新能源汽车的动态路试已经成为检测整车安全性必不可少的测试环节,通过路试,工程师能够发现整车试验中存在的问题,从而进行快速诊断和分析,为新能源整车提供质量保障。
 智能网联汽车的“一日千里”
智能网联汽车的“一日千里”
随着汽车逐步向智能化、网联化、电动化发展,汽车功能和属性的改变导致其电子电气架构越来越复杂,以CAN、LIN总线为主的车载架构逐渐被迭代改进,需要定义和设计新一代的电子电气架构,以满足未来汽车日益增长的新需求。国内OEM逐步进入以车载以太网为主干网的新一代电子电气架构设计阶段,覆盖了车载以太网、CANFD以及LIN总线,日渐适应车载ECU的与日俱增的网络容量需求。
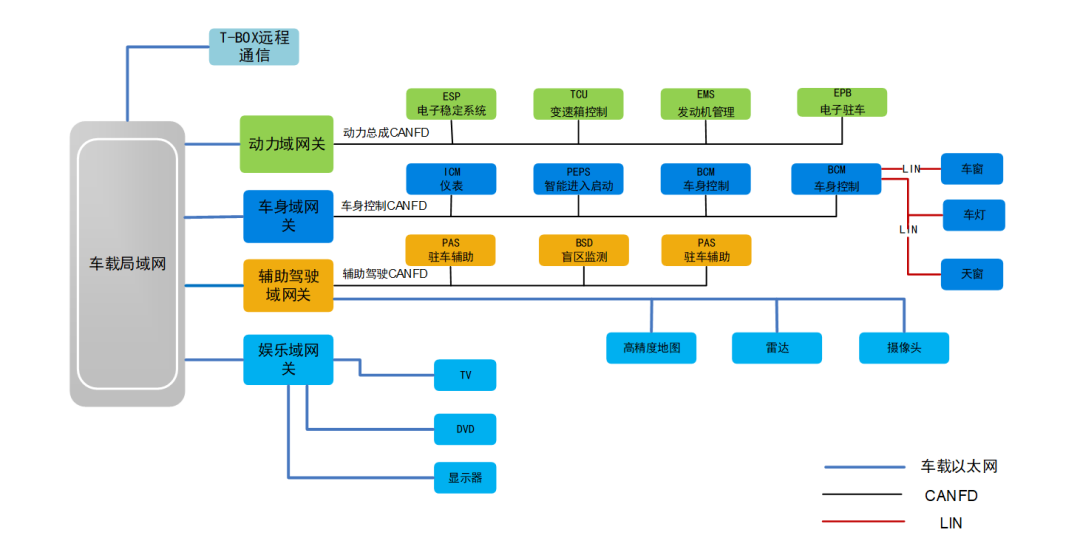
图1新一代智能网联汽车架构图
其中,CAN FD (CAN Flexible Data-rate)是CAN总线最新的升级,具备最长64字节数据,灵活的数据域波特率最高可达5Mbps。LIN作为对CAN总线的补充,则是基于UART/SCI的低成本串行通讯协议,其应用的目的是提供一种低成本的汽车总线,广泛应用在车身控制领域,如方向盘、动力总成、车门和座椅等;车载以太网技术的成熟,更是为车载总线性能的巨大提升进行了赋能,这种连接车内电子单元的新型局域网技术,在单对非屏蔽双绞线上可实现 100 Mbit/s 甚至 1 Gbit/s 的数据传输速率,同时满足汽车行业高可靠性、低电磁辐射、低功耗、带宽分配、低延迟以及同步实时性等方面的要求,在新一代整车架构中将替代CAN总线成为优选网络架构。
车载数据的路试分析和云端监控优势
偶发性故障通常是汽车局域网总线测试中最大的难点,也是工程师最为担忧的隐患点。为了更加准确地定位偶发性的故障,并将当时的情况进行精准地捕捉和记录保存,整车厂都需要对汽车进行长时间路试分析,将车各项性能、技术参数在不同环境及道路进行测试,然而传统的记录方式存在诸多弊端,给工程师的测试增加了时间成本,无法高效地定位和解决问题。
当前的路试方案主要痛点:
整车的测试数据非常多,如何保证数据传输不掉帧;
怎样远程获取车的运行数据,检查车辆状况;
线下解析数据流程繁琐,如何快速分析测试数据;
如何能快速定位故障,排查车辆的故障和隐患;
如何快速便捷升级ECU固件。
基于以上问题,广州致远电子对整个行业推出了新能源汽车路试分析系统方案,该系统为基于ZWS云平台衍生出来的专门管控CANDTU终端的行业应用,实时系统性分析测试数据,提升路试效率。该系统方案具有以下优势:
支持大量数据实时传输解析不掉帧;
支持远程获取历史数据,可召回设备文件;
支持DBC解析,在线可视化曲线分析;
支持车载UDS诊断,规则触发告警,定位偶发性故障;
支持远程在线ECU固件升级。
新能源汽车路试分析系统方案包含通信硬件和应用平台两部分,通信硬件部分可通过车载CAN-bus数据记录仪将数据上传到云端,应用平台则远程管理监测车载CAN-bus并分析CAN数据等,系统方案如图2所示:
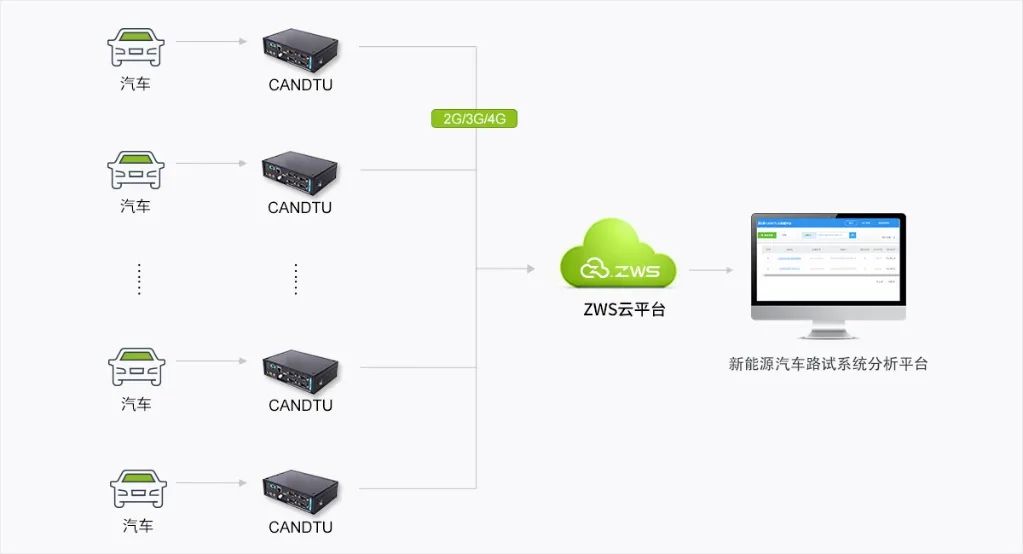
图2路试系统框图
1. 远程获取数据
支持远程在线查看历史数据,可实时召回设备数据文件。

图3远程获取数据
2. 支持车载UDS诊断,实现设备云监控
支持车载UDS诊断,用户可以通过云平台,直接对车辆进行标准的UDS诊断,排查故障。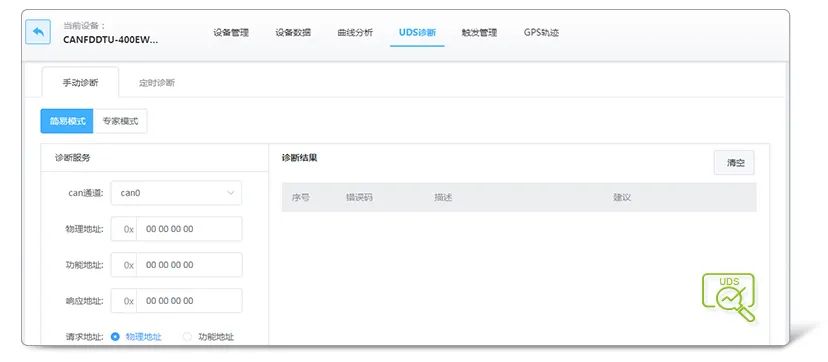
图4云端UDS诊断3. ECU固件升级支持云端远程在线升级ECU固件。
图5云端ECU固件升级
4. 实时云端曲线,提供CAN报文数据可视化分析
导入DBC文件实时的曲线分析,结合丰富多彩的图形控件,可及时进行CAN(FD)数据的可视化展示,以图表形式进行可视化曲线分析。
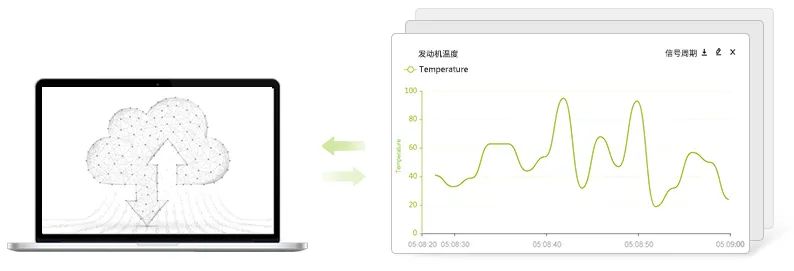
图6实时云端曲线分析
5. 规则触发
支持数据条件触发、错误码触发告警,实时告警通知用户。
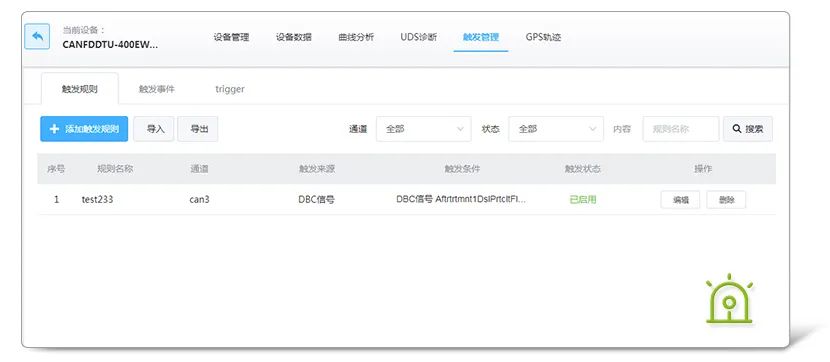
图7规则触发6. 支持北斗/GPS轨迹功能,对设备实时定位监控登陆CANDTU云端,可实时显示设备运行轨迹,加载历史轨迹。带有特色的北斗/GPS定位功能,支持可实时优化轨迹算法,可以实时记录设备位置信息并上传到指定服务器。方便用户在需要设备数据时,快速定位设备,进行算法数据分析优化。

图8北斗/GPS轨迹功能
7. 各通道电气隔离,赋能分域记录
CANFDDTU-400EWGR可同时实现4通道CANFD报文的记录,针对每个汽车功能域实现单通道独立运行,提高记录的丰富性,完美满足汽车分域路试的需求。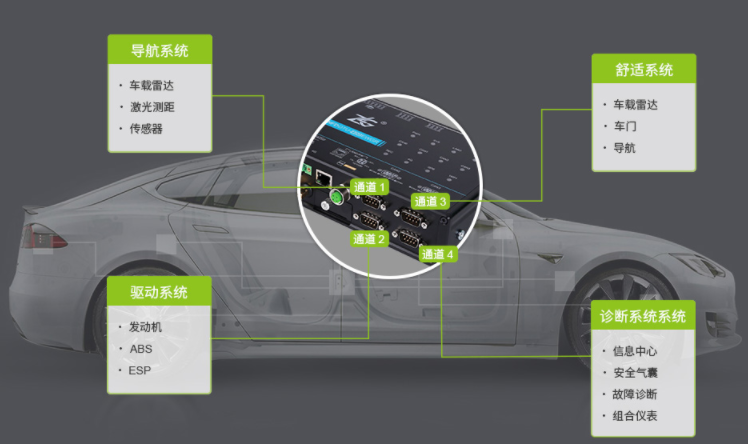
图9汽车功能分域记录