STM32CubeMX系列 | 独立看门狗
1. 独立看门狗简介
看门狗其实就是一个定时器,从功能上说它可以让微控制器在程序发生意外(程序进入死循环或跑飞)的时候,能重新回复到系统刚上电状态,以保障系统出问题的时候可以重启一次。说的复杂一点,看门狗就是能让程序出问题是能重新启动系统 STM32的独立看门狗(IWDG)由内部专门的40KHz低速时钟驱动,即使主时钟发生故障,它也仍然有效。注意IWDG的时钟是一个内部RC时钟,是一个在30~60KHz之间的一个可变化的时钟,只是我们在估算的时候以40KHz的频率来计算,看门狗对时间的要求不是很精确 独立看门口功能框图如下。实际上独立看门口狗是一个递减计数器,当计时器的值减到0时,IWDG会产生一个复位信号,系统复位重新启动。为避免产生看门狗复位,则需在计数器减到0之前重载计数器,即“喂狗”。当程序出错时没有刷新计数器,计数器递减到0,系统复位重新启动,避免程序继续错误运行

独立看门狗超时时间(40KHz的输入时钟LSI)

2. 硬件设计
使用USART1来打印调试信息,PC0用来指示程序是否复位

3. 软件设计
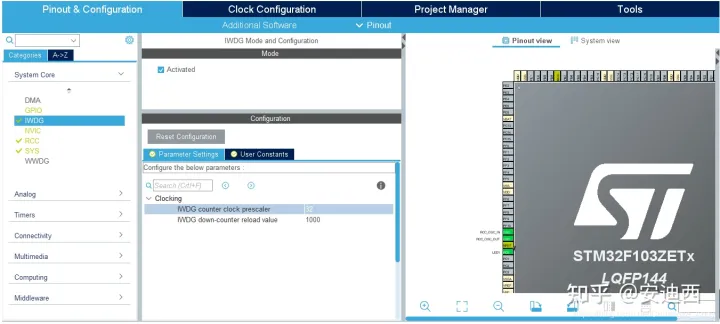
3.1 STM32CubeMX设置
RCC设置外接HSE,时钟设置为72M;IWDG的时钟默认为LSI时钟
PC0设置为GPIO推挽输出模式、上拉、高速、默认输出电平为高电平
USART1选择为异步通讯方式,波特率设置为115200Bits/s,传输数据长度为8Bit,无奇偶校验,1位停止位

激活IWDG,IWDG的时钟为40kHz,此时设置计数器时钟为32分频,则分频后的时钟频率为1.25KHz(时钟周期为1s/1250 = 0.8ms),递减基础器重载值(down-counter reload value)配置为1000,即800ms不刷新IWDG则系统复位
输入工程名,选择工程路径(不要有中文),选择MDK-ARM V5;勾选Generated periphera initialization as a pair of ‘.c/.h’ files per IP ;点击GENERATE CODE,生成工程代码
3.2 MDK-ARM编程
在iwdg.c文件中可以看到独立看门狗的初始化函数
void MX_IWDG_Init(void){
hiwdg.Instance = IWDG;
hiwdg.Init.Prescaler = IWDG_PRESCALER_32;
hiwdg.Init.Reload = 1000;
if (HAL_IWDG_Init(&hiwdg) != HAL_OK){
Error_Handler();
}
}
在main函数中编写代码,while循环里每500ms喂一次狗
int main(void){
HAL_Init();
SystemClock_Config();
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_IWDG_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("rn***** AndyXi IWDG test program *****rn");
HAL_Delay(300);
HAL_GPIO_WritePin(GPIOC,LED1_Pin,GPIO_PIN_RESET);
/* USER CODE END 2 */
/* USER CODE BEGIN WHILE */
while (1){
printf("rnRefreshes the IWDG...!rn");
HAL_IWDG_Refresh(&hiwdg);
HAL_Delay(500);
/* USER CODE END WHILE */
}
}
4. 下载验证
while循环里每500ms喂一次狗,因此程序不会被复位,LED1常亮
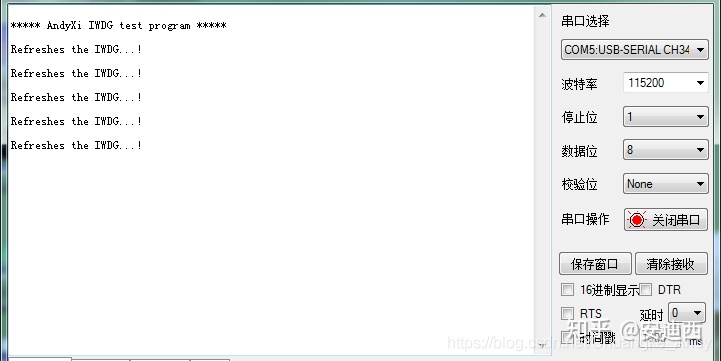
如果注释掉while循环里的喂狗动作,程序会一直被复位,LED1闪烁

本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。