一直想找机会写智能驾驶关于泊车的文章,也在之前文章提过很多次了,最近靠泊车起家的纵目科技正在谋求上市融资,融资需求超20亿人民币。看来市场对这个方面还是有所期待和不少故事,很多人估计也会想为什么泊车方面有市场?泊车有哪些技术和硬件?泊车未来怎么发展?
所以本文将结合自己相关想法和认知从
泊车技术以及市场现状
泊车的功能和需求发展
泊车技术的发展路径
几方面去分享关于泊车的市场现状,功能需求和技术路径,希望能给大家一些信息和启发。当然泊车这个课题也比较巨大,错误在所难免,如有希望大家在文章底部留言或者加入微信群交流探讨学习。
泊车技术以及市场现状
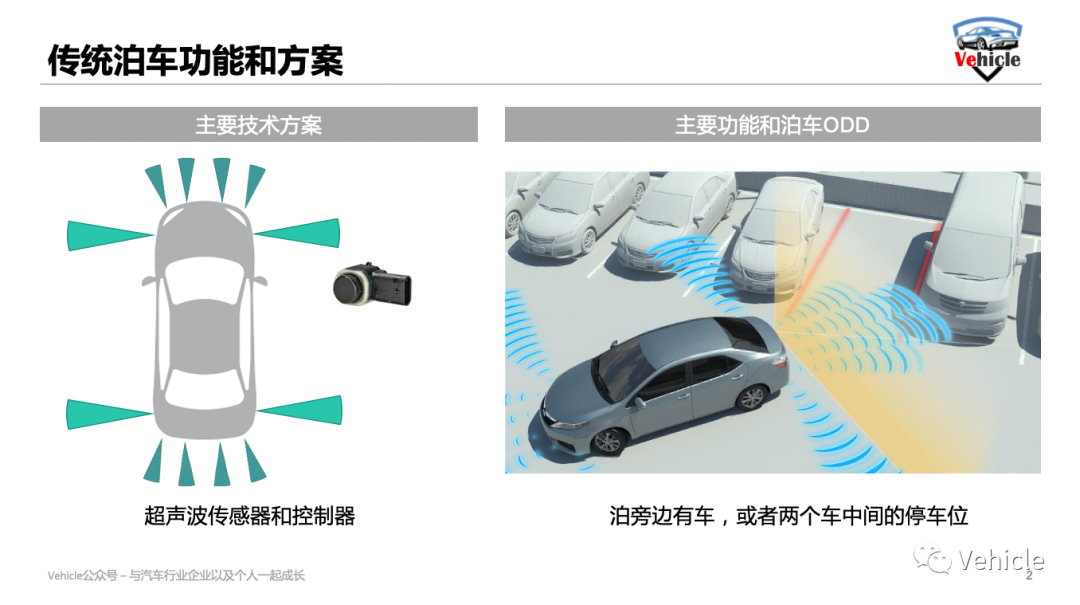
泊车其实在辅助驾驶时代,以欧美汽车占主导的市场的产品定义为“在泊车困难的场景下,进行辅助人工泊车”,来解决用户的泊车痛点。那什么情况下会泊车困难呢?一般就是拥挤的停车场里面的车位,那么探测障碍拥挤最好,最便宜的传感器就是超声波,一种探测距离较短一般大概5-6m,成本便宜的超声波雷达。 所以这个时候的辅助泊车的应用功能ODD只能泊旁边有车,或者两个车中间的停车位(外资品牌的车辆,不论豪华还是经济型到文章发表为止依然是这样),毕竟他靠超声波传感器探测障碍来实现。但这对于欧美主导的观念也完全正确,毕竟百年开车文化的欧美泊车不是难事,而且如果旁边没有车那么也肯定不需要泊车辅助。
但是到了智能驾驶应用先锋的国内以及汽车正在剧烈普及走入寻常百姓家的中国,智能泊车却是另外一番景象:
自主/自动泊车已经成为自动驾驶的一环,毕竟要实现点到点的自动驾驶必须要能够自主进入停车场泊车,驶出等。
中国大批初次驾驶的驾驶员,泊车是驾驶考试一大难关,现实中泊车成了考验是不是老司机的一个难题。
360环视大屏等泊车辅助功能已经打败了驾校教你看后视镜的习惯,我们已经开始依赖和培养起使用泊车辅助类功能习惯。
所以从客户需求来讲,到路径发展的方向来看,泊车相关的自动驾驶功能在中国还是实际存在,外资技术方案对于这块当前还比较空缺,根据高工的数据2021年智能泊车前装标配搭载率仅为11.93%,其按照预测,智能泊车前装标配搭载率预计将在未来三年有望突破40%,所以泊车市场还有广阔的空间。
泊车功能和需求发展
在泊车功能之前还有辅助泊车,通过摄像头视觉或者超声波雷达进行泊车距离和环境情况视觉提醒。当前这项功能基本硬件和软件结构比较完善,12个超声波传感器和4个鱼眼摄像头是标配作为传感器,超声波传感器负责泊车,环视摄像头负责视觉呈现。到目前大家内卷的是环视的显示精细以及3D全方位环境模拟。
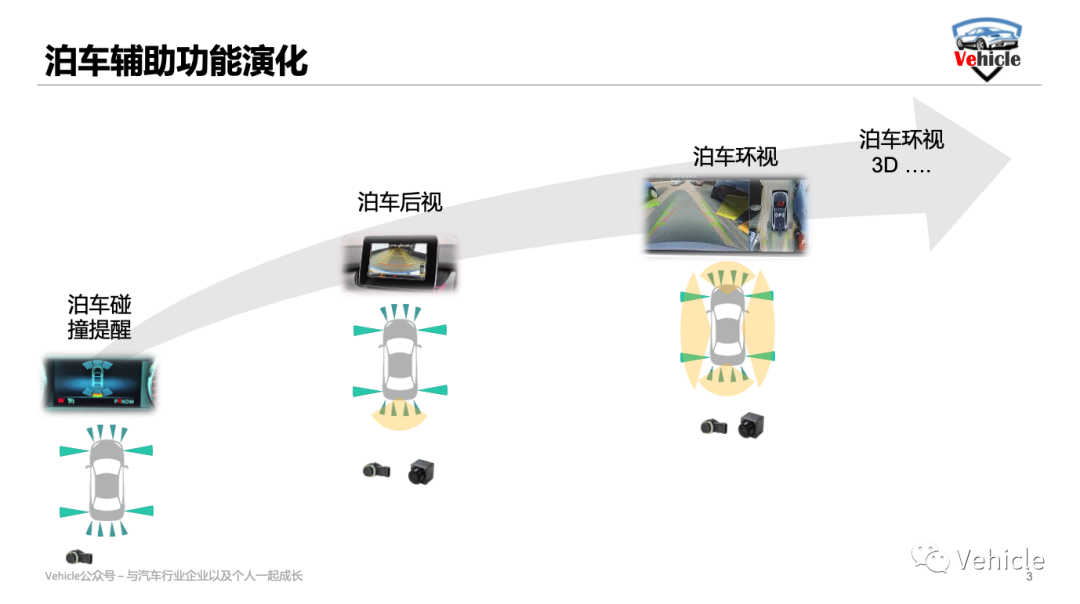
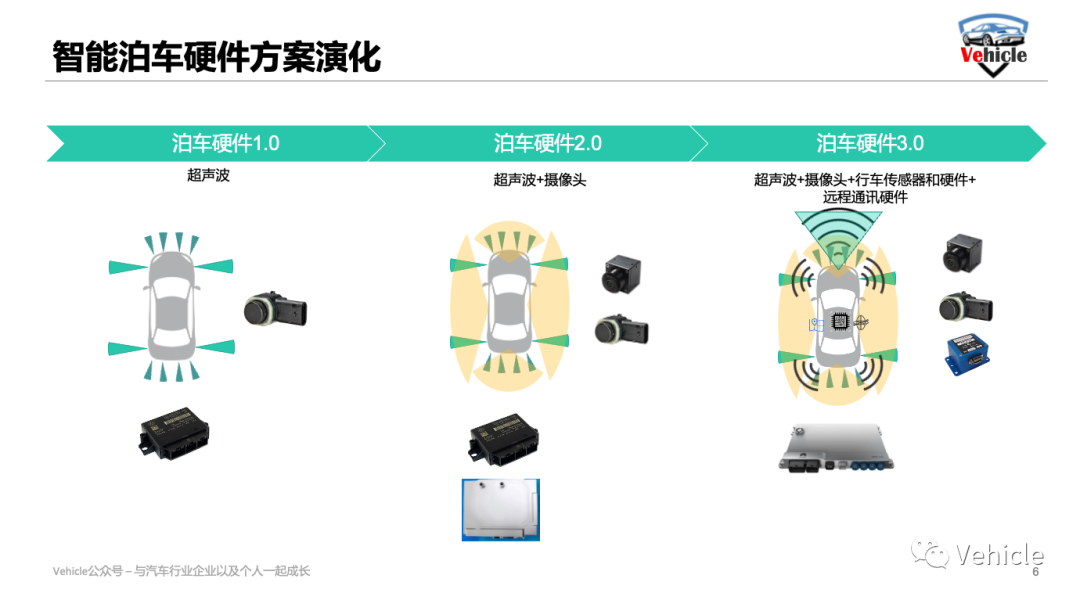
其实这个时候,视觉算法已经开始产生作用,一般环视摄像头采用广角的鱼眼摄像头,鱼眼要拼接成360度适合人类看的屏幕图像,这个时候需要图像算法和芯片算力进行矫正拼接,所以从这个时候开始国内涌现不少基于德州仪器TI的TDA2等低算力芯片处理环视的方案,也就有了我们常说的“泊车盒子”泊车控制器雏形,12个超声波以及处理芯片加上4个环视也就组成了典型的泊车硬件,我暂且称他为泊车硬件1.0,这个时候超声波信号处理输入给整车控制,而环视可能是一个视觉处理硬件盒子或者融入座舱处理作为视觉呈现。
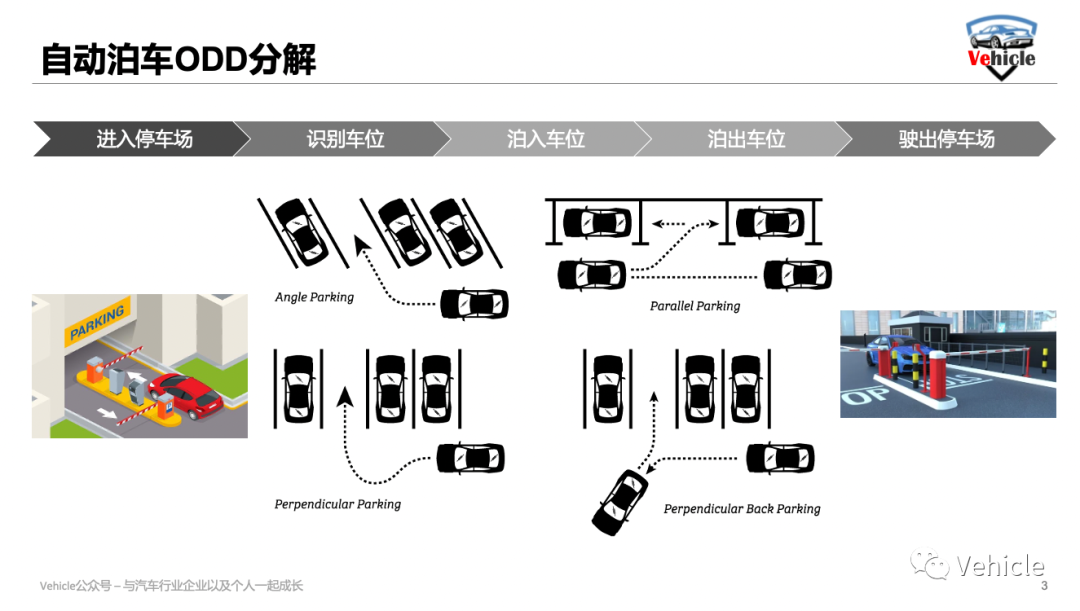
有了辅助泊车的技术之后,接下来到了泊车实施,泊车的功能需求分解,可以得到以下5步:
进入停车场
识别停车位
泊入车位
泊出车位
驶出停车场
那么所有的功能就基于以上五个场景需求的出发,按照人和车的距离分为:
人在车上泊车。
人在车可视范围内泊车。
人远离汽车自主泊车。
这样的组合可以演化出各种泊车功能组合。但显然如果人远离汽车自主泊车,按照SAE的自动驾驶等级肯定是L4以及以上。
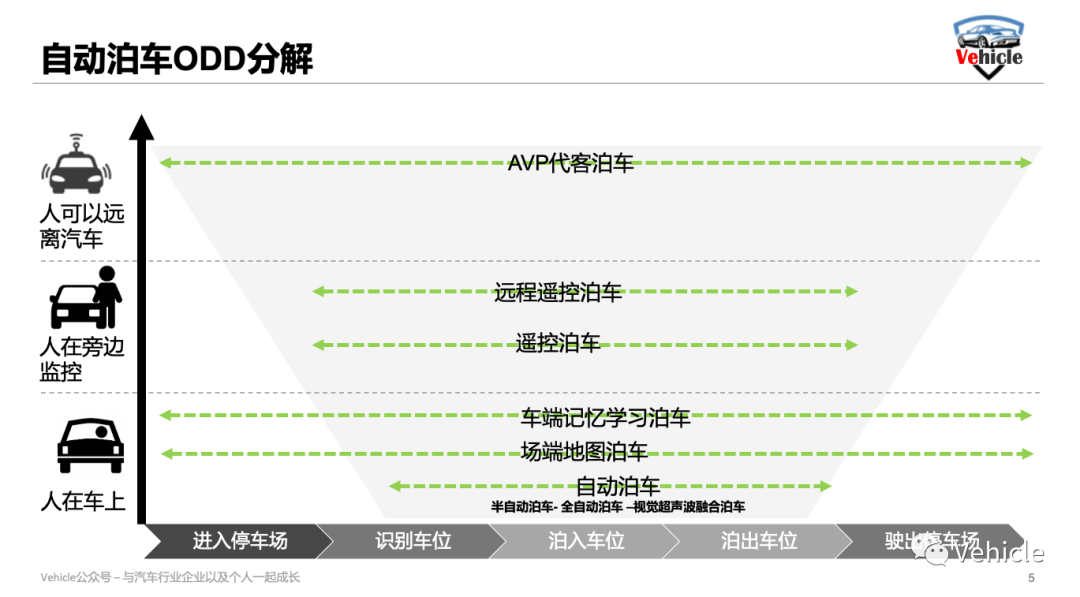
所以目前基本上所有关于泊车的功能都集中在人在车上或者人在旁边监控,泊车和行车一样,当前很少愿意跨过L2这个坎,但是大家都在积蓄等法规完善或许都是直接跳跃进去L4以上。
泊车技术的发展路径
目前对于泊车功能,最先开始发展,也相对成熟的功能是识别车位,泊入车位。一般发展路径分为:
超声波感知泊车,他只能泊旁边有车,或者两个车中间的停车位。他根据超声波识别预估旁边的参考车从而泊车。目前绝大部分外资品牌的车辆,不论豪华还是经济型到文章发表为止依然是这样的泊车功能,所以这也就给了国内不少创业机会,例如最近上市融资的纵目科技就是靠泊车技术。 另外还有泊车的自动与半自动,在燃油车时代很多换挡以及制动执行器是机械的,但泊车需要更换前进和倒退的档位,所以存在自动泊车只能辅助转向但换挡和刹车依然需要驾驶员更换。但到了电气化时代这些问题基本解决,所以绝大部分都全自动泊车。
视觉融合感知泊车,他基于视觉人工智能车位识别算法,不管是否有参考车,可以识别从垂直,平行,斜向,甚至自创车位(比亚迪汉的泊车可以自创车位)进行泊车。目前新势力以及国内主机厂基本都采用此类,或者走向此类泊车。
以上两个为泊车主流方案,但还有一些细小的问题,就是泊车的方向,当前国内泊车基本为车尾泊入,未来是否需要支持车头泊入也是开发在探讨的。 通过以上功能需求可知道,此时泊车的硬件需要超声波和视觉传感器信息进行融合处理,那么这个时候由超声波和视觉传感器融合输入处理的硬件也就组成了当前主流的泊车硬件2.0。 当然有泊入就还有泊出车位,目前能支持泊出的也不少,但更多的泊出是直行几米,也就是把车头开出来。另外一种高级的泊车是车辆能够泊出整个车位而且与道路平行,需要达到这种方式,那么泊车硬件2.0显然无法实现,因为泊车所需要的路径空间必须要足够大才能够进行路径规划。所以从这里开始萌芽了泊车硬件3.0开始使用整车的其他零部件例如通讯,其他传感器等。
遥控泊车,遥控泊车基本上通过蓝牙,蜂窝数据,UWB等无线通讯方式与车辆通讯交互实施指令控制,遥控泊车经历三种阶段:
遥控玩具型前后左右控制,很早之前的BYD采用过这种,典型的就是钥匙还带一个遥控,但这种方式应该没有跟进和继续发展的。
前后移动遥控泊车,基于泊车1.0硬件配置,手指持续按压app按钮进行前后移动,当前主流都为这种还有特斯拉的召唤summon功能。
驾驶员在车上识别车位之后,人下车进行遥控泊入车辆,但不支持泊出,理由和上段一样。
最后一种泊车就是从进入停车区域开始自动,搜寻车位,泊入车位的方式。这里就会存在两个分支:
一个是人需要在车上也就是我们目前正在发展的L2+泊车例如小鹏等的记忆学习泊车,百度重场端和云端地图的泊车。
另一个是人毋需在车上的,自主进入停车场,泊车,泊出,离开停车场也就是AVP,这种属于L4级别,目前更多的是重场端概念开发。
但这两个分支比较明显的界限就是SAE的自动驾驶等级标准以及围绕这个等级标准的功能开发和追责定义,底层技术方案目前没看到多大差异,都是基于单车智能或者重场端方案开发。此时对于泊车硬件却不那么明显了,进入泊车硬件3.0时代也就是不会严格区分泊车硬件进行行车和泊车融合一体,也就是当前热词“行泊一体”,同时调用所有传感设备,使用大算力芯片。
下面分享两个目前技术路径:
记忆泊车(HPP)是当前比较火的一个泊车技术,它在全自动泊车基础上,可在相对更远距离和更复杂环境中自主完成泊入和泊出操作。当前的记忆泊车主要建立在(Simultaneous LocalizaTIon and Mapping,即时定位与地图构建)技术基础之上,主要有VI-SLAM,利用Vision 视觉和InerTIal惯量传感器也就是IMU,学习、记录并储存用户常用的下车位置、停车地点及泊车行进轨迹,建立常用泊车路径的环境特征地图,车辆再次经过该地点时,系统将复现用户的泊车路径来代替驾驶员完成停车场内最后一段距离的低速驾驶和泊车。 目前记忆泊车有几大技术难点,基于摄像头的视觉特征的抓取算法,记住地点的特征信息,地面复杂的光线和更多变的环境很难让摄像头抓住。所以记忆泊车目前更多的是在地下停车场,例如小鹏的记忆泊车;或者是非常短距离的地面学习泊车例如欧美基于法雷奥方案的50m记忆泊车。 另外,记忆泊车的路线是靠GPS地点记忆和IMU轨迹记忆的,而两者结合的丢失GPS信号的记忆精度在2km左右。所以记忆泊车一般都在2km之内,要不然车辆位置无法保证。 当然目前更多传感器的加入,例如激光雷达辅助构建特征地图以及定位。可以实现长距离记忆以及地面泊车,典型的就是类似于高仙机器人开发的地面扫地机器人技术,华为提供方案的极狐和阿维塔前面三个激光雷达的方案。当然有激光雷达加入的泊车方案,更恐怖的是每个车都可以扫地图构建地图,未来是不是可以众包停车场地图也是一个方向。
那么自主泊车还要讨论的一个问题就是高精度充电泊车,未来如果自主泊车对于电动车来讲自动充电也会是个问题,所以精确到厘米级的高精准定位会是一个需要考虑的问题。 泊出停车区域的这种功能目前鲜有,基于场端的泊出停车区域有,例如百度在威马上的方案。单车智能例如小鹏和大众等目前都没有看到逆向的泊出停车场的功能,希望大家留言交流为什么,技术难点,还是无应用需求? 另一个比较特殊泊出功能是特斯拉的智能召唤smart summon功能,基于地面GPS和泊车传感器的导航功能,他的召唤距离在距离用户手机65米之内,最大行驶距离145米,而且需要用户时刻保持视线的监控。这项功能在北美等可能适用,在中国城市地下停车场多的地方难以适用。 总结 自动泊车相关类的功能,很多人都说是“伪需求。欧美汽车也确实秉承了这个观念,所以可以看到当前外资品牌的泊车功能,绝对部分只能泊旁边有车,或者两个车中间的停车位。但是对于泊车,我们开始看到目前国内品牌应用以及供应链在这方面开始引领也看到了外资品牌在这方面的规划布局,所以泊车国内的技术以及供应链还是很有潜力。 另外一点是通往全自动驾驶的道路,总不能缺少自动泊车,要不然点对点只能是路对路而缺少了闭环。 当然目前对于泊车方面的供应链,国内完善也竞争相对激烈例如有德赛西威,百度,纵目,魔视,禾多,智华科技等等。但还以不少行泊一体的方案例如华为,freetech,东软等等在行车方面做的供应链。 但目前还在白家争鸣的时代,市场大,技术路线没有统一,很多机会。









