智驾域控制器则可支持智舱3D人机共驾地图的极致AI交互
东软睿驰在高性能行泊一体域控制器X-Box 4.0上,集成了基于地平线J5+芯驰X9系列芯片的组合方案。亿咖通发布的汽车大脑,也是集成的是一颗来自芯擎科技的龍鷹一号智能座舱芯片和来自黑芝麻智能的智能驾驶芯片,同样实现了舱驾融合。这次蔚来发布的中央计算平台同样是典型的舱驾融合方案:1颗高通骁龙8295智能座舱芯片+4颗英伟达Orin X智能驾驶芯片。

让汽车控制更加简单

就像域控相比分布式架构更加简单高效一样,中央计算平台让整车电子电气架构的效率更上了一层楼,同时,线束长度也大大降低、成本也随之降低。
根据蔚来的描述,新的中央计算平台集成器件数量12,000+,攻克了高集成度带来的PI/SI,EMC,Thermal等技术难题,相较于分离式舱驾域控制器体积减少40%,重量减轻20%。

同时,中央计算平台ADAM可以让车内不同域之间不再需要编码解码,省去了编码和解码的芯片、电源、散热、线束等,通过电路板上的蚀刻电路直接取代千兆以太网,智驾和座舱之间跨域数据带宽从千兆大幅提升到16Gbps,实现10倍以上的传输速率提升。
除了简化、减重,舱驾融合最大的优势在于算力共享,车企可以充分挖掘算力。蔚来表示,通过系统级创新实现智驾、智舱和整车控制最大256TOPS算力共享。如车内乘员识别,属于智能座舱芯片任务,但智能驾驶芯片英伟达Orin X更擅长AI计算和图像处理,中央计算平台算力调用功能就可以用Orin X芯片来处理乘员识别任务,进而提升任务运行效率,把座舱芯片算力留给更擅长的任务。

此外,跨域算力共享可以更合理分配各个大算力需求,如多模大模型的端侧部署,物尽其用,最优化CPU/GPU/NPU使用效率,充分发挥中央计算平台的超级算力。蔚来表示,为用车而创新的大模型NOMI GPT 即将发布,并将搭载于新一代的中央计算平台上。
其他品牌也是为了同样的目的,比如亿咖通的舱驾一体方案也可以实现两块芯片的算力共享,同时让整车线束减少5%,研发成本降低15%,BOM成本降低20%。

All in One?

不难看出,现阶段车企的中央计算平台和舱驾融合,只是One Board,让智舱和智驾两个芯片实现了融合互通,而在他们的蓝图里,终极的中央计算平台应该是是用一颗芯片就完成所有的功能,甚至还可以囊括底盘、动力等更多的域控功能,即One Chip。
德赛西威相关负责人表示:“随着舱驾融合芯片的发展,SOA架构技术快速演进,以及OEM对成本优化需求持续增长,用户对智能化功能需求不断提升,多重因素叠加,推动单芯片舱驾融合的量产应用速度正在加快。预计2024年将成为单芯片舱驾融合落地的重要机遇年。”
换言之,All in One,使用一颗芯片来解决全车功能控制或许才是汽车电子电气架构的最终形式,像英伟达和高通的下一代车载芯片都将具备合二为一的舱驾融合能力。
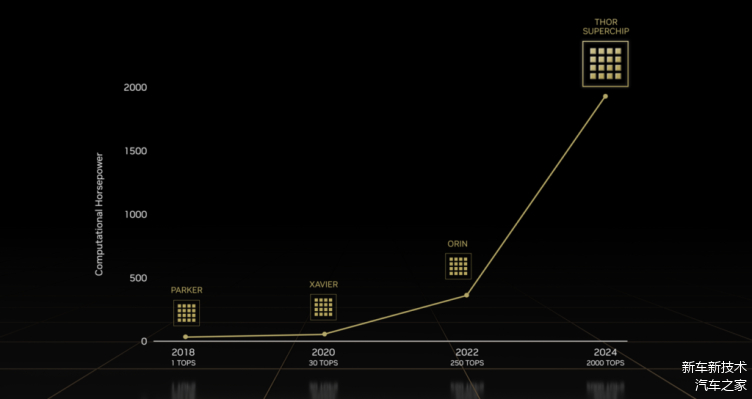
英伟达THOR拥有2000 TOPS 和 2000 TFLOPS的计算能力,这些算力可以全部用于自动驾驶工作流,也可以进行拆分,将其配置为一部分用于驾驶舱 AI 和信息娱乐功能,一部分用于辅助驾驶。多域计算时,THOR可以将自动驾驶、车载信息娱乐等功能划分为不同的任务区间,同时运行,互不干扰。比如车辆在一颗THOR上同时运行 Linux、QNX 和 Android等不同的系统。
此外高通也发了骁龙Ride Flex芯片,最高算力也达到了2000TOPS,Ride Flex同样支持舱驾融合,支持整个车内的计算和Robotaxi级别的自动驾驶能力。
不过,让一块芯片完成全车的控制或许并不是最好的汽车控制方案。前不久我看到一位网友的有趣思考:人以及地球上大部分动物是典型的中央计算,大脑控制着我们的思考和行动,但我们保持身体运行的所有控制行为并非都由大脑完成。

比如,呼吸系统、消化系统、心血管系统等子系统运行是由脑干控制的,大脑无法进行强力干预和控制。此外,人体还有很多直接端规控,比如摸到滚烫的开水杯,我们的手不会经过大脑计算反应,直接把手缩回去。
很多应急驾驶反应,我们也并非通过大脑直接控制。比如前方突然出现障碍物时,大部分人并不会按照交规规定那样让速不让道,而是会顺应避险心理,急打方向以求躲避碰撞。
所以有人认为,汽车使用一颗芯片All in One可能并非最理想的方案。比如AEB紧急制动这种紧急方案或许使用端控可能更加适合,这样可以摆脱与AEB传感器和刹车系统与中央平台的通信和决策延迟,更快地进行制动。
对于这一看法,我们采访一位蔚来自动驾驶工程师,他表示:“汽车控制相对于动物神经系统来说还是太简单了,如果考虑对无关紧要小的功能放权,意味着控制单元和算力的分散,这样就回到了分布式和成本上升的老路上了。只要算力和通信带宽有足够的性能保证,单芯片中央计算肯定是更好的方案,等到汽车真正实现了ONE CHIP,再考虑怎么分散放权才有意义。”

凭借成本更低、通讯时延更短、OTA升级空间更大、用户体验提升等优势,舱驾融合和中央计算技术将在未来加速普及,纵然当下高通、英伟达在这一领域占据了领先优势,但百度、华为、德赛西威等国内厂商也正在加速追赶。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。