面向车载通信的TSN网络原型(上) | 原型概述
时间敏感网络(TSN)技术是车载网络通信实现高可靠性和低时延的网络通信关键技术之一。TSN协议族非常庞大且复杂,全面理解和掌握这些协议是设计者普遍面临的问题;此外,在车载网络通信领域,汽车行业缺少TSN技术应用的实践经验。因此,相关技术设计应用、测试验证等方法需要进一步探索。
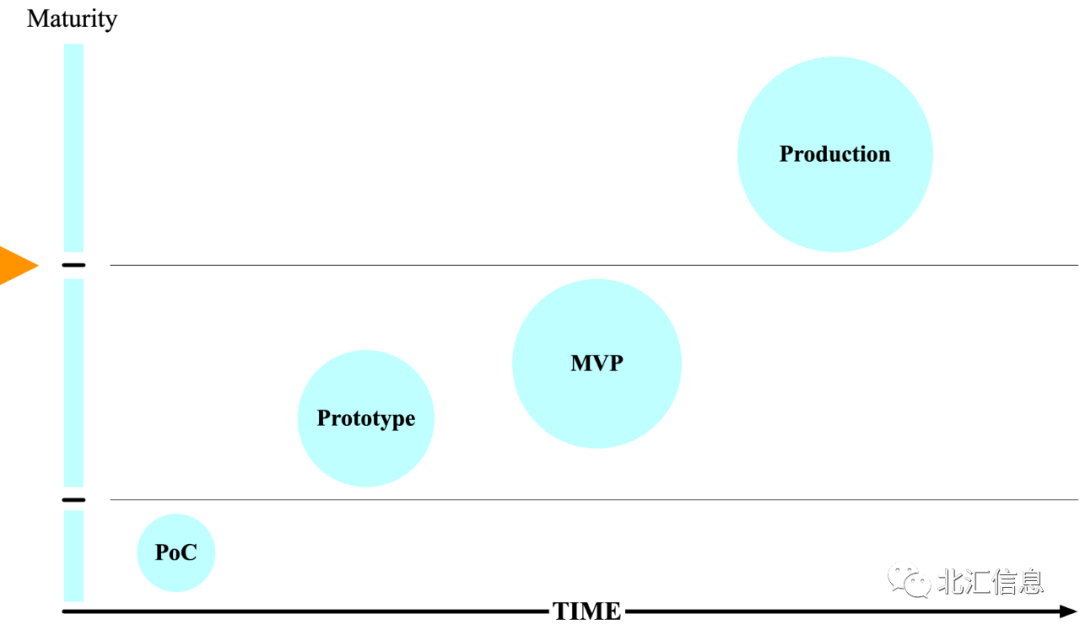
新型技术快速落地过程中,概念原型验证(proof of concept,POC)或构建系统原型(System Prototype),是一种普遍的方法。系统原型对实际系统还原度越高,对后续新技术的可行性与必要性验证越充分,最终达成实际项目的工程应用。同时,具有项目风险性小,沉没成本低等特点。
北汇信息致力于为汽车客户提供全面而成熟的车载TSN网络通信应用解决方案,主要涵盖TSN技术的设计、仿真、原型构建、测试验证及工具链应用等工程服务领域。
本文将重点阐述,北汇信息依据客户定制化需求,TSN网络原型构建相关的工程服务内容。
01中央式架构通信应用场景
中央式架构是汽车电子架构的终极目标,车载电子系统是典型的分布式实时系统,需要满足硬实时、软实时与严格实时等功能需求。
因此,新架构中的网络通信架构会有如下特点:

网络架构特点
接入层:网络端口类型丰富,且资源充足; 汇聚层:多采用环网设计,实现高可靠性; 核心层:具体实现与HPC硬件平台相关;
数据流特点
传感器数据:Sensor -> HPC; 控制指令:HPC -> Actuator; 软件进程数据交互:分布式系统之间;
02PoleLink TSN 原型
北汇信息构建了一套TSN网络原型,目的通过可视化的方式展现TSN技术,在车载网络中的工程应用作用与效果。同时,兼顾自驾系统对网络通信QoS约束,及DDS-TSN 基础软件架构的可行性验证需求。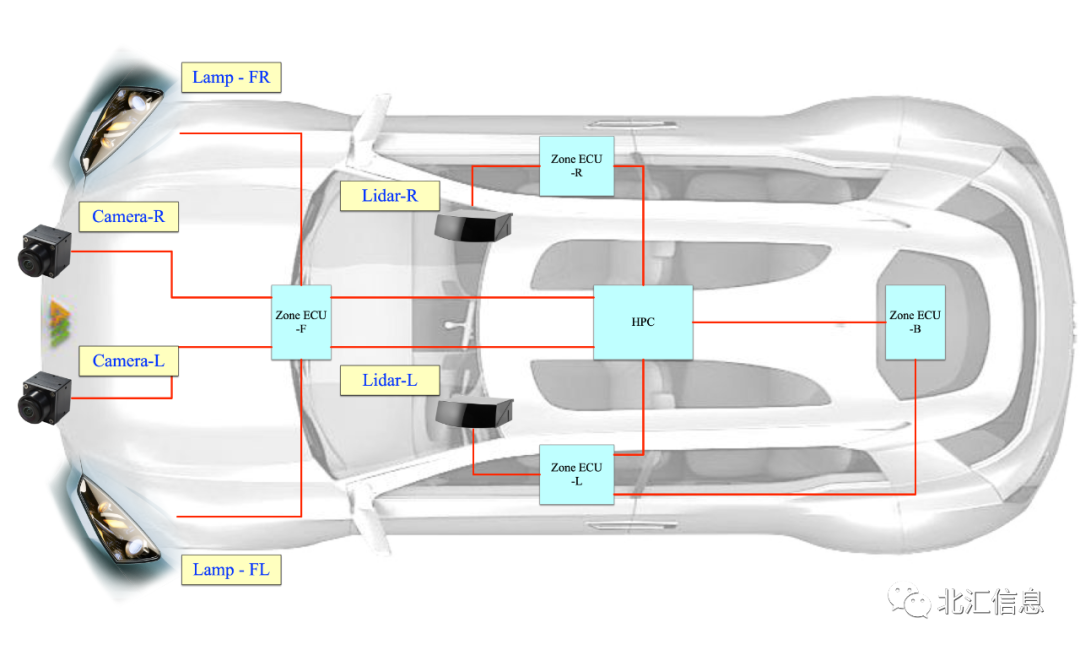 03网络原型拓扑设计
03网络原型拓扑设计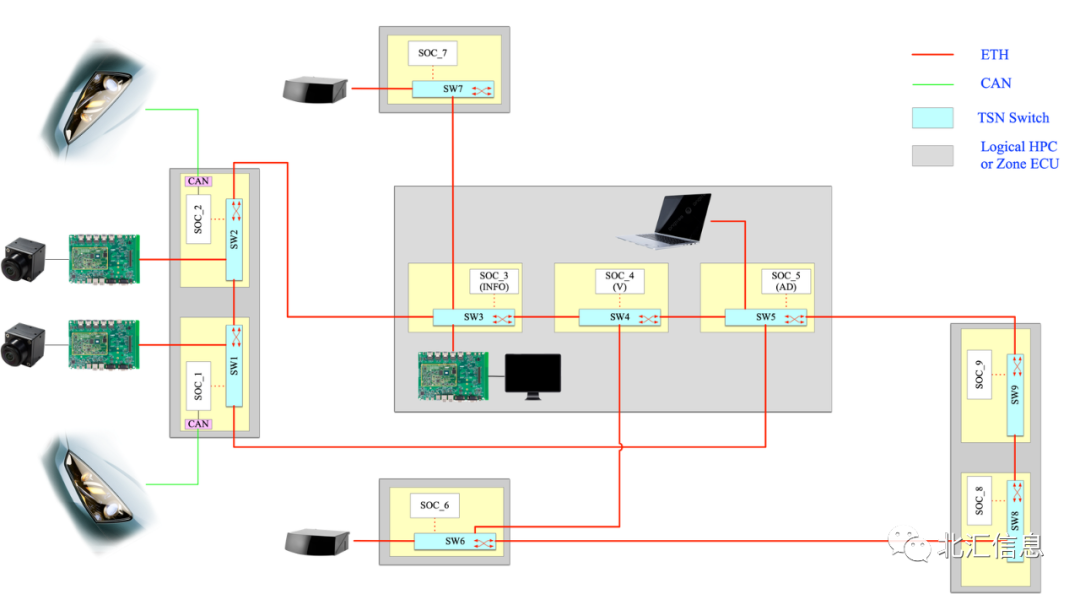
04通信应用场景实现网络原型涵盖了中央式架构典型的网络通信应用场景,如下所示:
时间同步场景
LiDAR, Camera, Switch等网络节点或设备实现时间同步
关键与重要数据流的网络传输QoS约束
传感器数据传输Sensor -> HPC:Camera视频流使用CBS整形
传感器数据传输Sensor -> HPC:LiDAR点云数据流使用TAS整形
控制数据传输HPC -> Actuator:HPC大灯控制流使用TAS整形
以太网环网设计
HPC大灯控制流使用CB实现网络链路冗余
LiDAR点云数据流使用CB实现网络链路冗余
05
通信数据流定义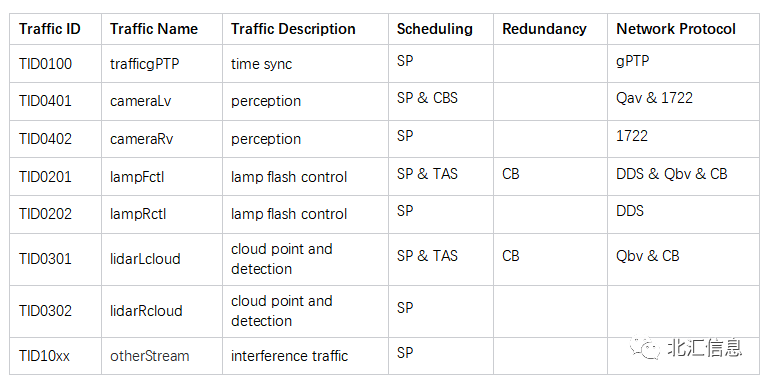 06
06
通信协议应用
原型系统中涉及的主要网络通信协议如下:
TSN protocol
gPTP, Qav, Qbv, CB, 1722
其它通信协议
DDS
07原型系统硬件列表

08原型全景展示
09结论
TSN网络原型使用了gPTP、Qav、Qbv、CB、1722等TSN协议,及DDS上层通信协议;综合考虑了中央式架构中网络通信应用场景,选择了网络通信架构中代表性的数据流,完成TSN技术设计与应用的场景实现。
其中,TSN网络原型的网络数据流特性与数量,TSN协议应用范围,传感器、执行器、TSN交换机等硬件选型,可依据实际项目中网络拓扑结构和数据传输需求进行调整与适配。
本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。