增量式PID算法在c代码部分的实现过程
下经常会用到对温度控制,适度控制,转速控制等需要自动控制相关的操作,因此在使用中需要不断提高对自动控制 原理部分的学习,一个好的自动控制系统包含三个 主要因素:稳,快,准。稳即系统的稳定性,快即系统的快速性,准即控制的准确性。
在自动控制中比例增益,积分时间,微分时间三个主要变量。下面就这三个变量进行动态展示。
如上图所示,假设在单位阶跃响应下,比例控制幅值,kp越大值越高相关的,积分时间控制精确度,数值越大波形超调量越大,微分时间控制波形的平缓程度。
下面贴出增量式PID算法在c代码部分的实现过程。
//实现增量式PID算法
#include "stdio.h"
void pid_init();//PID参数初始化
float pid_realise(float speed);//实现PID算法
struct {
float set_speed;//设定速度
float actual_speed;//实际速度
float error;//偏差
float error_next;//上一个偏差
float error_last;//上上一个偏差
float kp,ki,kd;//定义比例,积分,微分参数
}pid;
int main()
{
pid_init();
int count = 0;
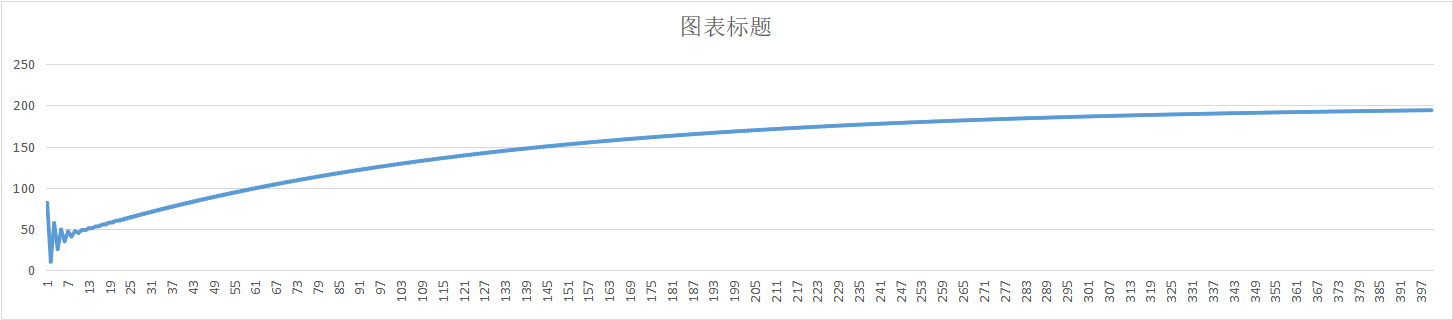
while(count<400)//进行400次 PID 运算,使初始值从0开始接近200.0
{
float speed = pid_realise(200.0);//设定值设定为200.0
printf("%fn",speed);//输出每一次PID 运算后的结果
count++;
}
}
void pid_init()
{
pid.set_speed = 0.0;
pid.actual_speed = 0.0;
pid.error = 0.0;
pid.error_next = 0.0;
pid.error_last = 0.0;
//可调节PID 参数。使跟踪曲线慢慢接近阶跃函数200.0 //
pid.kp = 0.2;
pid.ki = 0.01;
pid.kd = 0.2;
}
float pid_realise(float speed)//实现pid
{
pid.set_speed = speed;//设置目标速度
pid.error = pid.set_speed - pid.actual_speed;
float increment_speed;//增量
increment_speed = pid.kp*(pid.error-pid.error_next)+pid.ki*pid.error+
pid.kd*(pid.error-2*pid.error_next+pid.error_last);//增量计算公式
pid.actual_speed+= increment_speed;
pid.error_last = pid.error_next;//下一次迭代
pid.error_next = pid.error;
return pid.actual_speed;
}
运行数据得到图标如下 :
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。