德赛西威从自动驾驶控制器,目前也开始往其他传感器领域渗透。毫米波雷达作为智能驾驶中的关键组件,也是一个重要的部件,我们从德赛西威生产的SRD2913/18型号毫米波角雷达传感器来机械能解析。
Part 1
产品外观与方向定义
SRD2913/18毫米波角雷达传感器设计紧凑,安装在车辆的四个角落,分别是前左、前右、后左和后右。每个雷达传感器在硬件和软件上完全相同,通过安装时的PIN11和PIN12地址位识别,自动适应方向。
高位安装时需要接地,低位安装时则不需要。系统主要由四个雷达组成,每个雷达都有相应的支架。系统的其他组成部分包括音频(无碟导航/DVD)、面板、外后视镜、内线束以及侧围连接板。
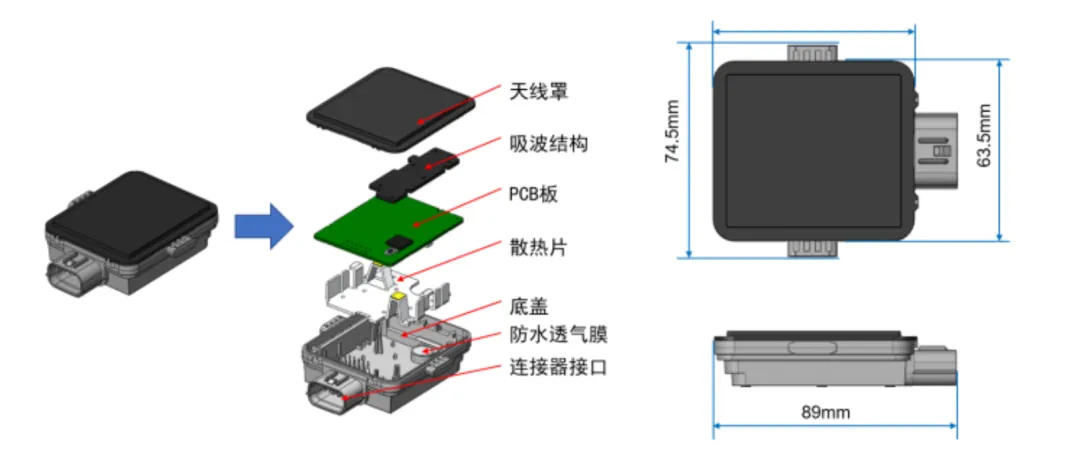
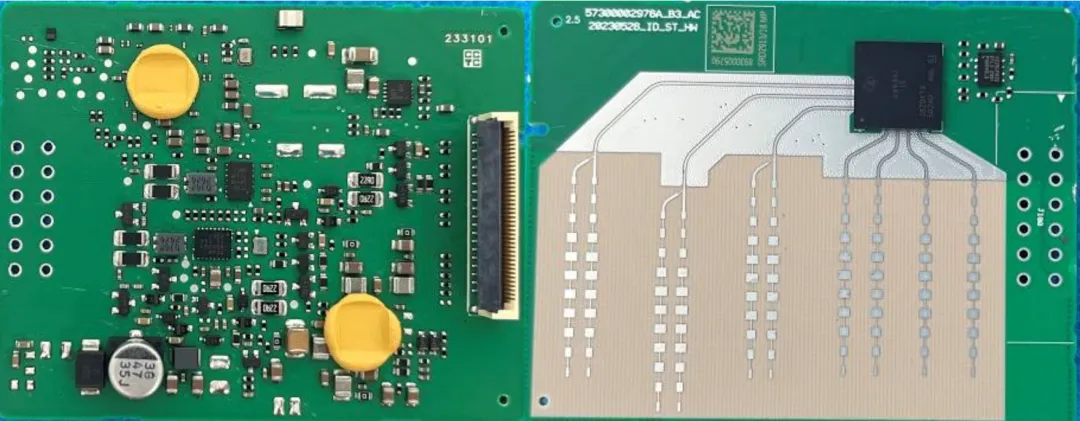
● 爆炸视图与功能列表
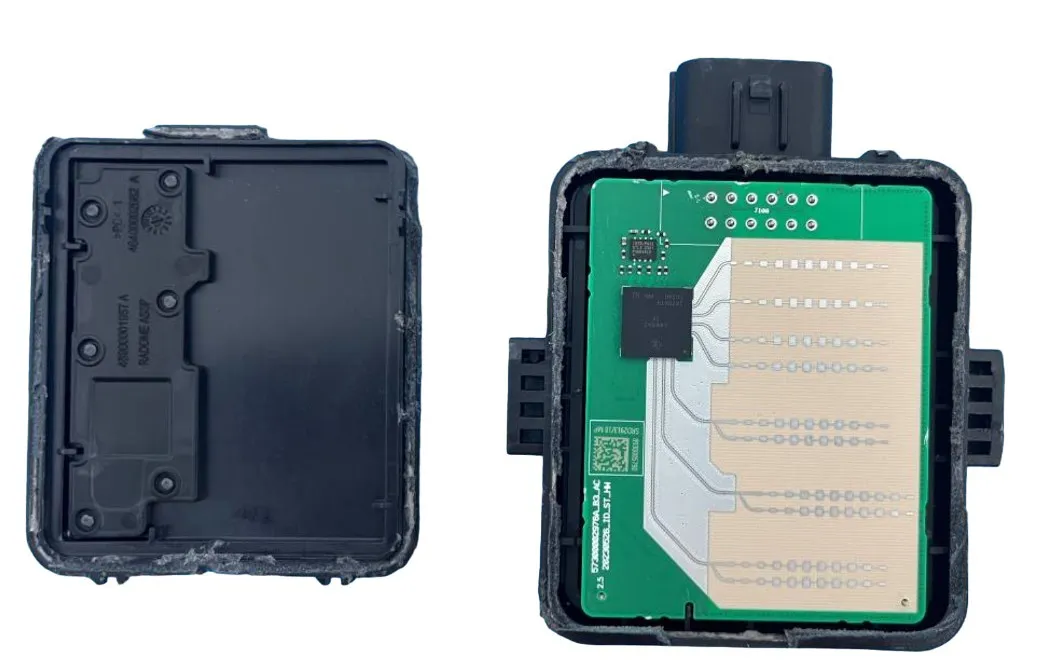
雷达的结构分解图从上到下依次为:天线罩、吸波材料、PCB板、散热片、底盖、防水密封膜和连接器接头。
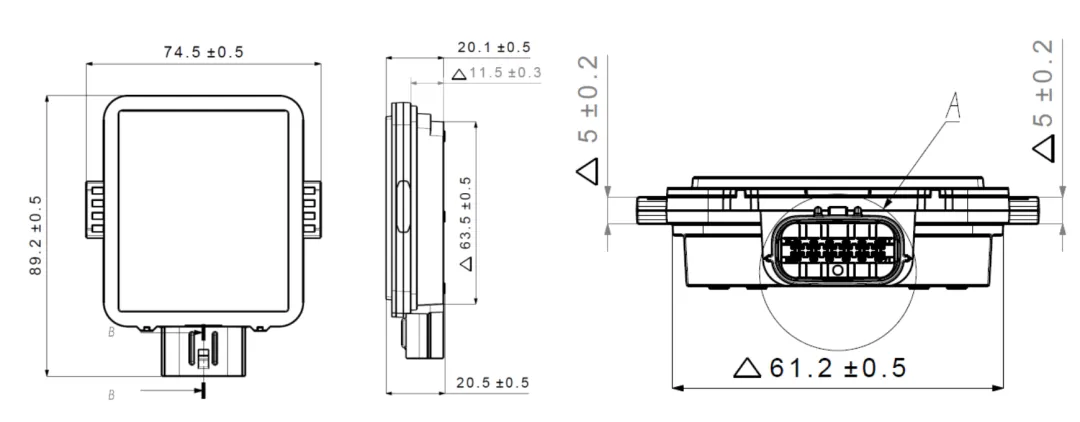
◎ 尺寸:74.5mm x 89.2mm x 20.1mm
◎ 重量:71g
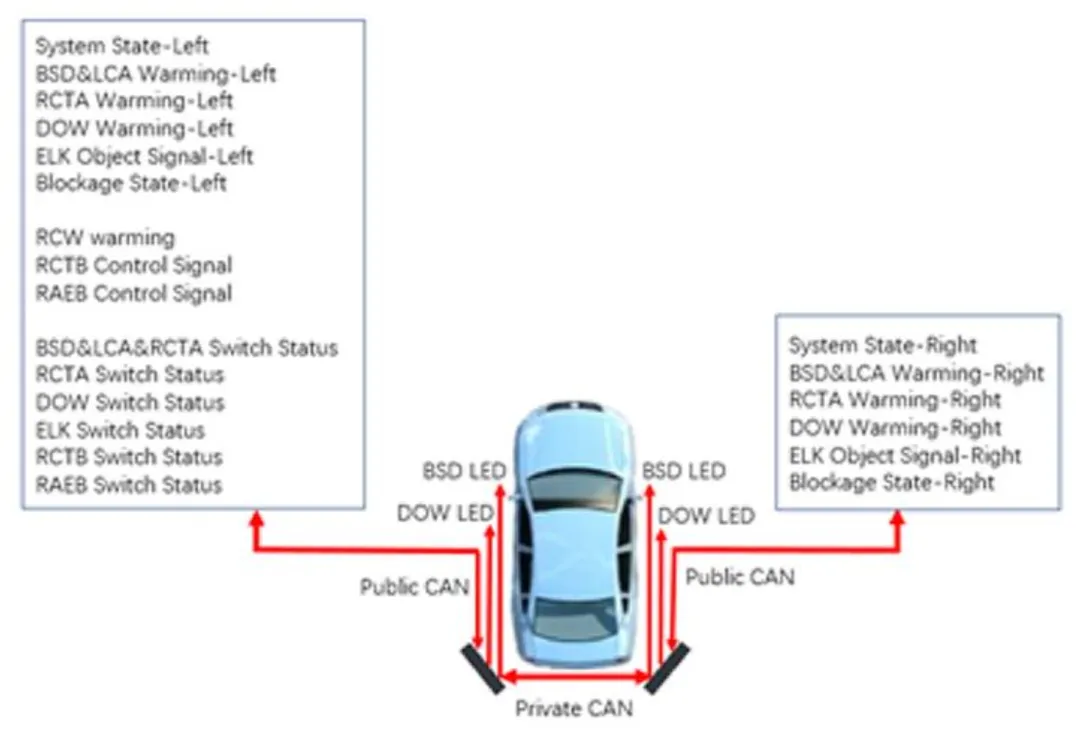
● 功能列表:BSD(盲区监测系统)、LCA(车道变更辅助)、RCTA(后方交叉交通警报)、RCTB(后方交叉交通制动)、RAEB(后方自动紧急制动)、DOW(开门警告)、RCW(后方接近警报)和ELK(紧急车道保持)。
左、右雷达通过公共CAN输出系统信息、BSD/LCA/RCTA/DOW报警信号和ELK目标信息。RCTB/RAEB/RCW报警信号及各功能的开/关状态信号由左雷达融合左右雷达信息后,通过私有CAN输出到公共CAN。
连接器定义如下:
CAN1_H、CAN1_L、CAN2_H、CAN2_L:用于CAN总线通信
GND:接地
Battery:电源输入
BSD、DOW:特定功能信号
ADDRESS1、ADDRESS2:地址位识别
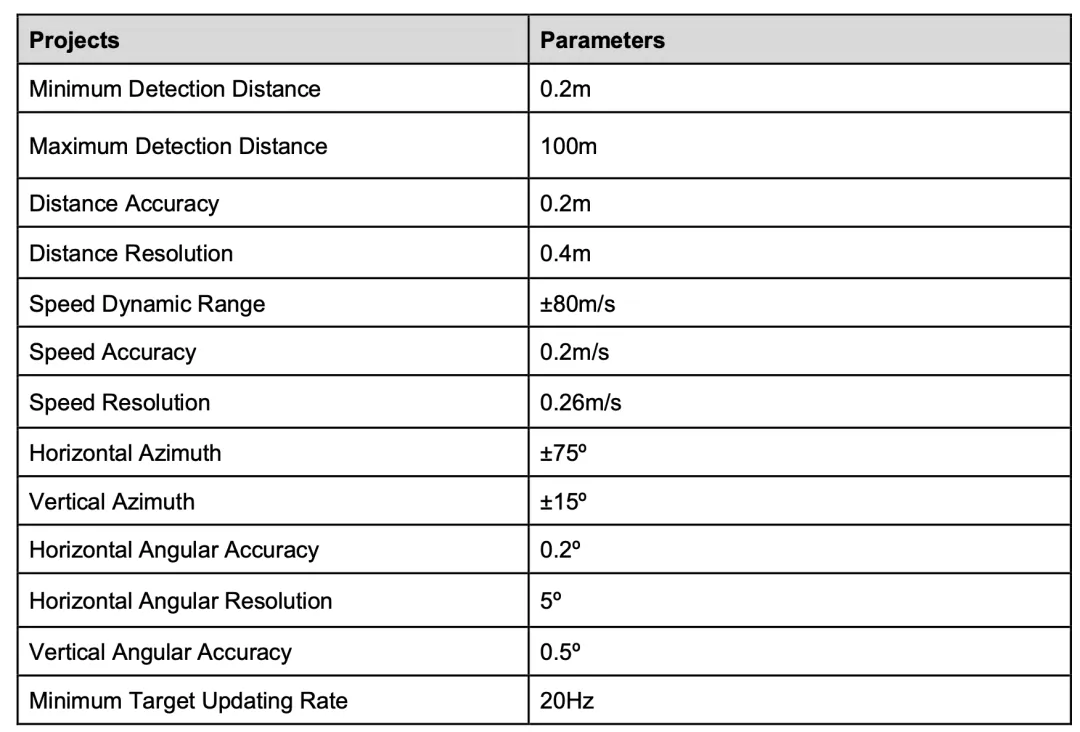
● 功能参数
最小检测距离:0.2m,最大检测距离:100m
距离精度:0.2m,距离分辨率:0.4m
速度动态范围:±80m/s,速度精度:0.2m/s,速度分辨率:0.26m/s
水平方位角:±75º,水平角度精度:0.2º,水平角度分辨率:5º
垂直方位角:±15º,垂直角度精度:0.5º
最小目标更新率:20Hz
Part 2
基本芯片的情况
这颗雷达主要围绕AWR1843,TI AWR1843是一款集成式单芯片调频连续波(FMCW) 雷达传感器,可工作在76至81 GHz的毫米波频带下。此单片系统采用TI的RFCMOS 工艺制成,具有三个发射(TX) 通道和四个接收(RX) 通道,以及内置锁相环(PLL) 和模数转换器(ADC)。
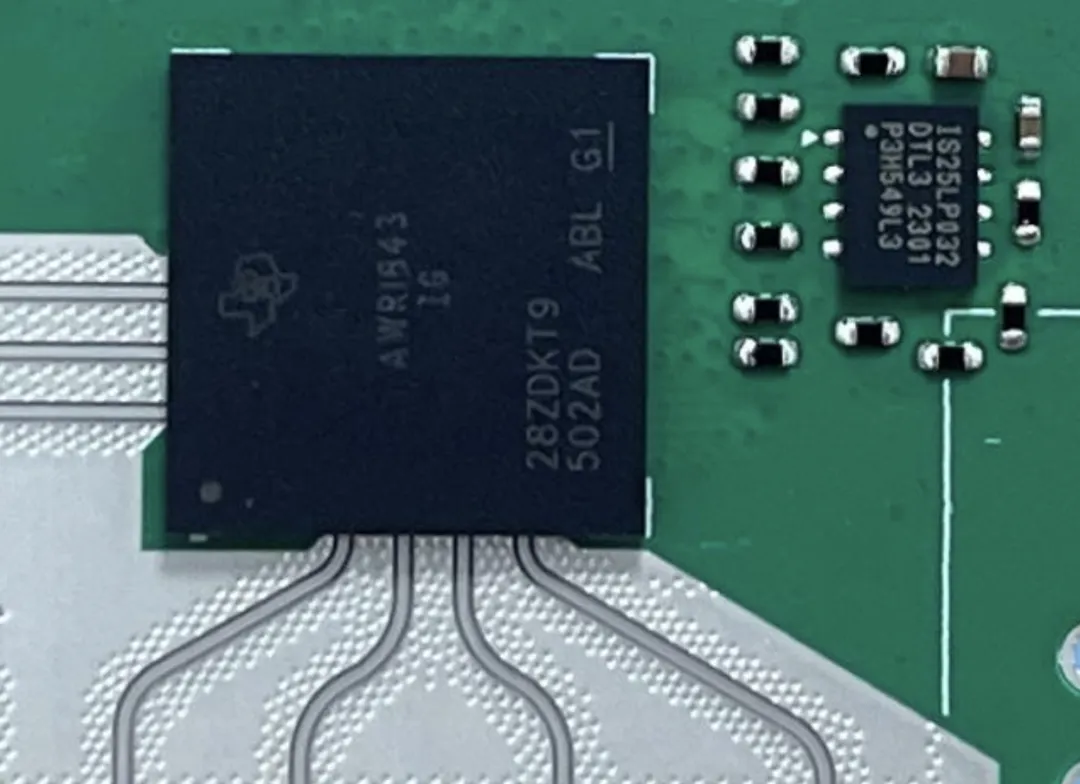
主要的芯片包括DCDC,采用了TPS62065,PMIC芯片为LP87702K,与之匹配的芯片是LM61436。
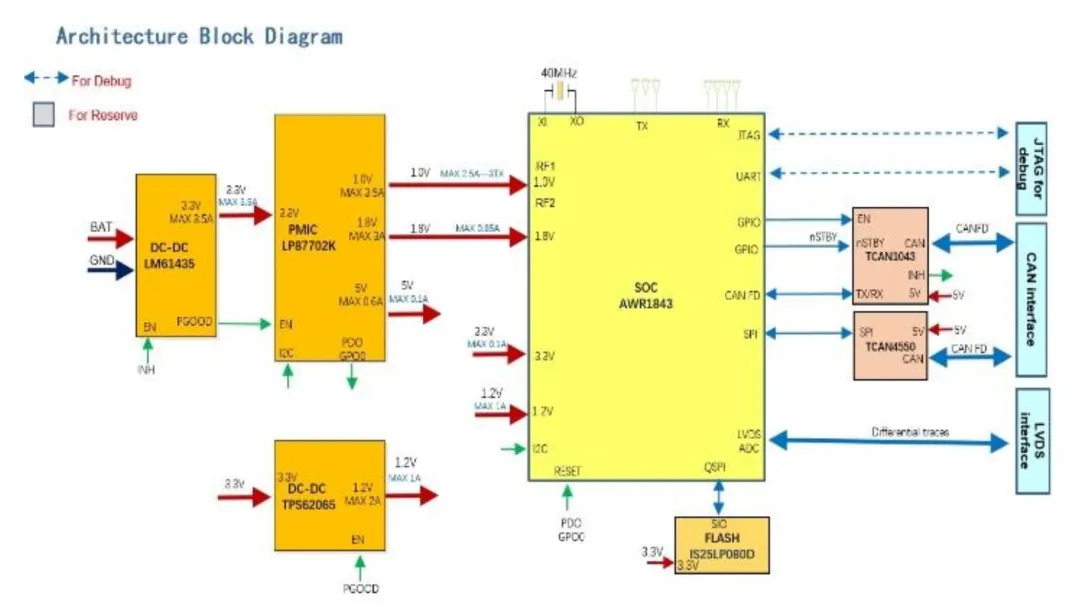
通信芯片采用了1043和4550。
小结
这颗毫米波雷达采用国内很常见的方案,目前价格已经拉到非常低的价格区间。