深度解析华为CCA汽车域控制器
一、汽车E/E架构不断升级,华为CCA架构指引未来发展趋势。
1)ADAS功能升级导致算力需求提升。智能汽车时代,传统分布式ECU架构无法满足日益增长的算力需求,开始向“功能域”集中。
2)“软件定义汽车”背景下,OTA升级需要软件实现SOA架构。传统分布式软件架构难以进行软件快速迭代升级,需要通过SOA架构实现新的软件框架。
3)传统CAN/LIN总线向以太网升级,满足传输带宽及通信协议。以太网高带宽适合智能化时代大数据传输的需求,成为下一代车载主干网络的首选。支持的SOME/IP通信协议,能够很好支持SOA面向服务的软件架构。
4)算力需求+SOA软件架构升级推动“功能域”集中趋势,“Zone”区域控制成为重要组成。5)华为推出CCA架构:“功能域”+“区域”集中,指引E/E架构未来发展趋势。
二、“功能域”集中趋势下域控制器需求提升,“Zone”区域控制器导致机电一体化产品向标准化智能执行器演进。
域控制器主要需求增量来自自动驾驶域/智能座舱域/车身域/底盘域。其中,1)自动驾驶域单车价值量最高,价值量超过万元,后续渗透率加速提升;2)智能座舱域因为不涉及行车安全,渗透率提升速度高于自动驾驶域控制器;3)车身域控制器在原有BCM的基础上进一步集成相关控制器功能;4)底盘域控制器集成驱动/转向/制动等底盘执行功能,统一实现整车运动控制,它的出现为自主底盘执行单元供应商提供新的机会。“Zone”区域控制器将就近接入的控制器算法上提,机电一体化产品向智能执行器转变。
三、电动智能化趋势下,域控制器和执行端控制器同步增长。
电动智能化趋势下,主流主机厂下一代电子电气架构在未来1-2年推出,消费者对于自动驾驶/智能座舱以及功能不断迭代的需求推动四大域控制器渗透率提升。而电动智能化带来的升级趋势,会驱使车灯控制器、电动水泵控制器、电磁阀控制器、电动压缩机控制器以及智能底盘执行单元等渗透率持续提升。
域控制器市场规模在2025/2030年达到1087/2307亿元,自动驾驶域控制器市场规模468/1240亿元,智能座舱域控制器市场规模292/620亿元,车身域控制器市场规模234/198亿元,底盘域控制器市场规模94/248亿元。执行端控制器数量不断提升,2025/2030年市场规模为274/318亿元。
1.1. ADAS 功能升级导致算力需求提升
驾驶辅助功能快速提升,分布式架构向“功能域”集中式架构演进成为趋势。传统分布式 ECU 在汽车电气化、智能化时代因为驾驶辅助功能快速的提升,面临着巨大的 挑战。
1)各个 ECU 之间算力无法协同,相互冗余,产生极大浪费;
2)大量的嵌入式 OS 及应用代码由不同的 Tier 1 提供,语言和编程风格迥异,导致难以统一维护和 OTA 升级;
3)分布式架构需要大量内部通信,导致线束成本增加并加大装配难度。因此,分 布式架构向“功能域”集中式架构演进成为趋势。
1.2. “软件定义汽车”背景下,整车 OTA 需要 SOA 架构升级
相较于传统汽车,整车 OTA 为汽车注入新的活力。在“软件定义汽车”时代,OTA (Over The Air)空中下载能够满足智能汽车软件快速迭代的需求,避免传统汽车每次更 新都需要去 4S 店,从而导致效率低下的问题。可以不断给客户开启新的功能,不断优化产品体验,吸引客户。
传统分布式 ECU 软硬件架构,整车 OTA 效率低下。在传统的分布式 ECU 架构下,有以下几个问题:1)ECU 众多,且由不同的供应商进行开发,软件框架不同,外部开发者难以对 ECU 进行编程更新。2)通过 CAN/LIN 总线进行通信,信号收发关系和路 由信息静态固定,各 ECU 周期性发出各种信号,通过网关进行转发,若更新信号配置,需要同步修改网关配置。3)控制器之间信号嵌套,单个控制器升级需要将所有信号相关控制器全部升级,工作量指数上升。
为实现“软件定义汽车”,SOA 架构成为新的趋势。SOA(Service-Oriented Architecture) 面向服务架构,一种架构设计思想,将应用程序的不同功能单元(称为服务),通过这些服务定义良好的接口和契约联系。SOA 要求各个控制器将能力以服务的方式提供,不同的服务以原子化的方式存在,互相间能够进行动态的订阅/发布关系。
在中央计算电子电气架构下,通过以太网通信方式,把各个控制器提 供的功能按照服务的维度进行拆解成原子状态,重新组合实现不同的组合服务或者流程服务。优点包括:1)软硬件分离,降低开发难度;2)灵活部署软件,功能重新分 配;3)服务间低耦合,互相无依赖,易于维护;4)服务间通信接口标准化,不依赖于平台实现功能。能够在硬件可升级的前提下,通过硬件升级来拓展原子服务的功能 范围,比如增加流媒体后视镜硬件,增加了流媒体后视镜服务,可以将流媒体后视镜 服务与倒车影像服务结合,将倒车影像在流媒体后视镜上呈现出来。
分布式电子电气架构
框架标准/硬件架构/通信协议配合实现 SOA 架构升级。SOA 在互联网 IT 行业有较 成熟的应用,但因为框架标准、硬件架构以及通信协议等方面的原因,SOA 架构理念之前在汽车行业未能得到较广泛的推广。在智能电动化趋势下,逐渐成为整车架构下一代的升级方向。
1.3. 框架标准增加:AUTOSAR 联盟推出 Adaptive AutoSAR 标准
AUTOSAR(AUTomotive Open System ARchitecture)是一个由整车厂,零配件供应商, 以及软件、电子、半导体公司合起来成立的组织。其成立于 2003 年 7 月,核心成员由宝马、戴姆勒、大陆、西门子、大众、丰田、福特、PSA、博世 9 家公司构成。为汽车 E/E(电子电气系统)架构建立了一种开放式的行业标准,以减少其设计复杂度,增加其灵活性,提高其开发效率。成立至今的近 18 年时间里,得到了越来越多的行业认可。目标主要有三个:1)建立分层的体系架构;2)为应用程序的开发提供方法论;3)制定各种应用接口规范。
1.3.1. Classical AUTOSAR 标准面向传统 ECU
在最初的汽车 ECU 开发中,存在着几大痛点:
1)传统的汽车 ECU 的嵌入式系统 不支持硬件抽象;
2)分布式 ECU 由不同的供应商提供,采用不同的软件代码,互相通信困难并且软件可移植性差;
3)软件复用性差,而车辆的寿命往往长于 ECU 的寿 命,当硬件更换后,软件往往需要推倒重写。
基于以上痛点,AUTOSAR 联盟推出了 Classical AutoSAR 标准,将 ECU 的开发流 程、文件交换格式以及内部的代码规范和书写进行标准化。通过建立不同的软件层级,将硬件接口抽象化、驱动程序抽象化、操作系统抽象化,最终通过 RTE 中间件来实现上层应用间、应用与底层软件之间以及不同 ECU 的上层应用之间通信。
AUTOSAR 将软件分为四层,最上层是 Application(应用层),接下来是 RTE 层、 基础软件层(BSW)和微控制器硬件层,BSW 层又进一步细分成:1)控制器抽象 层(MCAL);2)ECU 抽象层;3)服务层;4)复杂驱动层。
MCAL 的功能是设置硬件驱动,将控制器、内存、通信、I/O 口等硬件功能的驱动 进行设置,屏蔽不同的芯片资源;ECU 抽象层,给控制器抽象层提供抽象接口,屏蔽具体的控制器的型号;服务层是 BSW 的最高层,主要运行标准化的操作系统,提供计时器、状态管理等服务;复杂驱动层为某些高要求的应用提供直接与硬件交互的通 道,如发动机爆震控制、曲轴转角控制、节气门控制等等。
运行环境 RTE 是 CP 标准的核心组成部分,虚拟功能总线(Virtual Function Bus, VFB)的接口具体的实现,为应用程序组件通信提供基本服务。在应用层中各个组件间不允许直接通信,由 RTE 封装好下层通信基础软件之后,为上层应用层提供通信所需 API 接口。RTE 可以实现的功能:1)应用层软件组件(SW-C)之间通信;2)应用层 SW-C 与 BSW 之间的通信;3)不同 ECU 的 SW-C 之间的通信。
应用层由多个模块化的软件组件(SW-C)组成。每个 SW-C 都封装了各种应用的功能 集,用于实现汽车控制的功能。与非 AUTOSAR 架构的车载软件不同的是,由于通过 RTE 将 SW-C 与底层硬件和操作系统等完全的解耦,SW-C 不依赖硬件,即使搭载于不同的 ECU上,代码依然可以被重复利用。
1.3.2. Adaptive AUTOSAR 标准面向高性能 ECU
Classical AutoSAR 标准(CP)解决了传统的嵌入式 ECU 开发的需求,但是在汽车智 能化时代,高级自动驾驶功能需要在车辆上引入高度复杂和计算资源需求量大的软件,CP 标准无法满足 ADAS 控制器相关的需求。在算力大幅提升的需求拉动,与以太网技术发展&多核异构高性能处理器技术的驱动下,AUTOSAR 联盟推出满足面向服务 SOA 架构的第二个软件标准:Adaptive AutoSAR(AP)。
AP 不是原有 CP 的升级版本,而是运用 SOA 架构设计思想,面对汽车更加复杂的 功能需求推出的新标准。两者相比,首先 AP 可以适配 64 位及以上的高性能芯片,而 CP 只能适配 32 位及以下微控制器;其次 CP 中的 RTE 仅支持静态通信,在程序发布时,已经确定通信源和目标,不支持通信的动态重新配置,通信协议主要是“面向信号”的 LIN/CAN 架构。AP 中的通信模块 ara::com 为 Application (服务)间的通信提供接口, 自身包含的 SOME/IP 通信协议属于“面向服务”架构,支持服务发现、数据的动态 发布/订阅机制,能够实现不同的应用像电脑上的软件一样动态升级、卸载。
AP 具有如下的特点:1)软实时性,具有毫秒级的最后期限,即使错过最后期限不会造成灾难后果;2)具有一定的功能安全要求,可以达到 ASIL-B 或更高;3)更适用于多核动态操作系统的高资源环境。与 CP 相比,虽然 AP 实时性有所降低,在保证一定功能安全等级的基础上,大大提高了对高性能处理能力的支持,支持智能互联应用功能的开发。
1.4. 硬件架构/通信协议升级:CAN/LIN-》以太网,面向信号-》面向服务
1.4.1. 数据传输速度需求推动车身网络向以太网进化
自动驾驶需要以更快速度采集并处理更多数据,传统汽车总线无法满足低延时、高吞吐量要求。随着汽车电子电气架构日益复杂化,传感器、控制器和接口越来越多,自动驾驶需要海量的数据用于实时分析决策,要求车内外通信具有高吞吐速率、低延时和多通信链路。在高吞吐速率方面,LIDAR 模块产生约 70 Mbps 的数据流量,一个摄像头产生约 40 Mbps 的数据流量,RADAR 模块产生约 0.1Mbps 的数据流量。若 L2 级自动驾驶需要使用 8 个 RADAR 和 3 个摄像头,需要最大吞吐速率超过 120Mbps,全自动驾驶对吞吐速率要求更高,传统汽车总线不能满足高速传输需求。
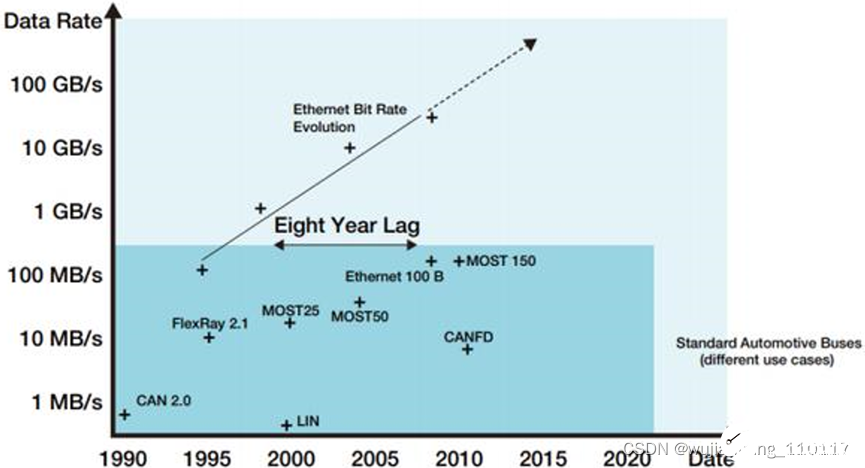
集带宽更宽、低延时等诸多优点的以太网有望成为未来车载数据传输骨干网络。车 载以太网(Ethernet)是汽车中连接电子元器件的一种有线网络,具有带宽较宽、低延时、 低电磁干扰、低成本等优点。传统以太网在 1990 年就已经发布,需要 2-4 对双绞线进行 传输,且抗电磁干扰能力较弱,难以在汽车上大量推广,宝马率先应用以太网技术,在 2008 年的宝马 7 系上,装备了一条从 DLC 诊断端口到网关的 100Base-Tx 以太网,用于 诊断和固化软件更新。
2011 年,Broadcom(博通)、NXP、BMW 成立 OPEN Alliance 联盟,到目前已经有 500+成员。2015 年首个车载以太网规范 100Base-T1 发布,仅需要一对双绞线进行传输, 可以减少 70-80%的连接器成本,减少 30%以上的重量,并且能够有效的满足车内 EMC 电磁干扰的要求。随着 1000Base-T1 以及更高带宽 NGBase-T1 以太网标准的不断推出, 以太网有望成为未来智能汽车时代的车载主干网络。
1.4.2. “面向服务”通信协议,支持 SOA 架构升级
SOME/IP 面向服务通信协议,支持 SOA 架构升级。随着以太网不断的普及, SOME/IP (Scalable service-Oriented MiddlewarE over IP)概念开始引入车载网络通信领域, 它 2011 年由 BMW 集团推出,车载以太网的通信中间件,位于 OSI 7 层模型的第 5 层, 2013 年纳入 AUTOSAR 4.1 规范中。传统的 CAN/LIN 总线为主的车载网络中,通信过程是面向信号,信号的发送是根据发送者的需求,不会考虑接收者是否有需求。SOME/IP 不同,在接收方有需求的时候才会发送,这种方法优点在于总线上不会出现过多不必要的数据,降低负载。
在 SOME/IP 协议和以太网的支持下,通信架构和协议支持面向服务的 SOA 架构升级,将各种控制算法、显示功能等应用程序抽象为“服务”,通过 API 接口和中间件 (Middleware)使得所有有需求的任务都可以进行访问。
1.5. 算力需求+SOA 架构推动“功能域”集成,“Zone”区域控制成为重要组成
控制器“功能域”集中成为趋势。在原有的分布式电气架构下,因为汽车智能化功能不断提升导致 ECU 数量不断升级,线束带宽及重量难以支撑继续扩张,分布式 ECU 功能相对简单,设计资源有限,无法支持 SOA 架构下新增功能持续升级和消耗,控制器“功能域”集中成为趋势。
就近接入,扩展灵活,“Zone”区域控制成为整车网络重要组成部分。在“功能域” 集中的基础上,通过 Zone 区域控制器对全车的设备进行就近接入,能够更好的实现硬 件的扩展,减少整车线束长度及成本,成为整车电子电气架构中重要的组成部分。
1.6. 华为推出“计算+通信”CCA 架构,“功能域”+“区域”集中指引发展趋势
1.6.1. 主流车企量产车型推进“功能域”集成,特斯拉率先实现“区域”集成
主流量产车型延续博世 E/E 架构路线,推进“功能域”控制器集成。主流车企量产车型正在从分布式架构向“功能域”集中架构演进,将智能驾驶、智能座舱以及车身域 控制器分别集成。但整车间通信仍然通过 CAN/LIN 等传统总线进行。如大众 MEB 平 台以及长安 CIIA 电子电气架构等。
特斯拉率先实现 E/E 架构变革,实现区域控制器集成。特斯拉在自动驾驶域控制器 和智能座舱域控制器集成的基础上,率先进行区域控制器集成,将车身控制器划分为左、前、右三部分,节点就近接入,集成部分 ECU 功能,但控制器间仍然采用传统汽车 CAN/LIN 总线进行连接。
1.6.2. ICT 技术积累推出 CCA 架构,华为实现电子电气架构最新变革
自身的 ICT 技术为积累,推出 CCA 架构为基础的全栈式解决方案。华为推出全栈式智能汽车解决方案,其中底层的基础是“计算+通信”为核心的 CCA 架构,CCA 架构用 以太环网作为车载通信主干网络,实现了“功能域”+“区域”的集成。
以太环网+VIU 区域控制器构建车内通信架构。整车网络架构设置 3-5 个 VIU,相 应的传感器、执行器甚至部分 ECU 就近接入,实现电源供给、电子保险丝、I/O 口隔离 等功能。VIU 之间通过高速以太网的环形网络进行连接,确保整车网络高效率和高可靠。
基础通信架构+三大域控制器,构建 CCA 架构。在整车通信架构之上,设置智能座 舱域控制器 CDC、智能驾驶域控制器 MDC 和整车控制器 VDC,共同完成娱乐、自动 驾驶、整车及底盘域的控制。
通信领域丰富经验,助力构建以太网通信方案。以太网速率远超传统汽车总线网络, 华为在以太网应用领域有丰富的经验,根据前瞻产业研究院数据,2019 年华为以 39%的市场份额稳居国内以太网交换机市场第一,能够实现网络 0 丢包及数据 μs 级延时,易 于实现整车以太网络搭建及 VIU 区域控制器功能。
2. 全新电子电气架构下,整车的控制器发展趋势如何演变?
2.1. 控制器(ECU):功能控制核心,协助实现各项功能
功能控制中枢,处理输入信号实现功能控制。汽车控制器是实现整车功能控制的关 键器件,一般由 MCU、电源芯片、通信芯片、输入处理电路、输出处理电路等构成,通 过对各类传感器信号、开关信号以及控制信号的处理,来对阀、电机、泵、开关等执行 机构进行控制。
通过整车微控制器能够实现的功能包括:接收信号并解析、逻辑判断、网络通信、 故障诊断和处理、设备地址识别等等。
2.1.1. 整车电子电气功能升级,ECU 数量不断提升
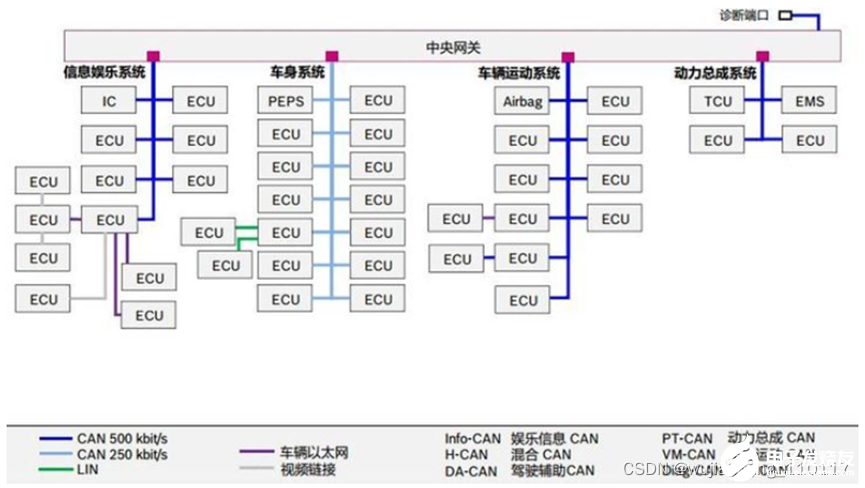
微控制器在传统的车辆中为分布式架构,每增加一个功能需要增加一个 ECU。随着 整车电子电气功能的不断升级,ECU 的数量在不断提升。根据 Strategy Analytics 的数据显示,目前汽车平均采用约 25 个 ECU,但是高端型号 ECU 数量已经超过 100 个。不同的 ECU间,主要采用 CAN/LIN 总线对其进行连接,近年来汽车中 CAN/LIN 总线节 点的数目在不断提升,其中 LIN 总线节点 CAGR 约为 17%,CAN 节点的 CAGR 约为 13%。
以数据诊断接口为中心,分布式 ECU 架构通过不同速率的总线系统将不同的 ECU 进行连接,从而实现不同的功能。
2.1.2. 信号复杂度+控制难度不同,控制器价值量有所区别
信号处理+输出控制难度提升,控制器复杂度不断升级。
1)简单驱动控制器:以油 泵控制器为例,仅需要接收非总线信号并驱动执行机构,价值量约为 10-20 元;
2)拥有 总线诊断通信功能的控制器:以鼓风机控制器为例,需要通过 LIN 总线通信,并拥有诊断功能,价值量约为 40-50 元;
3)实现较为复杂功能控制器:以车灯控制器为例,需要 通过 CAN 总线通信,拥有诊断功能,并需要对冷却风扇、调节电机、灯光进行控制的 较复杂控制器,价值量约为 80-100 元;
4)实现复杂功能控制器:以车身控制器/发动机控制器为例,接收多种信号输入,通过计算决策对于多个执行机构进行控制输出,并拥 有诊断功能,是分布式架构下最复杂的控制器,价值量约为 200-400 元。
2.2. 全新电子电气架构向“功能域”集中,带来域控制器需求提升
“软件定义汽车”时代,需要大算力控制单元。不同于以往的分布式电子电气架构, “软件定义汽车”时代,整车硬件架构向以太网+SOA 架构升级,大算力+软件快速迭代 需求推动分布式 ECU 向域控制器集成。在中央控制计算单元出现之前,整车控制单元 被划分为自动驾驶域控制器/智能座舱域控制器/车身域控制器以及底盘域控制器等。
2.2.1. 自动驾驶域控制器:单车价值量最大
自动驾驶域控制器是功能更新最快,也是最具有集成意义的控制器。通过对摄像头、 超声波雷达、毫米波雷达、激光雷达等传感器信号的融合处理,结合高精地图和导航等 信息,做出自动驾驶决策,并输出整车控制指令。
奥迪 zFAS 引领行业变革,强大运算核心支持首个“域集成”控制器。奥迪是全球 首个实现“域集成”控制器架构的厂商,2018 年推出的奥迪 A8,将所有的驾驶辅助 ADAS 系统中相互分离的 ECU,如自动泊车、车道保持、自适应巡航功能等均融合进入自动驾 驶域控制器 zFAS。其由四块芯片构成,分别是 Mobileye 的 EyeQ3(外界图像感知)、英 特尔的 Cyclone V(传感器数据融合)、英飞凌的 Aurix TC297T(主控通信处理)、英伟 达的 Tegra K1(全景图像融合),四块芯片各有侧重,由德尔福提供硬件集成,TTTech 提供软件开发。zFAS 实现自动驾驶域集成,其余底盘+安全、动力、车身、娱乐四大域 仍然采用分布式架构。
自动驾驶域控制器对于 AI 芯片的算力要求很高,目前一线供应商为英伟达、 Mobileye、华为;二线供应商包括高通、地平线等。国际 Tier 1 开始加速推出自动驾驶 域控制器,如安波福、伟世通、大陆等。国内自主企业也开始推出自身的域控制器产品, 较为典型包括德赛西威采用英伟达 Xavier 芯片方案,给小鹏 P7 车型提供 IPU03 自动驾 驶域控制器,以及华为北汽极狐 αS Hi 版提供 MDC 810 自动驾驶域控制器。
2.2.2. 智能座舱域控制器,不涉及行车安全,集成先行
汽车座舱升级分为几个阶段。
1)60-90 年代为机械时代,座舱产品主要包括机械式 仪表盘及简单的音频播放设备,功能结构单一,基本都是物理按键形式,可提供的信息 仅有车速、发动机转速、水温、油耗等基本信息;
2)2000-2015 年为电子化时代,随着 汽车电子技术的发展,座舱产品进入电子时代,装置仍以机械仪表为主,但少数小尺寸 中控液晶显示开始使用,此外也增加了导航系统、影音等功能,为驾驶员提供较多信息。
3)2015 年开始进入智能时代,以大尺寸中控液晶屏为代表率先替代传统中控,全液晶 仪表开始逐步替代传统仪表,中控屏与仪表盘一体化设计的方案开始出现,少数车型新 增 HUD 抬头显示、流媒体后视镜等,人机交互方式多样化,智能化程度明显提升。但 现阶段大部分座舱产品仍是分布式离散控制,即操作系统互相独立,核心技术体现为模 块化、集成化设计。一芯多屏、多屏互融、立体式虚拟呈现等技术开始逐步普及,核心 技术体现为进一步集成智能驾驶的能力。
目前智能座舱域控制器主要目的是将分别呈现的液晶仪表、液晶中控、HUD、流媒 体后视镜等显示端进行“功能域”集中统一控制,实现“一芯多屏”等功能。国内外 Tier1 厂家纷纷推出智能座舱域控制器产品,包括伟世通的 SmartCore,搭载在广汽埃安 LX 上;德赛西威最新的一芯双屏座舱域控制器产品,已搭载在奇瑞品牌上;延锋科技座舱 域控制器,已经搭载在智己上等。
2.2.3. 车身域控制器,进一步集成 BCM 功能
车身域控制器就是 BCM(Body Control Module)的进一步集成产品,传统的 BCM 将 天窗、车窗、车门锁、车内灯光、座椅、电动尾门、车灯、雨刮、PEPS(无钥匙进入和 启动)等功能的控制进行了集成。
特斯拉作为汽车电子电气架构升级的先锋,在 2019 年推出的 Model 3 上率先对电子电气架构进行了革命性的变革,不仅将驾驶辅助+影音娱乐进行了双域融合,将车身域相关的控制器进行了“区域”集成,通过左(RCM_LH)、前(RCM_FH)、右 (RCM_RH)三大域控制器不仅将原车身域中车窗、车门、座椅、门锁、灯光、雨刮等功 能开关进行了集成,更将空调、热管理、EPB 等模块进行了集成,按照就近原则对节 点进行接入,有效的降低了整车的线束长度、重量、成本以及布线的难度。
车身域控制器的主要功能包括传统 BCM 功能、PEPS(无钥匙进入和启动)、车窗 控制、天窗控制、空调模块、座椅模块等。未来能够在车身域控制器领域能够胜出的Tier1,应该具备以下几个方面的特征:
1)有较强的传统 BCM 开发的经验;
2)能够独立的开发车窗及空调模块;
3)较强的硬件集成能力;
4)软件架构能够符合时代, 最好有 AUTOSAR、SOME/IP 等相关的开发经验;
5)芯片保供能力(公司营收规模)。
2.2.4. “底盘域”控制器集成需求,为自主底盘控制执行单元带来机会
电动智能化时代,底盘控制全面转向线控。电动智能车因为真空源缺失、能量回收 需求、控制灵敏度升级等多种原因,底盘执行单元全面转向 X-By-Wire(线控技术),除电机驱动外,主要包括线控制动及线控转向功能。
相较于传统的底盘执行机构,线控单元单车价值量有明显的提升,线控制动 OneBox 方案单车价值量约为 2000 元,线控转向方案单车价值量约为 3000 元。较传统的底 盘执行机构价值量均提升了一倍左右。
底盘执行机构向线控单元升级,多路径实现制动和转向功能。在传统底盘执行单元升级成线控单元后,制动和转向功能能够通过多路径实现,以制动功能为例,实现目标减速度可以通过驾驶员主动制动、ESC主动建压、电子手刹 EPB 以及动能回收等路径实现。将底盘执行的所有功能集中在更上层的底盘域控制器上进行统一控制,成为提升整车控制效率的发展趋势。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。