步进电机的常用驱动方式
步进电机的驱动
stm32为例,使用ULN2003,TB6600电机驱动板,介绍步进电机的常用驱动方式。
步进电机
我使用的是一个教学用的小步进电机,驱动电压只有5V,所有的步进电机驱动原理都是类似的,电机详情如图。

产品参数

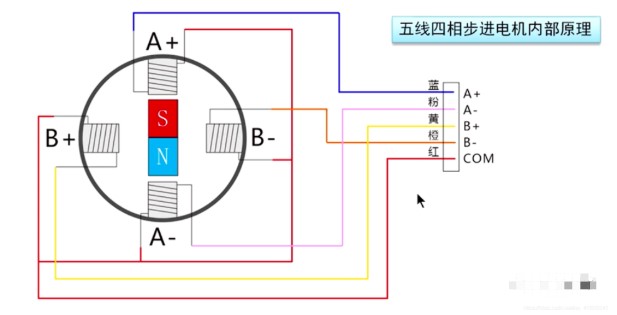
该模块为5线4相步进电机,可以使用普通的uln2003芯片驱动。
驱动要求:能够提供较快的电流上升和下降速度,使电流波形经量接近矩形。提供具有戒指期间释放电流流通的贿赂,以前降低绕组两端的反电动势,加快电流衰减。具有较高的功率及效率,步进电机的转速与脉冲信号的频率姐可以对单机进行调速。
内部结构图
四拍驱动方式

在四线驱动方式中,每次仅有一个线圈通电,对磁铁具有吸引作用,从而使电机进行转动,每次转动一个相位。改变脉冲方向,才可以正常运转。
八拍驱动方式
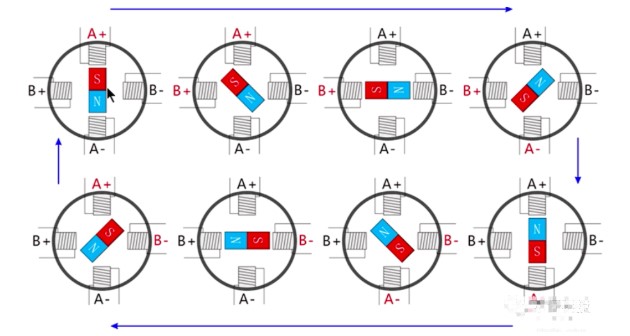
再八相驱动方式中,实现了更精细的角度控制,适用于高精度场合。
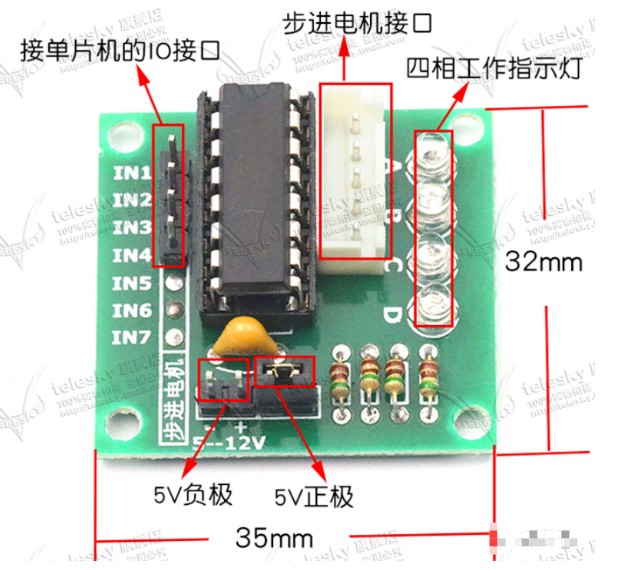
ULN2003
步进电机要加驱动才可以正常运转,其需要较大的驱动电流,单片机的引脚无法输出电流无法满足其需求,故需要ULN2003驱动芯片来驱动电机。
接线方式如图:
程序设计
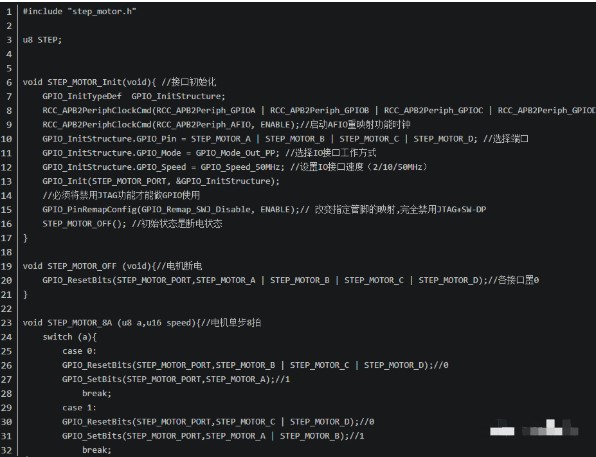
step_motor.h
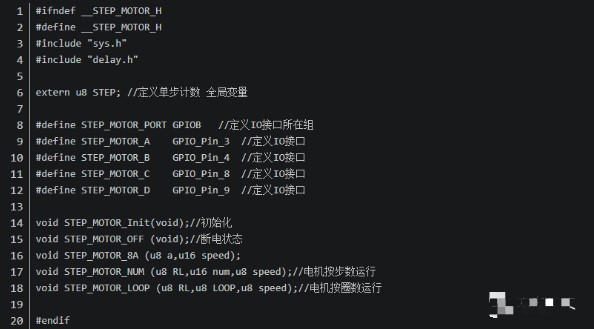
这里使用了GPIOB的几个IO口作为电机的驱动接口,当然你可以根据自己的需要修改。要特殊说明的是断电状态函数是由于步进电机在停止转动时,如果线圈还在通电,会照成电机发热甚至损坏,故在每次转动后都要将电机处于断电状态。来保护电机。
step_motor.c
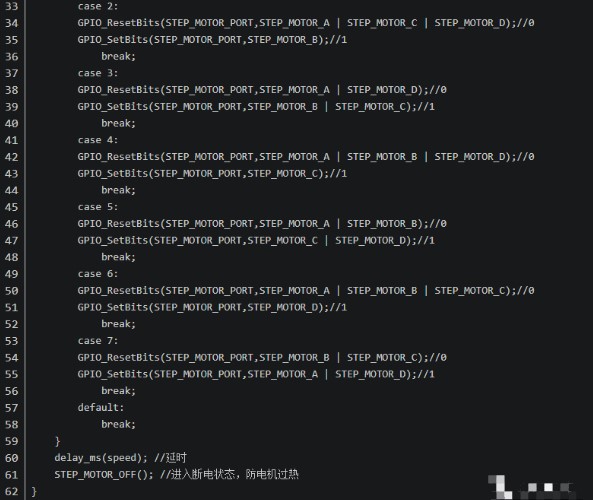
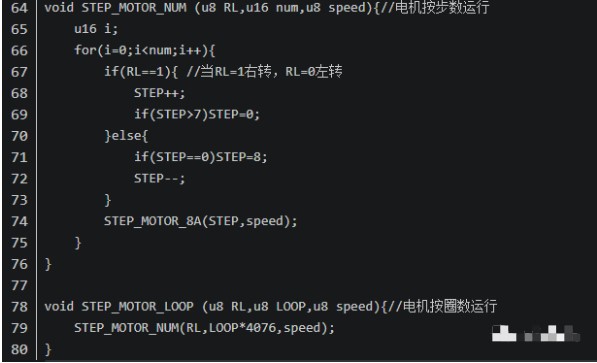
该驱动方式采用的是八拍的驱动方式,根据所在的拍数决定引脚的电平变化,电机按步数运行则是每步执行一个节拍,根据节拍的顺序07或70来对电机进行转动方向的控制,用每个节拍的间隔时间来对电机的转动速度进行控制,间隔越短电机速度越快,扭矩也就越小。
按圈数运行,这里值得说明的是,步进电机每旋转一个完整的周期(8拍)并使是转轴旋转了一圈,电机内部是由减速齿轮的,所以一个周期并不是一圈,这之间有一个转换关系,不同的电机比例系数不同,这里也可以通过调节系数,来对电机进行旋转角度的控制。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。