目前全球范围内乘用车最主流的混动系统主要有:单电机并联、双电机串并联(混联)、以及动力分流三种混动结构。本文从丰田THS 1/2代和通用Voltech2代的结构入手,分析了这两套系统各自行驶模式下的动力流。
欧洲厂商相对更倾向使用单电机并联的混动结构。按照电机在整个传动系中不同的布置位置,又可以分为P0,P1,P2,P3,P4等结构(见图1)。例如德国大众Glof GTE(DQ400E)将电机和电机离合器布置于发动机与变速器之间,为P2的结构;国内市场热销的比亚迪秦将电机布置在差速器前,为P3结构;比亚迪唐在秦的基础上,在后桥上又增加了一个电机,形成了P3+P4的双电机并联结构,同时实现了电四驱;此外,目前热门的48V弱混系统大都是将单电机布置在原来发电机的位置,即为P0结构。
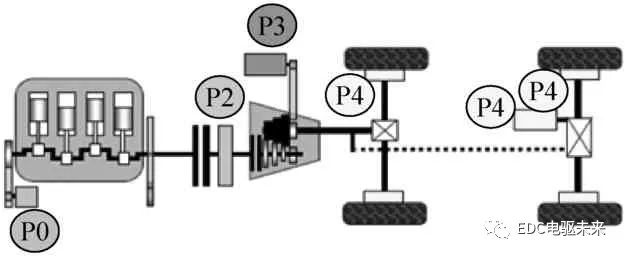
图1 单电机并联结构
Fig.1 Single-EM Parallel Structure
上海汽车的荣威E550(图2),三菱欧蓝德PHEV以及本田的i-MMD混动系统采用的都是双电机混联结构,可以实现串联、并联、发动机直驱等混动模式,本文不作过多的介绍。
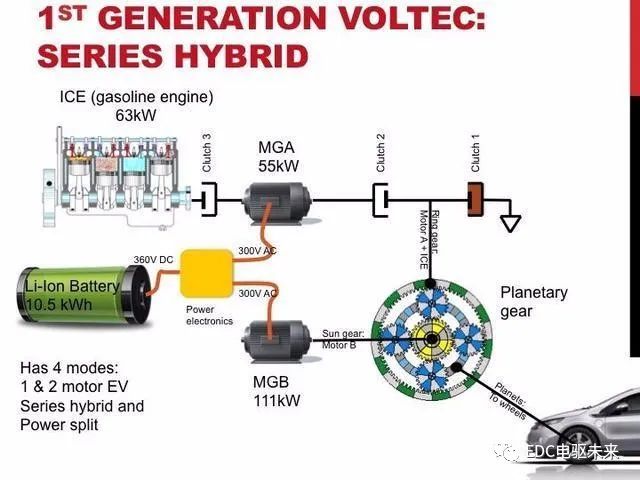
在美日混动乘用车市场占据绝对主力的混动结构则是以丰田THS (TOYOTA Hybrid System)以及通用Voltech为代表的E-CVT动力分流(Power-Split)混动系统。下面将对这两种系统做详细深入的介绍和分析。
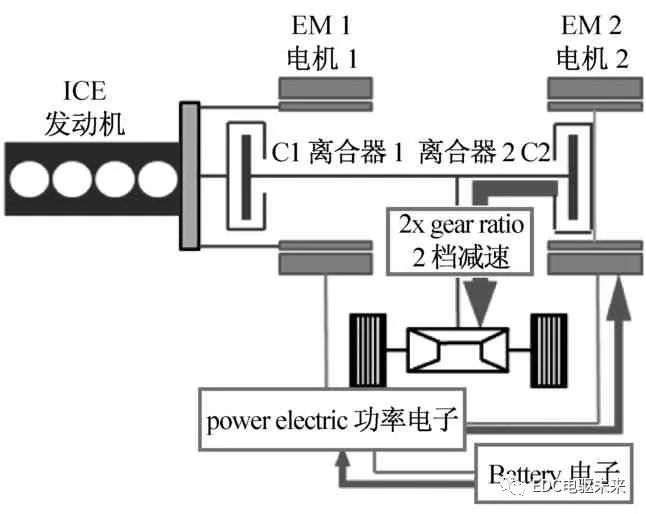
图2 上海汽车荣威e550 EDU结构图
Fig.2 SAIC Rowea E550 Twin-EM Series/Parallel Structure
1 丰田THS 1/2代系统
丰田普锐斯、卡罗拉双擎、雷凌双擎,雷克萨斯CT200h等混动车型使用的均为THS(TOYOTA Hybrid System)混动系统[4-6]。
1.1 结构原理
THS 1/2代混动系统的结构组成如图3所示,由一台阿特金森发动机(ICE),两个电机(EM1,EM2)以及一个简单行星轮组成。
ICE与行星架(C)连接, EM1与太阳轮(S)连接, EM2与齿圈(R)连接并与差速器连接以输出动力。该系统可以实现 纯电(EV Mode) 及 动力分流(Power-Split Mode) 两种行驶模式。
为了便于后面计算分析,这里定义简单行星轮的齿圈齿数Zr与太阳轮齿数Zs比∝为:
(1)
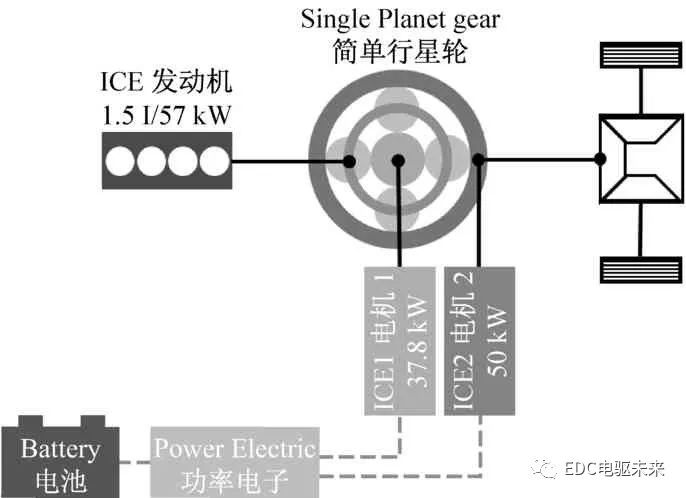
图3 TOYOTA THS Gen1/2结构原理
Fig.3 Structure of THS Gen1/2
1.2 不同驾驶模式的动力流分析
1) 纯电模式(EV Mode):
纯电模式下,如图4所示, ICE处于停机状态(锁止),EM2通过齿圈直接驱动车辆行驶,此时EM1由于简单行星轮的运动关系处于反向空转的状态。假设车辆前进时齿圈顺时针旋转(下同),则EM1和EM2运动关系如图5所示。
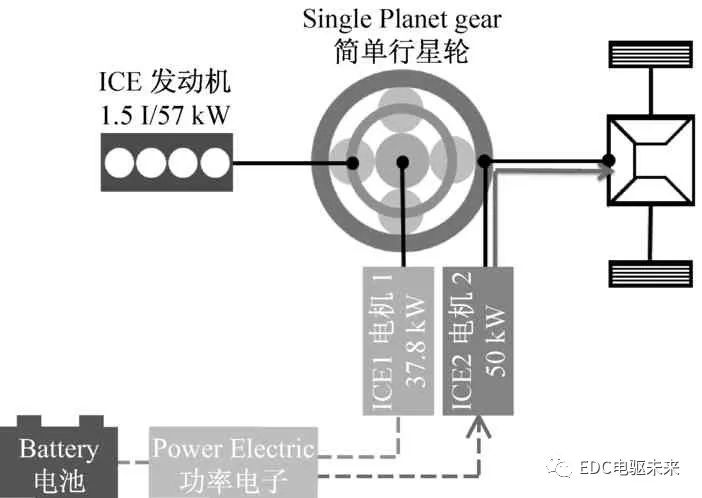
图4 纯电模式动力流
Fig.4 EV Mode Power Flow
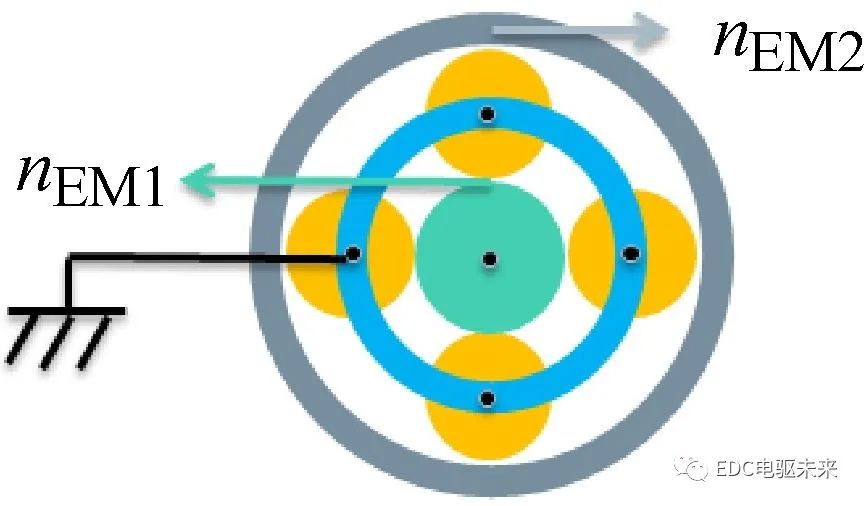
图5 EV Mode行星齿轮各元件运动关系
Fig.5 EV Mode kinematic relation
通过杠杆法(The Level Analogy[7])我们可以对该运行模式下的行星轮各运动元件进行转速及扭矩的分析,如图6所示。
此时EM2正转输出功率,EM1反向空转,且转速为EM2的α倍(式2),整个系统的输出扭矩Tsum即为TEM2(式3):

(2)
(3)
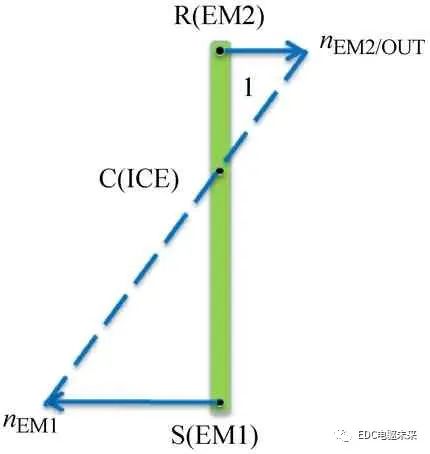
图6 EV Mode杠杆法转速分析
Fig.6 EV Mode Level Analogy Analysis
由于EM1转速为EM2的α倍,受限于EM1的最高转速,纯电模式下车速最高只能达到40MPH(约64KPH,基于普锐斯α=2.6得出),之后发动机必须启动,以降低EM1的转速。
2) 动力分流模式(Power-Split Mode):
动力分流模式下,如图7所示, ICE处于运行状态将功率通过行星架输入到行星轮系中,EM1处于负功率的发电状态,EM2处于输出功率的状态。行星轮系各元件运动关系如图8所示。
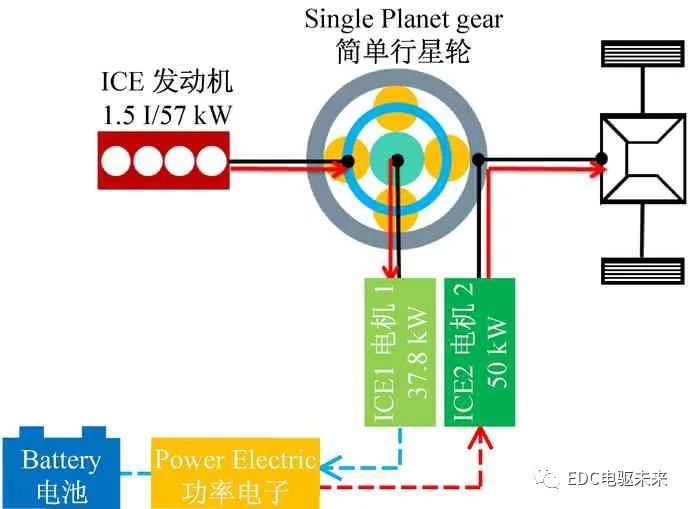
图7 动力分流模式
Fig.7 Power-Split Mode Power Flow
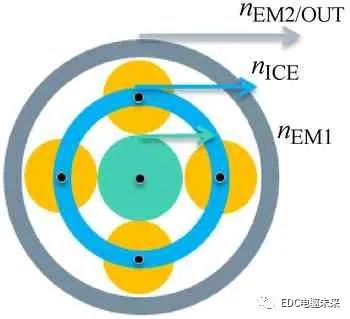
图8 Power-Split Mode行星齿轮各元件运动关系
Fig.8 Power-Split Mode kinematic relation
同样通过杠杆法对该运行模式下的行星轮各运动元件进行转速及扭矩的分析(见图9)。
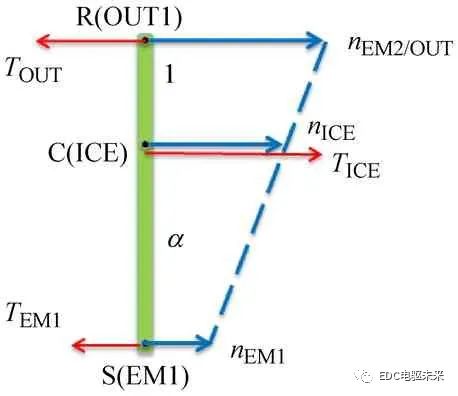
图9 Power-Split Mode杠杆法转速扭矩分析
Fig.9 Power-Split Mode Level Analogy Analysis
从图9我们可以得出发动机(ICE)、EM1、EM2的转速关系满足式4:

(4)
ICE,EM1和输出到差速器的扭矩相互平衡,满足式5:

(5)
由α=2.6,带入式4和式5后可得式6式7,即发动机输入到行星轮系中的扭矩的72%输出到差速器驱动车辆,28%通过EM1进行发电。

(6)
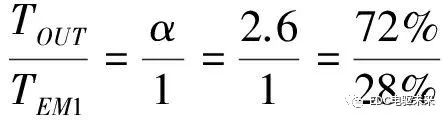
(7)
整个系统输出到差速器用于驱动车辆的总扭矩如下式所示:

(8)
综上,当车辆瞬时的行驶状态一定时(即输出转速nEM2/OUT及行驶阻力扭矩TOUT确定):
● 由式6可知,通过控制EM1的转速,可以调整发动机的转速;
● 由式8可知,通过控制EM2的扭矩,可以调整发动机的输出扭矩。
图10展示了某传统汽油发动机的油耗特性曲线,对于这台发动机而言,当转速在2600转,扭矩在130Nm左右时发动机的瞬时油耗最低(浅绿色区域)。所以对于双电机动力分流的混动系统来说,在动力分流行驶模式下,发动机的扭矩与转速可以解耦地进行调整,这样发动机可以尽可能地工作在最佳油耗区域。这一结论同样适用与之后将介绍的通用Voltech 2代混动系统。[8-9]
1.3 动力分流混动效率分析
为了考量动力分流模式下的混动效率,我们提出下面两个假设前提:
1) 整车为HEV,即非插电式混动;
2) 不考虑电池SOC,即发电电机的发电功率完全供给驱动电机用于驱动车辆,即PEM1=-PEM2。
在以上两个假设条件下,混动模式中发动机输出的功率越多地参与驱动车辆,越少地用于发电后再通过另一电机驱动车辆(多次能量转换),能量转换的损失就越小,即可以理解为理论上的混动效率越高。
通过上一节中的杠杆法所作的分析,我们可以求得两个电机功率PEM与发动机功率PICE关系式9:
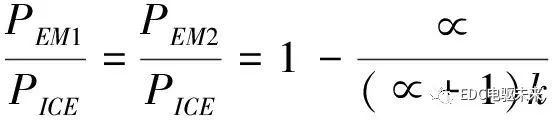
(9)
两个电机转速nEM与发动机转速nICE比的关系式10,式11:
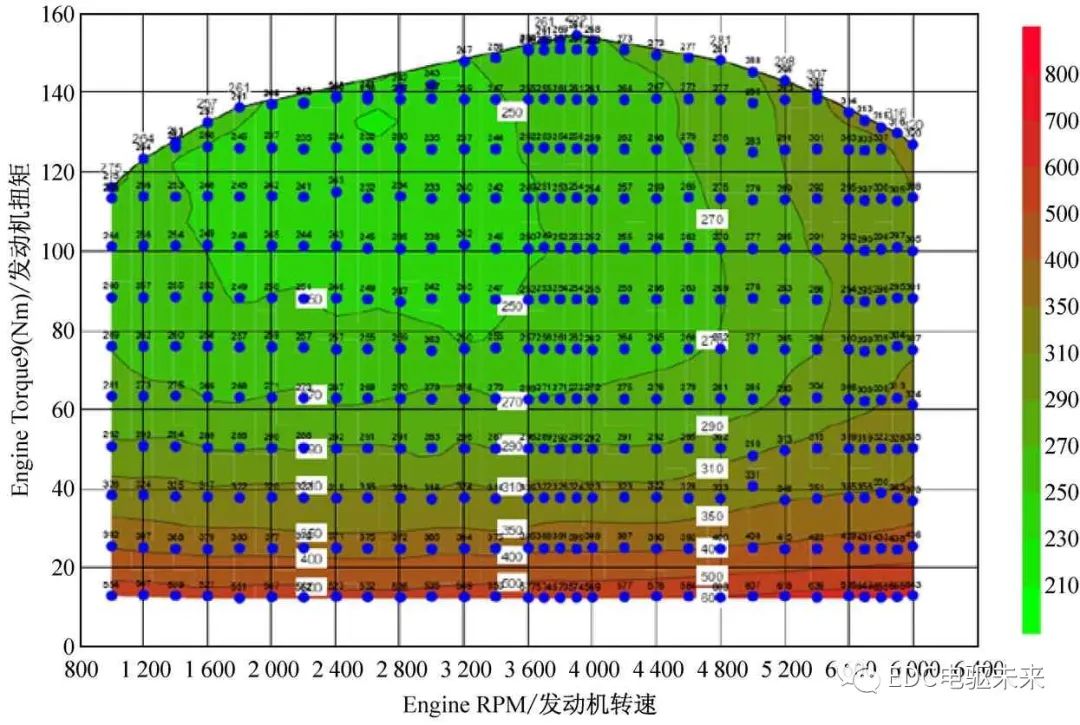
图10 某传统汽油发动机油耗特性曲线
Fig.10 Gasoline Engine Fuel Consumption Diagram (Example)
(10)
(11)
两个电机扭矩TEM与发动机扭矩TICE比的关系满足式12,式13:
(12)
(13)
根据式9-13分别作出功率比、扭矩比、转速比的曲线,如图11所示:
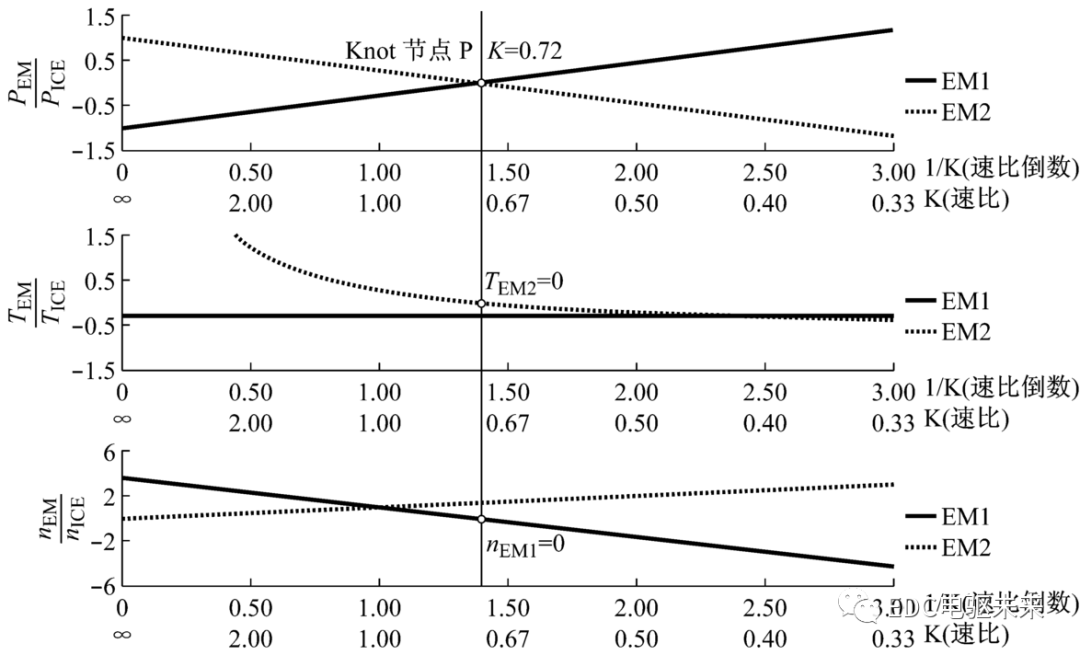
图11 电机、发动机功率比、扭矩比、转速比曲线
Fig.11 EM,ICE Power Ratio, Torque Ratio, Rotation speed Ratio
从图上可见,该系统中有一个节点P(Knot),其对应的速比K为0.72(如上节所述,设α=2.6),在这个节点上EM1和EM2的功率都为零,其中EM2的扭矩TEM2=0,EM1的转速nEM1=0,此时发动机输出的所有功率均用于驱动车辆。
当速比大于节点K=0.72时(0.72左侧),EM1发电(负功率),且发电所得所有功率都用于EM2输出功率驱动车辆,当速比为∞时,两个电机与发动机功率比为±1,即发动机功率全部用于EM2发电后供给EM1驱动车辆。
当速比小于节点K=0.72时(0.72右侧),EM2开始发电(负功率),EM1开始输出正功率,此时发动机的功率在系统输出端(齿圈)进行分流,一部分用于驱动车辆,一部分由EM2发电后再将功率提供给EM1驱动太阳轮,这样就形成了动力回流(Power Circulation),效率相对较低。
因此,在实际运行时,速比K一般会控制在节点0.72以上(图中0.72左侧)。
为了弥补纯电模式下的最高车速较低这一系统限值,丰田在新一代的THS系统中增加了一组简单行星轮作为减速机构,如图12所示。第2组简单行星轮的加入一方面可以解决EM1在纯电模式下空转转速高的问题,对于PHEV的意义更大,另一方面可以降低系统对于EM2的功率扭矩要求。
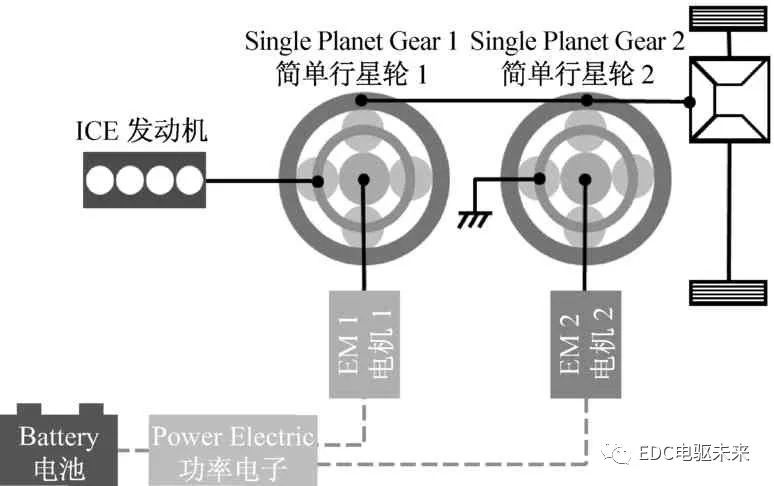
图12 TOYOTA THS Gen3结构原理图
Fig.12 Structure THS Gen3
2 通用沃兰达 Voltech 2代混动系统
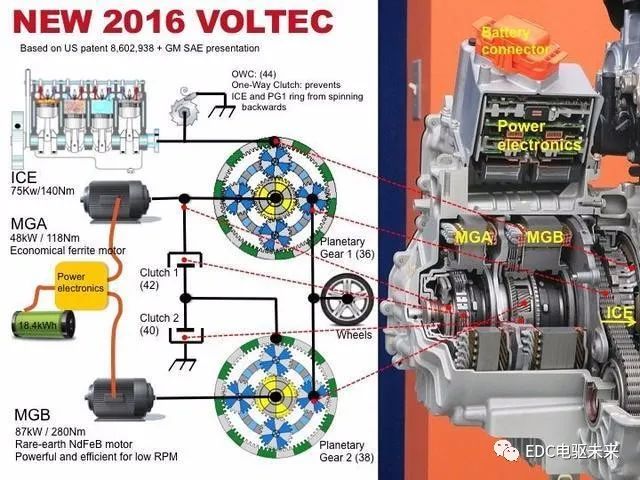
2.1 结构原理
通用汽车在全新一代沃兰达Volt上使用了Voltech 2代混动变速器。其结构如图13所示,由一台75kW发动机,两个电机(EM1,EM2),一个单向离合器,两组多片式离合器组成。可以实现以下5种行驶模式,其中模式3为单分流模式,模式5为复合分流模式:
1) 单电机纯电模式(Single-EM EV Mode);
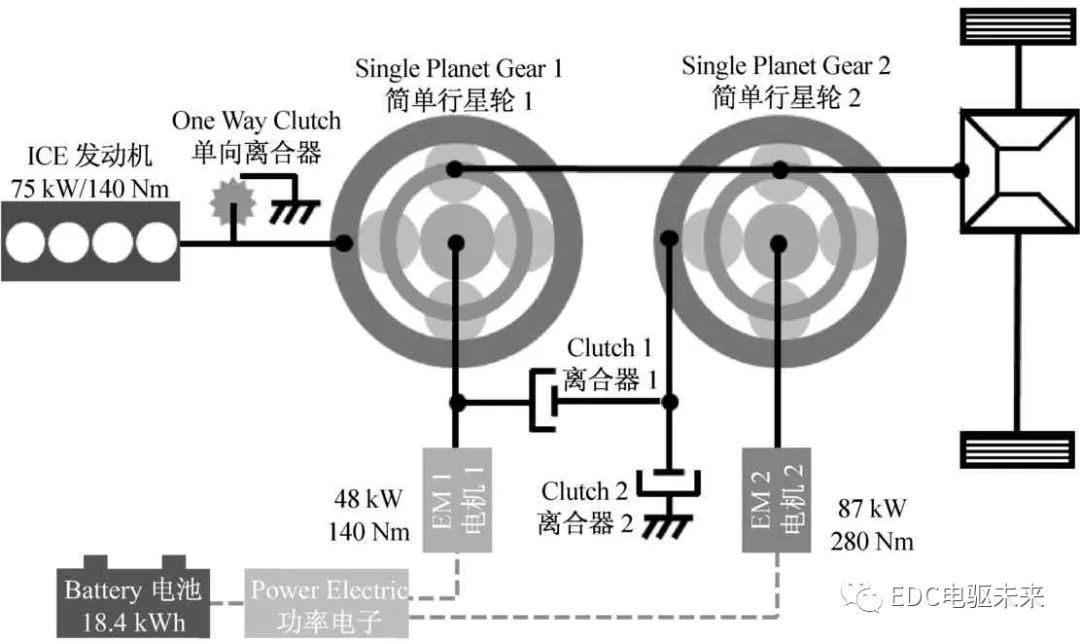
图13 GM Voltech 2代结构原理图
Fig.13 Structure GM Voltech2
2) 双电机纯电模式(Twin-EM EV Mode);
3) 低增程模式(Low Extended Range Mode);
4) 定速比增程模式(Fixed Ratio Extended Mode);
5) 高增程模式(High Extended Range Mode)。
2.2 不同行驶模式的动力流分析
由于本文主要讨论和研究混动效率,因此这里仅对模式3“低增程模式“ 和模式5“高增程模式”运用杠杆法进行分析。其他的运行模式仅作简要的动力流介绍。
1) 单电机纯电模式(Single-EM EV Mode):
如图14所示,单电机纯电模式下,ICE处于熄火状态,离合器2接合使得简单行星轮2的齿圈固定,EM2输出动力到行星轮2的太阳轮,最终由行星轮2的行星架将动力输出至差速器驱动车辆。
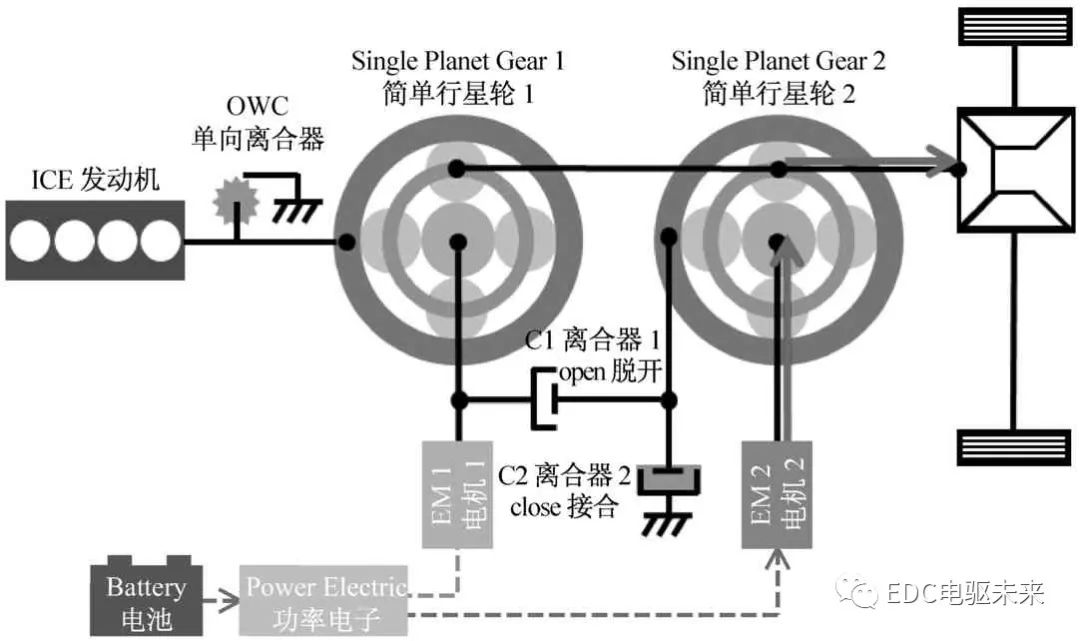
图14 单电机纯电模式动力流
Fig.14 Single-EM EV Mode Power Flow
2) 双电机纯电模式(Twin-EM EV Mode):
如图15所示,在单电机纯电模式的基础上,双电机模式下EM1也同时参与驱动,其与行星轮1的太阳轮连接,行星轮1的齿圈由于单向离合器的作用而被固定,EM1的动力由行星轮1的行星架输出到差速器共同参与驱动车辆。
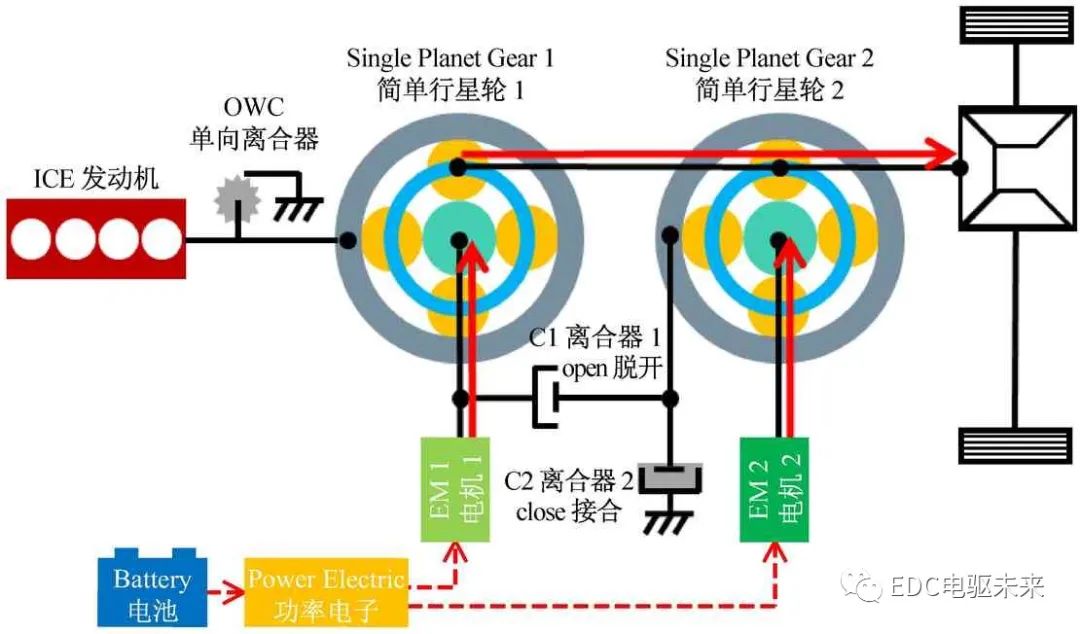
图15 双电机纯电模式动力流
Fig.15 Twin-EM EV Mode Power Flow
3) 低增程模式(Low Extended Range Mode):
如图16所示,低增程模式与丰田THS的动力分流模式类似,为一种单分流模式。此时ICE运行输出功率到简单行星轮1的齿圈,一部分功率驱动EM1进行发电,其余功率通过行星轮1的行星架输出到差速器参与驱动车辆;EM2输出正功率,通过行星轮2的行星架输出共同驱动车辆。
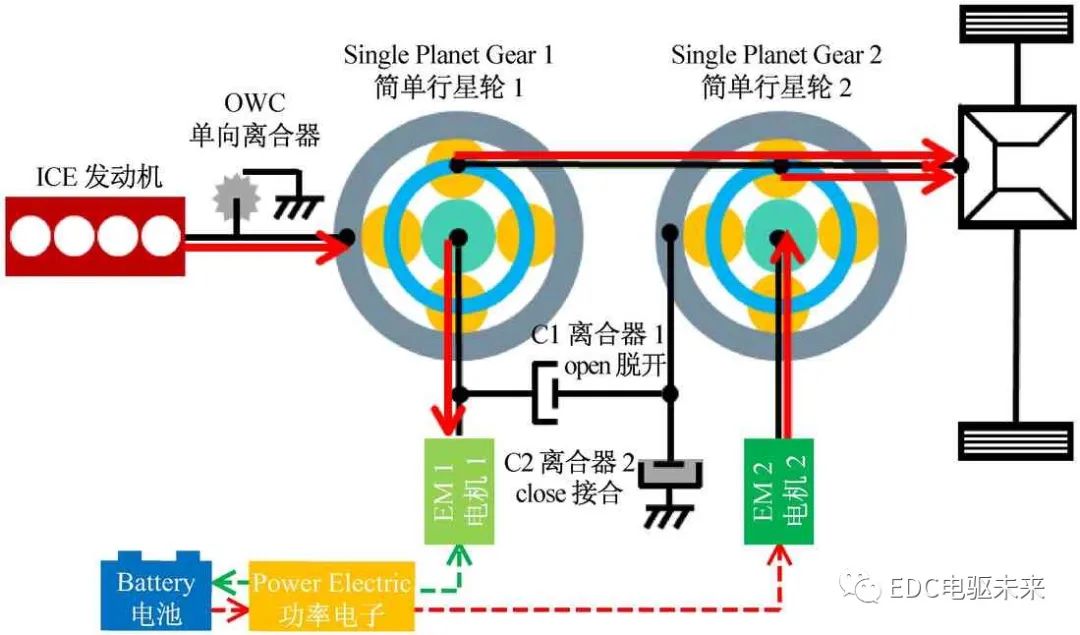
图16 低增程模式动力流
Fig.16 Low Extended Range Mode Power Flow
首先运用杠杆法对低增程模式中的简单行星轮1进行运动和扭矩分析,各元件的转速和扭矩关系如图17所示:
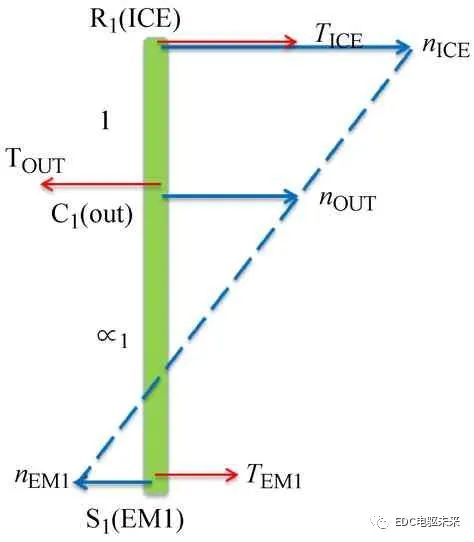
图17 低增程模式杠杆法分析_简单行星轮1
Fig.17 Low Extended Range Mode Level Analogy Analysis:
Single Planet Gear 1
从图17可以得出ICE、EM1以及输出端行星架C1的转速关系满足式14,输出端扭矩TOUT与EM1的扭矩TEM1满足式15:

(14)

(15)
如图18再对简单行星轮2进行运动分析,可得式16:

(16)
合并式9与式10,可得ICE、EM1、EM2的转速关系式17:

(17)
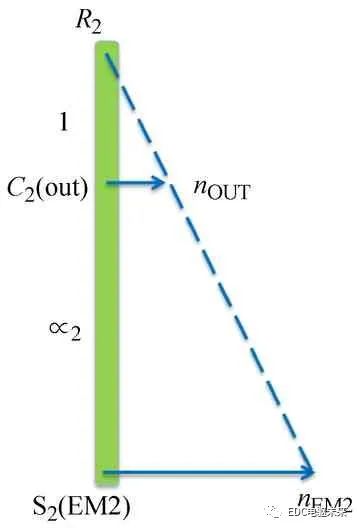
图18 低增程模式杠杆法分析_简单行星轮2
Fig.18 Low Extended Range Mode Level Analogy Analysis:
Single Planet Gear 2
最终可以得到EM与ICE的功率比关系式:
(18)
EM与ICE的转速比关系式:
(19)
(20)
EM与ICE的扭矩比关系式:
(21)
(22)
4) 定速比增程模式(Fixed Ratio Extended Mode):
如图19所示,此模式下两个离合器都接合,电机1、行星轮1的太阳轮、行星轮2的齿圈都被固定,ICE动力输入到行星轮1的齿圈,通过行星架2输出动力到车轮,此时EM2可以输出功率,也可以发电。但是从发动机到车轮的速比是固定不变的。

图19 定速比增程模式动力流
Fig.19 Fixed Ratio Extended Mode Power Flow
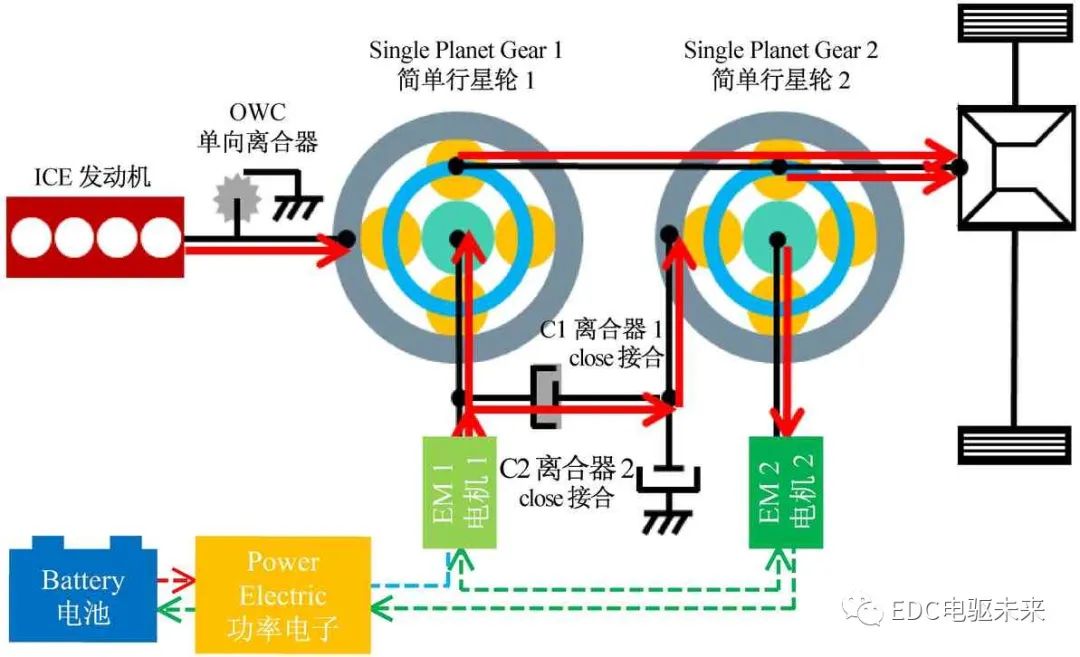
图20 高增程模式动力流
Fig.20 High Extended Range Mode Power Flow
5) 高增程模式(High Extended Range Mode):
此为第二种动力分流模式,是一种复合分流模式。此时离合器1接合,离合器2脱开,ICE输出的功率一部分输出到车轮,一部分可以通过EM2发电,同时EM1输出正功率参与驱动。
再次运用杠杆法进行运动和扭矩分析,将两个行星轮进行合成后,各元件的转速和扭矩关系如图21所示,为了简化计算,取a=∝1,b=∝1∝2-1:
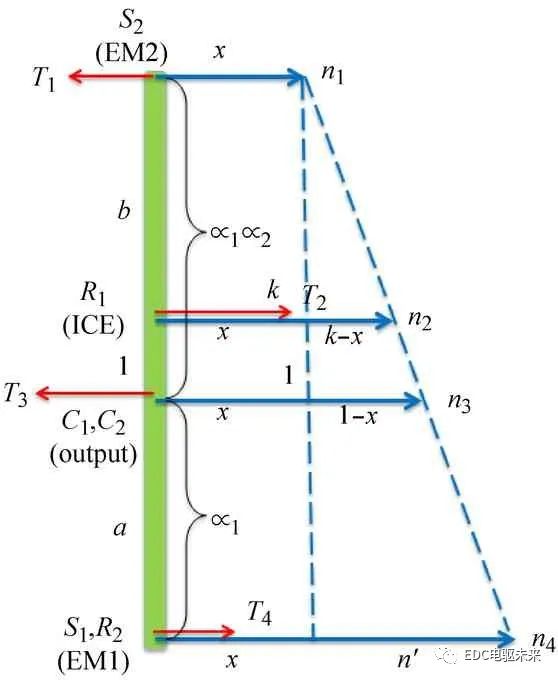
图21 高增程模式杠杆法分析
Fig.21 High Extended Range Mode Level Analogy Analysis
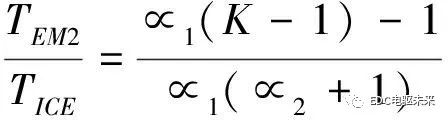
最终可以得到EM与ICE的功率比关系式:

(23)
EM与ICE的转速比关系式:

(24)
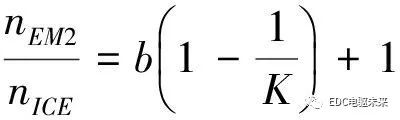
(25)
EM与ICE的扭矩比关系式:

(26)

(27)
2.3 动力分流混动效率分析
从相关资料中查得Voltech2代两个行星轮实际的参数∝1=∝2=2.4(即a=∝1=2.4,b=∝1∝2-1=4.76),根据得出的关系式(单分流见式18-22,复合分流见式23-27),可以分别作出两种模式的电机/发动机功率比、扭矩比、转速比对应速比K及速比倒数(1/K)的曲线,如图22所示。图中直线表示单分流模式,曲线表示复合分流模式。
由下图可见,这套动力分流系统有三个节点P0,P1和P2。单分流模式对应的节点为P0,复合分流模式对应的节点为P1和P2。实际求得单分流的节点P0和复合分流的节点P1重合,对应速比K=1.42,P2对应的速比K=0.83。在这两个节点上两个电机的功率均等于0,两个电机的扭矩和转速满足表1的关系,而模式4定速比模式(Fixed Ratio Extended Mode)恰恰对应的是P1节点。
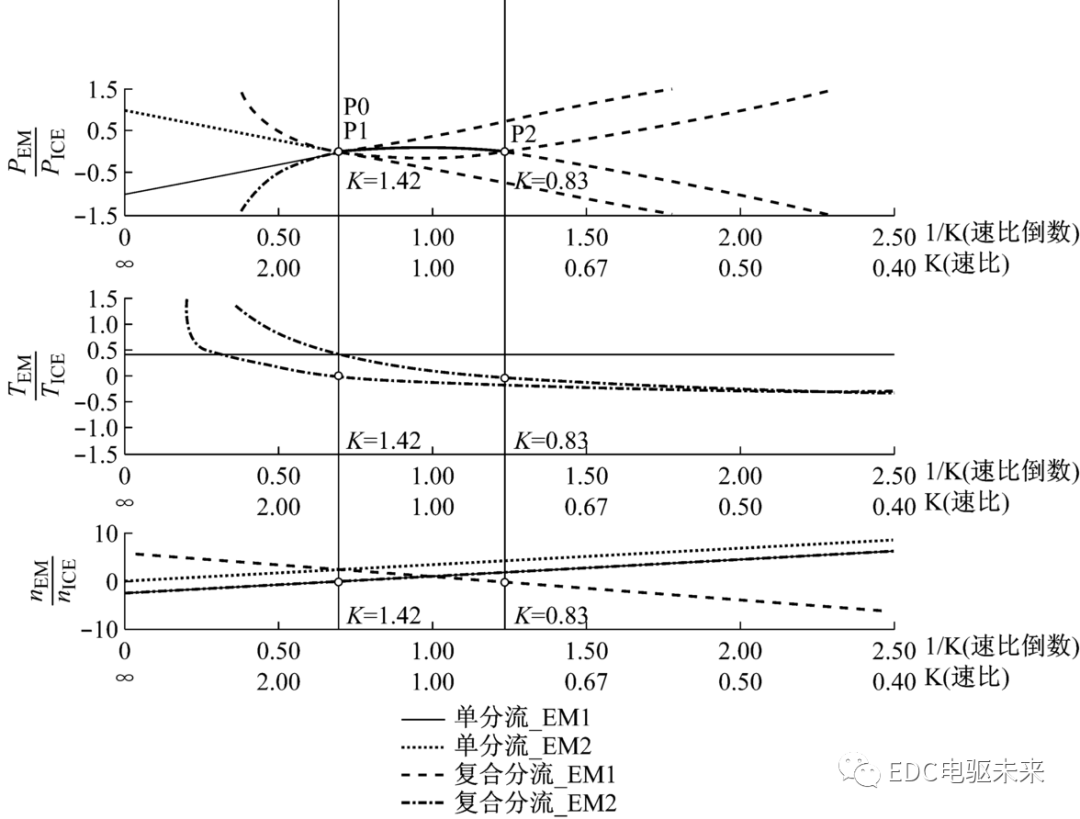
图22 电机、发动机功率比、扭矩比、转速比曲线
Fig.22 EM,ICE Power Ratio, Torque Ratio, Rotation speed Ratio
表1 Voltech2代分流模式节点电机功率、扭矩、转速关系
Table 1 Voltech Gen2 EM1,EM2 Power,Torque,Speed on Knot

图中虚线均表示低效率的动力回流工作区域:对于单分流模式来说,速比K小于1.42(P0,P1)为动力回流区域;对于复合分流模式来说,速比大于1.42(P0,P1)及小于0.83(P2)的区域均为动力回流区域。
因此,实际工作中在速比较大时系统应采用低增程(单分流)工作模式;速比小于1.42后切换至高增程(复合分流)工作模式,模式切换点即为P0,P1节点;车辆高速巡航时,系统可切换至固定速比模式,此时EM1不参与工作,EM2工作状态可视情况而定。
在复合分流模式下的P1和P2两个节点之间,可以看到两个电机与发动机的功率相比单分流模式更加接近0,这就意味着发动机输出的功率更多地用于直接驱动车辆,因此具有相对更高的混动效率。
3 丰田THS与通用Voltech 2代优缺点分析
丰田THS 1/2代混动系统由一个简单行星轮组成,无需离合器,机械结构极其简单,因此材料和制造成本方面优势明显。但其硬件结构决定了只能实现单分流混动模式,。
通用Voltech 2代由两个简单行星轮组成,同时还需要1个单向离合器和2组多片式离合器进行控制,机械结构上相对复杂了不少,对于变速器布置设计和制造都提出了更高的要求,因此制造成本上无疑更高,同时控制和标定也会更加复杂。但其复杂的机械结构带来了单分流和复合分流两种混动模式,使得其速比范围可以做得更大,同时在复合分流模式下具有更高的混动效率。
4 总结和展望
本文从丰田THS 1/2代和通用Voltech2代的结构入手,分析了这两套系统各自行驶模式下的动力流,并通过对其各自动力分流模式下的功率计算,比较了其理论上的混动效率的优劣。
目前无论是国际上还是国内新能源汽车仍然处于起步阶段,其发展方向很大程度上也取决于外部政策的导向。比如国内现在大力鼓励发展插电式混动汽车,单电机并联和双电机混联结构在“大电池”的协助下,回避了其混动效率较低的劣势,同时发挥了其成本低、开发周期短、控制策略简单等优势。
若在“不插电”这一假设前提下,动力分流的混动结构由于可以通过两个电机解耦地对发动机转速和扭矩进行调整,使其始终工作在最佳油耗区域,因此其相较传统混动结构无疑具有更高的混动效率。