使用SaberRD对汽车转向指示灯电路进行自动潜通路分析
1. 介绍
潜通路是指电子电气系统中意外存在的通路或逻辑流,它可以启动不需要的功能或抑制需要的功能。其实这些是设计者无意地设计进系统的,它与硬件失效无关,而是一旦被激发,它就以非期望的行为出现。潜在通路的出现常常会给系统设备乃至人身造成巨大的危害。
现代车辆中,电气系统所包含的电路数量多达数百个,因此在设计中,一个重要的环节就是确保将所有组件连接在一起的电线能够安全地运行,以实现广泛的条件下实现令人满意的操作。
在本文提供的设计示例中,您可以使用SaberRD的故障工具对典型的汽车转向指示灯电路进行自动潜通路分析。设计示例包括分析标称条件和故障条件下的设计性能。
2. 汽车转向灯电路的潜行路径分析
汽车转向指示灯电路原理图见下图1:
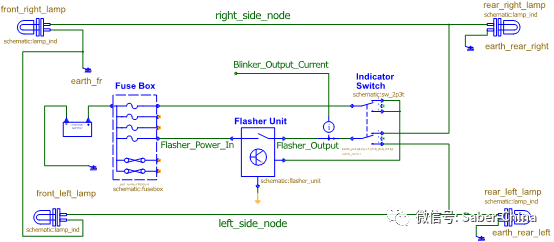
图1 汽车转向指示灯电路原理图
每个组件后面都有一个仿真模型,用于捕捉每个组件的物理和电气特性。接地点被建模为一个简单的电阻值。转向指示灯开关具有动态特性,可以在仿真过程中改变以打开左侧或右侧指示灯电路。来自转向指示灯开关的转向位置输入进入闪光器单元。
闪光装置由电池通过保险丝供电,并根据转向开关位置通过指示灯开关触点向适当的转向指示灯(左或右)提供闪烁信号。灯模型模拟了冷启动行为,这会在初始开启时引起电流浪涌,而开启时间由灯丝预热决定。
2.1. 标称操作
设计分析的第一步是仿真和测量设计的一组标称值。
下载随附的设计并在SaberRD 中打开sneak_path_example.ai_dsn。此设计示例包括用于自动化仿真和后处理的实验。在“Simulate”选项卡下,请从下拉菜单中选择“实验”。这将打开一个额外的下拉菜单,您可以在其中选择所需的实验并自动运行模拟。要在标称条件下分析设计,请使用实验文件“Nominal_analysis”运行仿真,如下图2所示。
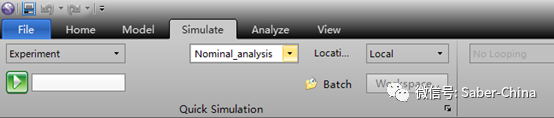
图2 标称分析仿真设置
仿真运行11秒。转向指示灯开关被编程为从t=1秒到t=5秒打开右侧指示灯,从t=6秒到t=10秒打开左侧指示灯。在分析中,通过/失败测试标准添加到实验中以检查以下内容。
1)存在潜通路
2)过电流消耗
3)每个转向指示灯的功能都符合预期
这些测试通过或失败与否将由实验内部的设定标准决定,而标准是基于在正常操作条件下针对此给定仿真设置和仿真时间在左节点、右节点、闪光灯输出和每个转向指示灯处测量的平均电压和/或电流值得出的。
运行仿真后,您将可以访问相应的实验报告和“结果”部分中的绘图信号,也可以通过双击打开它们。正常运行下应该可以看到如下实验报告图3和信号波形图4。
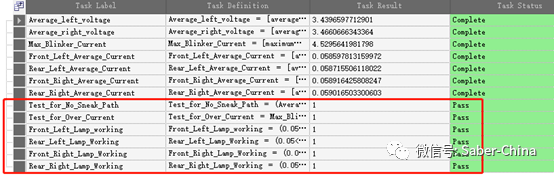
图3 标称分析实验报告
从实验报告中可以观察到所有的测试标准都通过了。
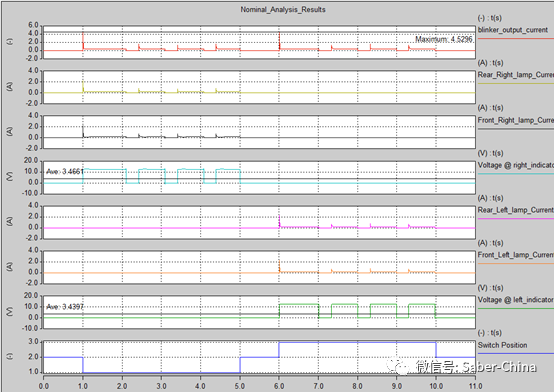
图4 标称分析波形图
2.2. 潜通路分析
在汽车中,通常由许多接地螺栓将负载连接到汽车/卡车的车身,从而为负载提供接地。当接地连接因振动而严重生锈或完全脱落时,连接到该接地螺柱的负载可能会建立一条不需要的电路路径,称为通过其他一些接地螺柱的潜通路。我们可以使用SaberRD中的故障工具Fault自动模拟此类故障并分析其影响。
仿真模型明显的优势就是它可以“即时”重新编程。例如,任何接地点、连接器甚至电线的电阻值都可以在仿真过程中改变,并且可以观察到对设计的影响。
在本设计示例中,左右前灯在一个接地点一起接地。如果该点出现故障或变为高电阻,则灯可以通过后指示灯找到替代接地路径。这种所谓的“潜通路”在车辆上很常见,并且通常很明显,因为在亮度降低的情况下,比预期更多的灯会“ON”。在此测试中,前接地点电阻在 8秒时更改为1千欧姆,作为故障工具内的参数故障,如下图5所示。

图5 潜通路分析的故障设置
由于这种接地故障,左前灯、右前灯和右后灯串联连接,它们通过右后接地形成备用接地,如下图6所示。当左边的指示灯应该单独打开时,由于潜通路的存在,这些意外的灯会在降低的电压下打开。
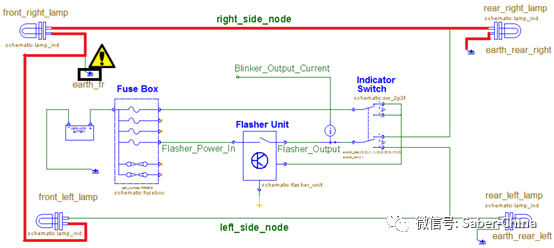
图6 前面接地故障导致的潜通路
使用实验文件“Sneak_Analysis”仿真以执行潜通路分析。在此潜通路分析中,标称操作测试的pass/fail标准将被重新检查。仿真完成后,您应注意以下几点实验报告图7和信号波形图8。

图7 潜通路分析实验报告
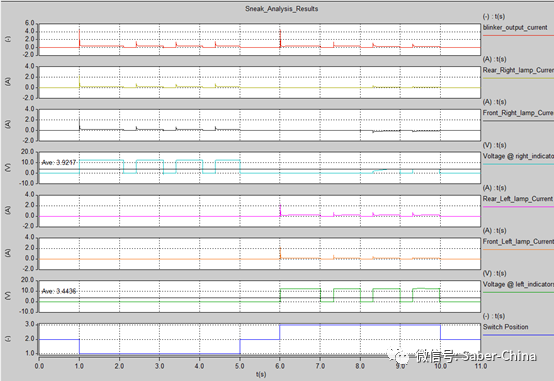
图8 潜通路分析波形图
从实验报告中可以观察到,只有左后灯通过了测试并按预期工作。因此,可以使用 SaberRD中的故障工具通过查找所有可能的接地路径,依次设置故障来自动分析潜通路现象。
2.3. 故障分析
SaberRD中的故障工具可用于分析设计中的各种故障(开路、短路和参数故障)。本节我们再分析一些故障的影响。这里我们在故障工具中设置了以下3个故障,如图9 所示。
1)右前灯正极端子开路 - 发生在3秒
2)右前灯正极和负极短路 - 发生在3秒
3)闪光灯输出打开 - 发生在7秒

图9 故障设置
可以通过故障工具中的“Fault begin”和“Fault End”字段来控制故障的时间。通过实验分析器,这些故障注入的仿真和后处理是自动化的。要对这些故障进行故障分析,请使用实验文件“Fault_Analysis”运行仿真。对这些故障中的每一个自动进行仿真,仿真后您将获得如图10多个波形,得到如图11所示的实验报告。
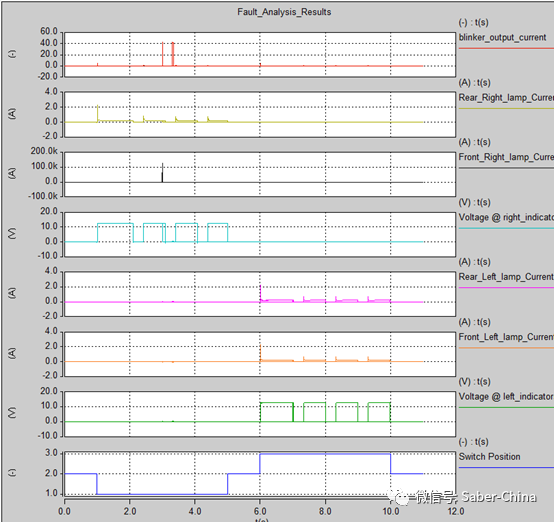
图10 故障分析波形图
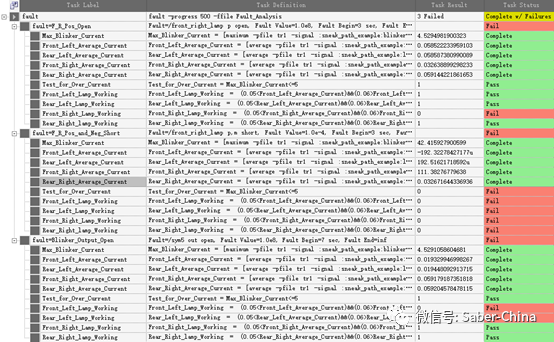
图11 故障分析实验报告
注意:您还可以通过对故障进行分组来注入并发故障。
要查看仅与特定注入故障对应的波形,您可以在运行仿真之前单独启用该特定故障,如下图12所示,或者您可以使用成员属性选项控制显示的多成员信号的可见性,如图所示13。

图12 故障选择
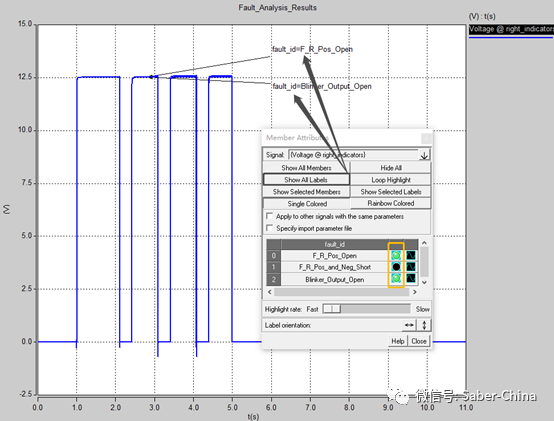
图13 控制多成员信号
正如您在实验报告中看到的那样,对于每个故障,某些测试标准是失败的。通过分析实验报告中每个故障的通过/失败测试结果,可以发现
1)“右前灯正极端子开路”故障仅影响右前灯。
2)故障“右前灯正负端短路”影响所有灯,在此故障场景中所有测试标准都失败。这是因为当短路故障发生在3秒时,闪光器输入线路保险丝熔断以保护电线和组件。参看图14的仿真过程截图。
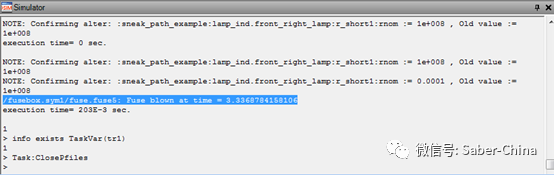
图14 SaberRD仿真过程窗口截图
3)发生在7秒时的“Blinker output open”故障影响左前、左后指示灯,该故障场景通过其它测试标准。
3. 结论:
在本设计示例中,针对典型的汽车转向指示灯电路演示了自动潜通路分析。这种方法可用于任何设计,因此使用SaberRD中的故障工具和实验分析器,可以轻松地自动化和分析包括潜通路在内的各种故障场景。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。