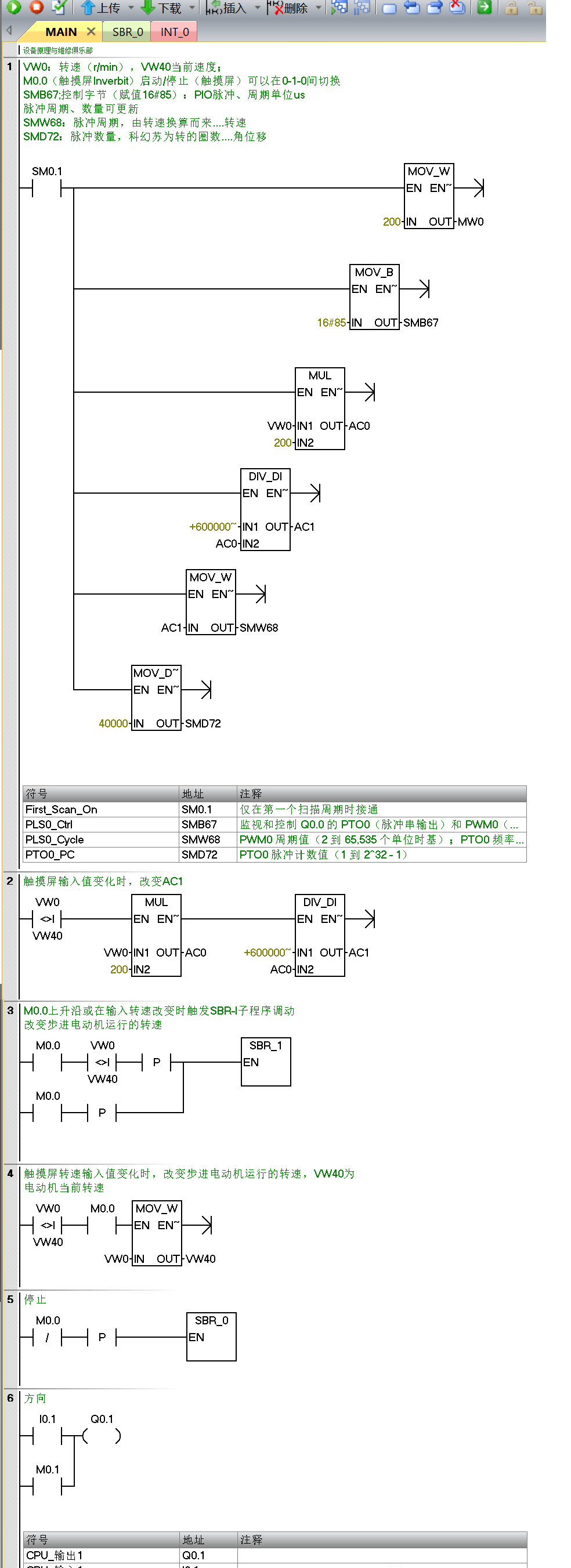
控制要求:
用HMI设定步进电动机的速度。系统应能依据设定的速度运行,若在运行期间改变速度设定值,电动机转速应能随之改变。设定启动按钮及停止按钮。按下启动按钮,步进电动机按照HMI设定的速度运行,改变设定值,步进电动机的运行速度随之变化,按下停止按钮,电动机停止运行。
主程序:
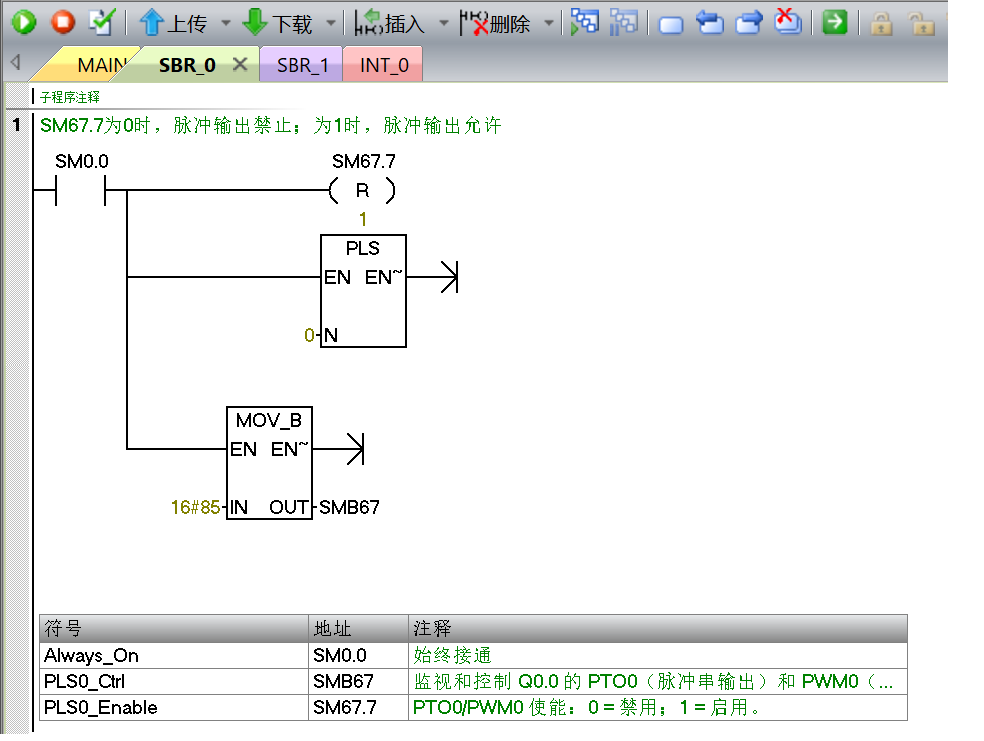
子程序:
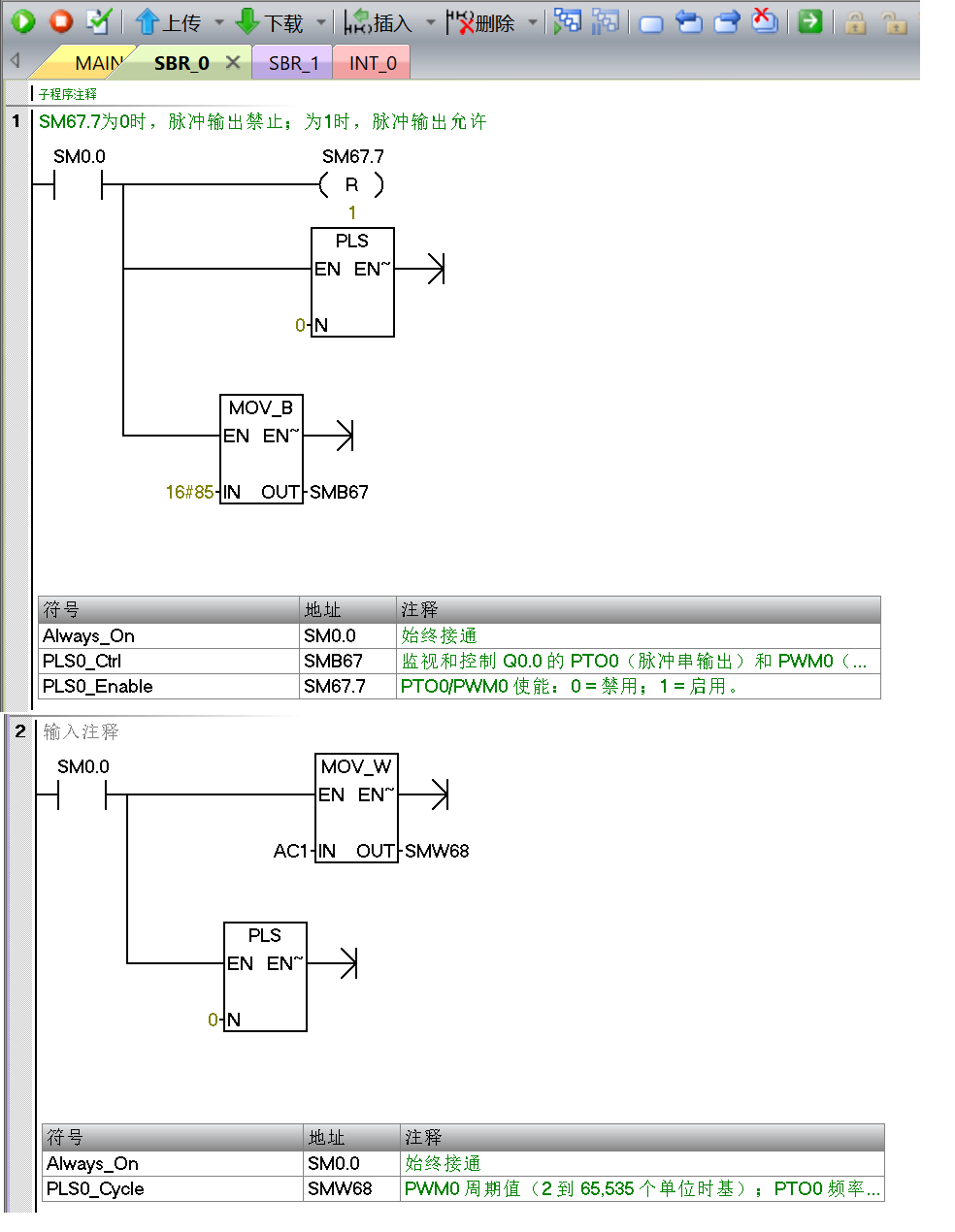
子程序:
控制要求:
用HMI设定步进电动机的速度。系统应能依据设定的速度运行,若在运行期间改变速度设定值,电动机转速应能随之改变。设定启动按钮及停止按钮。按下启动按钮,步进电动机按照HMI设定的速度运行,改变设定值,步进电动机的运行速度随之变化,按下停止按钮,电动机停止运行。
主程序:
子程序:
子程序:
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。

,用每个节拍的间隔时间来对电机的转动速度进行控制,间隔越短电机速度越快,扭矩也就越小。 按圈数运行,这里值得说明的是,步进电机每旋转一个完整的周期(8拍)并使是转轴旋转了一圈,电机...

导体在磁场作用下,会产生感应电动势,从而产生转矩,使转子开始旋转。由于异步电机转矩与转子速度的平方成正比,因此当电机负载增加时,转子速度会降低,从而增加输出转矩。 总的来说,步进电机通过控制器精确控制电机...

计算出来,从而和控制器的理想转速作差,实现速度控制。 而我这里的速度闭环是通过计算上一个时钟周期时给步进电机的控制量,通过运动学方程分解,得到机器人的虚拟速度,与理想转速作差控制。我认为这种速度...

/ 100步=每步3.6度。该值通常称为步进电机“步进角”。 步进电机有三种基本类型,可变磁阻,永磁体和混合动力(两者的一种组合)。甲步进电机特别适用于需要精确的定位和可重复性一起启动,停止,反转和速度控制与步进电机...

基于STM32的步进电机速度控制;项目需求 在制作一个使用全向轮的机器人底盘,对于全向轮,电机的精度是影响效果的重要因素。所以使用了步进电机,使用步进电机的优点是可以不使用编码器,开环控制...

每个励磁的有效步距角减少了一半,其输出的扭矩也较低。 以上3种模式均可用于反方向转动(逆时针方向),如果顺序相反则不行。 通常,步进电机具有多极,以便减小步距角,但是,绕组的数量和驱动顺序是不变的。 4 通用DC控制算法 通用电机的速度控制...
相角控制 相角控制是通用电机速度控制的最简单的方法。通过TRIAC的点弧角的变动来控制速度。相角控制是非常经济的解决方案,但是,效率不太高,易于电磁干扰(EMI)。 通用电机的相角控制...

出的扭矩也较低。 以上3种模式均可用于反方向转动(逆时针方向),如果顺序相反则不行。 通常,步进电机具有多极,以便减小步距角,但是,绕组的数量和驱动顺序是不变的。 04 通用DC控制算法 通用电机的速度控制,特别...

,步进电机具有多极,以便减小步距角,但是,绕组的数量和驱动顺序是不变的。 通用DC控制算法 通用电机的速度控制,特别是采用2种电路的电机: 1、相角控制 2、PWM斩波控制 相角控制 相角控制是通用电机速度控制...
的数量和驱动顺序是不变的。 通用DC控制算法 通用电机的速度控制,特别是采用2种电路的电机: 相角控制 PWM斩波控制 相角控制 相角控制是通用电机速度控制的最简单的方法。通过TRIAC的点弧角的变动来控制速度...